强通信受限下的分布式多雷达信号级协同检测与定位方法
1.本发明属于雷达信号处理技术领域,具体涉及一种强通信受限下的分布式多雷达信号级协同检测与定位方法。
背景技术:
2.随着科技的进步,城市物流发展迅速,通过无人机运输实现“最后一公里”配送能极大地提高物流效率。而由于无人机体积小、城市环境复杂,单民用低空雷达探测威力、视域有限,一旦无人机失控便会对空域安全造成很大的威胁,因此目前无人机物流运输仍得不到广泛应用。在此背景下,得益于传感器网络通信技术、多雷达信息融合处理技术和资源控制技术的快速发展,分布式多雷达协同探测系统受到了民用方面的广泛关注。与单站雷达相比,由于分布式多雷达协同探测系统将每个雷达分散布置、连接组网,可从多个视角探测目标,从而有效减少目标的rcs起伏并带来探测威力的提升,同时多雷达组网视域广,大大地减少了城市低空环境中的监视真空区。因此分布式多雷达协同探测技术有很大的民用研究价值。
3.对于分布式多雷达协同探测中的目标检测与定位技术,传统工程上的做法是先在每个雷达站中对回波数据进行局部处理,然后将各站估计的目标时延、角度等数据级结果传输到融合中心进行融合,从而得到全局的判决、融合结果,如文献“exact solution for elliptic localization in distributed mimo radar systems.ieee transactions on vehicular technology,vol.67,no.2,pp.1075-1086,2017”和专利cn202111370253.4等,这类方法仅需传输数据级信息至融合中心,与融合中心的通信速率小、雷达组网控制功能相对简单,但其在低信噪比情况下对目标的探测性能损失较大。近些年在学术界出现了将局部站点的原始信号级数据传输到融合中心进行融合的方法,如文献“multi-target detection strategy for distributed mimo radar with widely separated antennas.ieee transactions on geoscience and remote sensing,vol.60,pp.1-16,2022.”等,这类方法能够充分利用接收站点的信号级信息,可在低信噪比下获得鲁棒的检测定位性能,但由于需要传输完整回波信号至融合中心,因此需要局部站点与融合中心之间有极大的通信速率资源,这在地形复杂、只能进行无线布站即通信受限的环境里是难以满足的。因此,如何让分布式多雷达协同探测系统既能在通信受限的环境中正常工作,又能获得高检测定位性能,是颇有研究价值的技术难题,也是实现分布式多雷达协同系统大规模投入应用的核心前提。
技术实现要素:
4.为解决上述技术问题,本发明提出了一种强通信受限下的分布式多雷达信号级协同检测与定位方法。
5.为了便于描述本发明内容,首先做以下术语进行解释:
6.定义1.分布式多雷达系统,
7.分布式多雷达系统是指由多个分置在空间不同位置的雷达,通过有线或者无线通信方式与一个融合中心连接组网,同时利用不同角度探测目标获得空间多样性,从而实现对微弱目标的高性能探测的系统。
8.定义2.协同探测,
9.指的是各雷达站相互协作、同时发射信号、同步探测目标。
10.定义3.融合中心,
11.融合中心是指雷达组网系统中的数据处理中心,它的作用是对系统检测区域建立空间统一坐标系,将各雷达站传输的回波数据进行空间、时间配准与联合处理,从而实现对目标的高性能探测。
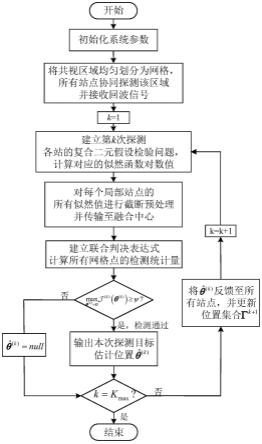
12.本发明采用的技术方案为:一种强通信受限下的分布式多雷达信号级协同检测与定位方法,具体步骤如下:
13.s1、初始化强通信受限下的分布式多雷达协同探测系统参数;
14.s2、将共视区域均匀划分为网格点,所有网格点的位置组合成一个集合,各雷达同时发射信号对该区域进行协同探测,并接收回波信号;
15.s3、建立各站的复合二元假设检验问题,计算对应的似然函数对数值;
16.s4、对每个局部站点的似然值进行截断预处理并传输至融合中心;
17.s5、在融合中心建立各雷达站的联合判决表达式,遍历并计算监视区域内所有网格点的检测统计量;
18.s6、取监视区域内所有网格点的检测统计量中的最大值作判决:若大于等于门限,则说明检测到目标,将该最大值对应的位置作为本次探测的目标估计位置输出;若小于门限,则说明没有检测到目标,对本次探测的目标估计位置赋值为空;
19.s7、判断探测次序是否达到上界,若达到,则结束算法;若没有达到,则将本次探测得到的目标估计位置反馈给所有雷达站点,更新参数后进入下一次探测,返回至步骤s3。
20.进一步地,所述步骤s3中,复合二元假设检验问题的表达式为:
[0021][0022]
其中,表示第n个站第k个脉冲重复周期的距离维基带离散信号,(表示复数集)为在各站间互相独立,具有噪声协方差矩阵cn的复高斯向量,m表示脉冲重复周期采样点数,为sn(τn(θ
(k)
))的简写,指的是发射的连续信号在经过时延τn(θ
(k)
)以及一系列处理得到的一个脉冲重复周期内的基带离散信号向量,θ
(k)
为第k次探测中目标的真实位置,为目标复反射系数,和分别表示在第k个脉冲中目标信号不存在和存在的假设,每个假设下对应的似然函数表达式与分别为:
[0023]
[0024][0025]
其中,κ0与κ1为与目标位置无关的系数,h表示矩阵的共轭转置。
[0026]
通过一系列求解,第n个站第k次探测的局部似然值向量可写为:
[0027][0028]
其中,t表示矩阵的转置,且表示第n个站第k次探测的局部似然值,具体展开为:
[0029][0030]
其中,τ
n,i
表示第n站点第i个采样点的时延,且τ
n,i
=its,fori=1,2,...,m,n=1,2,...,n,n表示雷达数量,ts表示采样间隔。
[0031]
进一步地,所述步骤s4中,首先采用恒虚警检测准则进行截断处理,其次根据融合中心反馈的前序探测定位结果提取出对应时延位置的数据,然后对截断处理的数据进行排序剔除,并与提取的数值向量进行合并,得到要传输的数值向量,最后将向量中的非空值进行量化编码传输,并在融合中心译码还原。
[0032]
进一步地,所述步骤s4中,对局部站点的似然值数据进行截断的准则为:
[0033][0034]
其中,为截断后的似然数值向量,为第k次探测第n个站点第i个采样点的截断门限,其表达式为:
[0035][0036]
其中,表示估计杂波功率,βn表示门限因子,p
ce,n
表示截断概率,j表示局部截断参考单元数。
[0037]
根据前序探测定位结果矩阵γk对通道数据进行提取的表达式为:
[0038][0039]
其中,为提取的通道数值,为提取的数值向量,为取整符号,表示第i次探测中目标的估计位置。
[0040]
随后排序剔除截断数据,更新后的向量记为从而得到最终需要传输的数值向量为:
[0041][0042]
其中,
[0043]
进一步地,所述步骤s5中,分布式多站雷达联合判决检测统计量表达式为:
[0044][0045]
其中,g表示将共视区域均匀划分为网格点,所有网格点的位置组合成的一个集合,表示监视区域内θ
(k)
对应网格点的检测统计量:
[0046][0047]
其中,ψ为检测门限,通过生成完全无目标的噪声数据,进行100/p
fa
次蒙特卡洛实验可计算得到,p
fa
表示全局虚警概率,p
fa
需满足:
[0048][0049]
其中,表示第k次探测的目标估计位置。
[0050]
进一步地,所述步骤s7中,更新前序探测定位结果矩阵γ
k+1
的表达式为:
[0051][0052]
本发明的有益效果:本发明的方法首先在各局部站点对接收到的回波信息进行预处理截断与筛选,滤除大部分底噪信号并尽可能保留有效信号,接着将各局部站点保留的数据传输至融合中心进行全局融合,然后将全局判决、定位结果反馈至各局部站点,在下一次信号截断时更大程度保留可能存在目标的信号片段,最后通过依次循环检测、估计、反馈、截断等步骤实现在强通信速率受限下(5mbps以内)对目标的高性能协同检测与定位。本发明的方法有效避免了由于通信受限造成有效信号丢失,给低信噪比目标的检测、定位性能带来很大损失的现象,能实现在强通信速率约束下对目标的高性能检测与高精度定位,适用于民用低空监视、智慧交通等领域。
附图说明
[0053]
图1为本发明的一种强通信受限下的分布式多雷达信号级协同检测与定位方法的流程图。
[0054]
图2为本发明实施例中的分布式多雷达布站位置与目标位置示意图。
[0055]
图3为本发明实施例中的平均单站通信速率随脉冲编号的变化曲线。
[0056]
图4为本发明实施例中提供的多次蒙特卡洛试验的检测性能曲线。
[0057]
图5为本发明实施例中提供的多次蒙特卡洛试验的定位精度曲线。
具体实施方式
[0058]
下面结合附图与实施例对本发明的方法做进一步的说明。
[0059]
为了便于描述本发明内容,首先做以下术语进行解释:
[0060]
定义1.分布式多雷达系统
[0061]
分布式多雷达系统是指由多个分置在空间不同位置的雷达,通过有线或者无线通信方式与一个融合中心连接组网,同时利用不同角度探测目标获得空间多样性,从而实现对微弱目标的高性能探测的系统。
[0062]
定义2.协同探测
[0063]
指的是各雷达站相互协作、同时发射信号、同步探测目标。
[0064]
定义3.融合中心
[0065]
融合中心是指雷达组网系统中的数据处理中心,它的作用是对系统检测区域建立空间统一坐标系,将各雷达站传输的回波数据进行空间、时间配准与联合处理,从而实现对目标的高性能探测。
[0066]
本发明主要采用仿真实验的方法进行验证,所有步骤、结论都在matlab2016a上验证正确。如图1所示,本发明的一种强通信受限下的分布式多雷达信号级协同检测与定位方法流程图,具体步骤如下:
[0067]
s1、初始化强通信受限下的分布式多雷达协同探测系统参数:
[0068]
本实施例中,考虑如图2所示的分布式多雷达协同探测系统,系统所采用的雷达类型为毫米波段的线性调频连续波雷达,按照如表1所示的数值对参数进行初始化:雷达数n=9,雷达位置分别为(1,0.5)、(1.25,0.35)、(1.50,0.22)、(1.75,0.1)、(2,0)、(2.25,0.1)、(2.5,0.22)、(2.75,0.35)、(3,0.5)km,目标位置θ为(2,1)km,载频分别为75、75.5、76、76.5、77、77.5、78、78.5、79ghz,脉冲重复周期t
pri
=300us,雷达带宽w=150mhz,采样率fs=5mhz,采样间隔ts=0.2us,发射信号为线性调频连续波信号,全局虚警概率p
fa
=1
×
10-6
,单个站点与融合中心之间的通信带宽约束w
com
=5mbps,局部站点截断概率pc=0.015625,量化位数为q
量化
=64bit,定位结果追溯数q=5,局部截断参考单元数j=100,探测次序上界/蒙特卡洛数试验次数k
max
=5000。
[0069]
表1
[0070][0071][0072]
s2、将共视区域均匀划分为网格点,所有网格点的位置组合成一个集合g,n个雷达同时发射信号对该区域进行协同探测,并接收回波信号,
[0073]
经过混频、放大、滤波、采样、距离维fft等处理,我们可以得到距离维基带离散信号,即第n个站第k个脉冲重复周期的信号可写成如下形式:
[0074][0075]
其中,(表示复数集)为在各站间互相独立,具有噪声协方差矩阵cn的复高斯向量,为的简写,指的是发射的连续信号在经过时延τn(θ
(k)
)以及一系列处理得到的一个脉冲重复周期内的基带离散信号向量,θ
(k)
为第k次探测中目标的真实位置,为目标复反射系数,k=1,...,k
max
,首先令k=1。
[0076]
本实施例中参与融合处理的毫米波雷达距离维信号是每个脉冲经过距离维快速离散傅里叶变换(fft)后的,而并非从速度维fft后的二维平面中提取(若在实际工程中需从该途径提取,本发明方法也同样适用),且在后续步骤中将第k个脉冲重复周期定义为第k次探测。
[0077]
s3、建立第k次探测各站的复合二元假设检验问题,计算对应的似然函数对数值,具体分步骤如下:
[0078]
s31、首先,在每个局部站点可将目标的检测问题写为一个二元假设检验问题,即:
[0079][0080]
其中,和分别表示在第k个脉冲中目标信号不存在和存在的假设,每个假设下对应的似然函数表达式与分别为:
[0081][0082][0083]
其中,κ0与κ1为与目标位置无关的系数,h表示矩阵的共轭转置。
[0084]
s32、其次,局部似然比可写为:
[0085][0086]
取对数得到:
[0087][0088]
s33、再次,当(的估计值)时,似然比达到最大,的值可通过对求零点(求导再赋值为0)得到:
[0089][0090]
即可以得到:
[0091][0092]
将(8)式代入(6)式可以得到局部似然对数值表达式为:
[0093][0094]
s34、最后,我们将第n个站第k次探测的局部似然值向量写为
[0095][0096]
其中,t表示矩阵的转置,且表示第n个站第k次探测的局部似然值,具体展开为:
[0097][0098]
其中,τ
n,i
表示第n站点第i个采样点的时延,且τ
n,i
=its,fori=1,2,...,m,n=1,2,...,n,n表示雷达数量,ts表示采样间隔。
[0099]
s4、对每个局部站点的似然值进行截断预处理并传输至融合中心,具体分步骤如下:
[0100]
s41、首先对局部站点的似然值数据进行截断,截断准则如下所示:
[0101][0102]
其中,为本步骤截断后的似然数值向量,为第k次探测第n个站点第i个采样点的截断门限,当第i个采样点的值大于等于该门限时,该点数据将被保留,否则将被舍去。截断门限的设定取决于截断概率p
ce,n
,即:
[0103]
[0104]
在通信带宽受到约束的情况下,为了稳定控制截取的数据点数,本实施例采用单元平均恒虚警检测(ca-cfar)的方法设置门限,通过估计第i个采样点周围2j个参考单元的杂波功率以及将截断概率p
ce,n
作为局部虚警概率,可以得到估计杂波功率表达式以及门限因子,分别为:
[0105][0106][0107]
然后可以得到截断门限的表达式为:
[0108][0109]
s42、其次根据融合中心反馈的前序探测定位结果提取出第k次探测中所有站点对应时延位置的数据。将前序探测定位的结果存为一个矩阵γk,这里根据探测序号k值与定位结果追溯数q值分情况讨论,即:
[0110][0111]
其中,表示第i次探测中目标的估计位置,它的值也可能为null(空值,即当第i次探测里未检测到目标),且矩阵γk中可能有多个值相同(当时间过短目标未跨距离单元移动)。根据前序探测定位结果矩阵γk,我们对通道数据进行提取,即:
[0112][0113]
其中,为提取的通道数值,为本步骤提取的数值向量,为取整符号,。
[0114]
s43、再次根据步骤s42中提取的通道数据量结果对步骤s41中截取的数据进行排序剔除。由于根据通信受限情况设定的截断概率p
ce,n
决定了第n站向融合中心传输的数据点数上限n
ce,n
=p
ce,n
·
m,假定步骤s42中提取的有效数据点数为则对步骤s41的向量进行数值由大到小排序,并保留前位数值,其余元素赋值null,并将更新过后的数值向量记为
[0115]
s44、接着对步骤s42与步骤s43的数值矩阵取并集,得到最终需要传输的数值向量:
[0116][0117]
其中,
[0118]
s45、最后将向量中非null元素进行q
量化
=64bit量化编码(实部与虚部各32bit)并传输至融合中心,并在融合中心对数据进行译码还原,则实际第n站与融合中心的通信速率数值为
[0119]
s5、在融合中心建立各雷达站联合判决表达式,遍历计算监视区域内所有网格点的检测统计量。分布式多雷达联合判决检测统计量表达式可以建立为:
[0120][0121]
其中,表示监视区域内θ
(k)
对应网格点的检测统计量:
[0122][0123]
其中,ψ为检测门限,通过生成完全无目标的噪声数据,进行100/p
fa
次蒙特卡洛实验可计算得到,p
fa
需满足:
[0124][0125]
根据式(21),遍历计算所有网格点θ
(k)
∈g对应的联合判决检测统计量值
[0126]
s6、取监视区域内所有网格点的检测统计量中的最大值作判决,具体分步骤如下:
[0127]
s61、根据式(20),取监视区域内所有网格点的检测统计量中的最大值作判决:若该最大值大于等于检测门限ψ,则继续步骤s62;若小于ψ,则进行步骤s63;
[0128]
s62、当该最大值大于等于ψ时,假设被接受,即检测到了一个目标,将该最大值对应的位置作为第k次探测的目标估计位置并输出该估计位置。
[0129]
s63、当该最大值小于ψ时,假设被接受,即未检测出目标,则对第k次探测的目标估计位置赋值为
[0130]
s7、判断探测次序是否达到上界,具体分步骤如下:
[0131]
s71、判断探测次序k是否达到上界k
max
:若达到,则结束算法;若没有达到,则进行步骤s72。
[0132]
s72、将本次探测得到的目标估计位置反馈给各局部站点,并更新前序探测定位结果矩阵γ
k+1
为
[0133]
[0134]
s73、进入下一次探测,令探测次序k=k+1,返回至步骤s3;
[0135]
根据以上步骤,本实施例得到的平均单站通信速率随脉冲编号的变化曲线如图3所示,5000次蒙特卡洛仿真试验的检测定位性能分析结果如图4,图5所示。
[0136]
图3展示了本实施例的平均单站通信速率随脉冲编号的变化曲线图。其中,全信号级融合方法指的是在通信不受限的情况下利用各站完整的目标回波信息进行全局积累融合、检测定位的方法,基于信号截断的方法指的是在通信受限的情况下仅在各局部站点对数据进行截断,并将保留的数据传至融合中心进行全局判决的方法。从图中可以看到,全信号级融合方法下每站所需的平均通信速率为320mbps,这在需要无线通信组网布站的复杂地形环境中是难以满足的。而基于信号截断的方法与本发明提出的方法所需的平均通信速率始终可以满足系统给定的5mbps的强通信限制。
[0137]
图4与图5分别探究了三种方法对目标的检测性能与定位精度。从图4与图5可以看到,随着目标信噪比的增加,目标检测概率逐渐升高至1、定位误差rmse逐渐下降至0.02m。同时,在强通信速率受限的情况(5mbps)下,本发明提出的方法的性能均优于基于信号截断的方法,且略低于不受通信限制的全信号级融合方法(320mbps)。这也验证了本发明提出的强通信受限下的分布式多雷达信号级协同检测与定位方法能有效地提取目标回波信号数据,在通信速率强受限的情况下依旧可以实现对目标的高性能协同检测与定位。
[0138]
究其原因,首先,全信号级融合方法由于利用了完整的目标回波信息进行积累融合,因此它对目标的检测与定位性能最好。而当存在强通信速率限制时,基于信号截断的方法在局部站点对回波信号进行预处理截断,通过滤除大部分的无用信号达到降低通信传输量的目的。但由于信噪比较低时,仅对数据进行截断会造成部分通道的目标有效信号丢失,进而会给全局性能带来损失。而本发明提出的方法利用融合中心与局部站点的双向通信机制,将每次的检测定位结果反馈给各局部站点,使各局部站点在下一次信号截断时能有效保留可能存在目标的信号片段,因此最大程度地保留了目标信号数据,从而实现了高性能的协同检测与定位。
[0139]
本领域的普通技术人员将会意识到,这里所述的实施例是为了帮助读者理解本发明的原理,应被理解为本发明的保护范围并不局限于这样的特别陈述和实施例。对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的权利要求范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1