一种模拟民航机场车辆车路协同设备测试场的制作方法
1.本发明涉及车辆测试场技术领域,特别是一种模拟民航机场车辆车路协同设备测试场。
背景技术:
2.近年来,随着我国经济高速发展,国家十四五规划明确指出,重点扶持发展航空航天高端无人驾驶制造业务,特别是随着航空低飞区的开禁,通用航空机场建设将呈快速增长态势,使得机场低速无人驾驶运输车的需求也将与日俱增。
3.而无人驾驶车辆在设计制造完成后,需要对其进行严格的测试后才能使用,现有的车辆测试场中,监控装置基本上都是固定设置的,其并不能实时监控无人驾驶车辆在测试过程中的实时数据,对于无人驾驶车辆在车路协同设备是否符合标准并不能给予准确地判断。
技术实现要素:
4.本部分的目的在于概述本发明的实施例的一些方面以及简要介绍一些较佳实施例。在本部分以及本技术的说明书摘要和发明名称中可能会做些简化或省略以避免使本部分、说明书摘要和发明名称的目的模糊,而这种简化或省略不能用于限制本发明的范围。
5.鉴于上述和/或现有的模拟民航机场车辆车路协同设备测试场中存在的问题,提出了本发明。
6.因此,本发明所要解决的问题在于如何提供一种模拟民航机场车辆车路协同设备测试场。
7.为解决上述技术问题,本发明提供如下技术方案:一种模拟民航机场车辆车路协同设备测试场,其包括,道路,所述道路至少包括一个交叉路口;监测单元,设置于道路的两侧,包括埋设在地下的供电组件、与所述供电组件滑动配合的取电组件、与所述取电组件配合的监控组件、设置于道路两侧并用于监控组件进行移动的移动槽;所述供电组件包括供电轨道、设置于所述供电轨道内的安装板,以及与所述安装板配合的导电片,所述导电片包括火线片和零线片;所述取电组件包括第一取电件、第二取电件、中间连接件和驱动件,所述第一取电件内设置有与所述火线片接触的第一取电片,所述第二取电件内设置有与所述零线片接触的第二取电片,所述中间连接件的两端分别与所述第一取电件和第二取电件铰接,所述驱动件带动所述第一取电件在所述供电轨道内进行移动。
8.作为本发明所述模拟民航机场车辆车路协同设备测试场的一种优选方案,其中:所述道路为双车道,并且在道路上设置有静态障碍物。
9.作为本发明所述模拟民航机场车辆车路协同设备测试场的一种优选方案,其中:所述静态障碍物包括故障车、发生车祸事故的车辆、隔离墩、井盖、警示桶、警示牌、洒落在道路上的物体、滚落在道路上的山石中的一项或多项的仿真模型或实体,和/或站立的假人。
10.作为本发明所述模拟民航机场车辆车路协同设备测试场的一种优选方案,其中:在所述交叉路口处设置有交通信号灯。
11.作为本发明所述模拟民航机场车辆车路协同设备测试场的一种优选方案,其中:所述供电轨道包括直线段和弧线段,所述弧线段设置于所述交叉路口处,所述供电轨道为u型轨道,在其两内侧面设置有与所述安装板卡合的第一卡槽,所述安装板上设置有与所述火线片卡合的第三卡槽,以及与所述零线片卡合的第四卡槽,所述第一取电片同时与两个所述火线片接触,所述第二取电片同时与两个所述零线片接触。
12.作为本发明所述模拟民航机场车辆车路协同设备测试场的一种优选方案,其中:供电轨道在所述第一卡槽下方设置有第二卡槽,所述第一取电件包括第一壳体,所述第一壳体底部设置有与所述第二卡槽配合的第一限位板,所述第一取电片设置于所述第一壳体内,所述第二取电件包括第二壳体,所述第二壳体底部设置有与所述第二卡槽配合的第二限位板,所述第二取电片设置于所述第二壳体内。
13.作为本发明所述模拟民航机场车辆车路协同设备测试场的一种优选方案,其中:所述驱动件包括设置于所述第一壳体内的电机、与所述电机输出端连接的第一齿轮,以及固定在所述供电轨道上的齿条。
14.作为本发明所述模拟民航机场车辆车路协同设备测试场的一种优选方案,其中:所述中间连接件包括上连接件和下连接件,所述上连接件设置于所述第一壳体和所述第二壳体的端面,所述下连接件设置于所述第一壳体和所述第二壳体的相对面,所述上连接件、第一壳体和所述第二壳体上均设置有穿线孔,所述上连接件为空心结构,导线能够通过所述穿线孔与第一取电片或第二取电片连接。
15.作为本发明所述模拟民航机场车辆车路协同设备测试场的一种优选方案,其中:所述监控组件包括与所述上连接件固定连接的连接杆,以及设置于所述连接杆端部的摄像头,所述连接杆与所述移动槽配合。
16.作为本发明所述模拟民航机场车辆车路协同设备测试场的一种优选方案,其中:所述摄像头通过导线与第一取电片和第二取电片连接。
17.本发明有益效果为:在道路的两侧设置有能够随无人驾驶车辆移动的监控组件,能够实时对无人驾驶车辆进行监控,并且能够准确得到车辆周围的信息,不会被障碍物遮挡视野。
附图说明
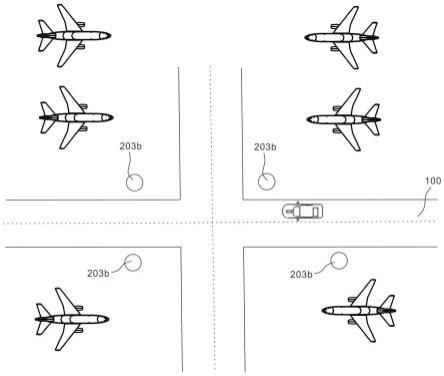
18.为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其它的附图。其中:图1为模拟民航机场车辆车路协同设备测试场的场景俯视图。
19.图2为模拟民航机场车辆车路协同设备测试场的场景示意图。
20.图3为模拟民航机场车辆车路协同设备测试场的供电轨道示意图。
21.图4为模拟民航机场车辆车路协同设备测试场的监测单元结构图。
22.图5为模拟民航机场车辆车路协同设备测试场的供电组件结构图。
23.图6为模拟民航机场车辆车路协同设备测试场的供电组件爆炸图。
24.图7为模拟民航机场车辆车路协同设备测试场的取电组件剖视图。
25.图8为模拟民航机场车辆车路协同设备测试场的第一取电件剖视图。
26.图9为模拟民航机场车辆车路协同设备测试场的取电组件结构图。
27.图中:道路100、监测单元200、供电组件201、取电组件202、监控组件203、移动槽204、供电轨道201a、安装板201b、导电片201c、火线片201c-1、零线片201c-2、第一取电件202a、第二取电件202b、中间连接件202c、驱动件202d、第一取电片202a-1、第二取电片202b-1、直线段m、弧线段n、第一卡槽201a-1、第三卡槽201b-1、第四卡槽201b-2、第二卡槽201a-2、第一壳体202a-2、第一限位板202a-21、第二壳体202b-2、第二限位板202b-21、电机202d-1、第一齿轮202d-2、齿条202d-3、上连接件202c-1、下连接件202c-2、穿线孔k、连接杆203a、摄像头203b。
具体实施方式
28.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合说明书附图对本发明的具体实施方式做详细的说明。
29.在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是本发明还可以采用其他不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本发明内涵的情况下做类似推广,因此本发明不受下面公开的具体实施例的限制。
30.其次,此处所称的“一个实施例”或“实施例”是指可包含于本发明至少一个实现方式中的特定特征、结构或特性。在本说明书中不同地方出现的“在一个实施例中”并非均指同一个实施例,也不是单独的或选择性的与其他实施例互相排斥的实施例。
31.实施例1参照图1~图9,为本发明第一个实施例,该实施例提供了一种模拟民航机场车辆车路协同设备测试场,模拟民航机场车辆车路协同设备测试场包括道路100和监测单元200,监测单元200设置于道路100的两侧,能够跟随车辆进行移动监控。
32.具体的,道路100至少包括一个交叉路口,监测单元200包括埋设在地下的供电组件201、与所述供电组件201滑动配合的取电组件202、与所述取电组件202配合的监控组件203、设置于道路100两侧并用于监控组件203进行移动的移动槽204。
33.所述供电组件201包括供电轨道201a、设置于所述供电轨道201a内的安装板201b,以及与所述安装板201b配合的导电片201c,所述导电片201c包括火线片201c-1和零线片201c-2。
34.所述取电组件202包括第一取电件202a、第二取电件202b、中间连接件202c和驱动件202d,所述第一取电件202a内设置有与所述火线片201c-1接触的第一取电片202a-1,所述第二取电件202b内设置有与所述零线片201c-2接触的第二取电片202b-1,所述中间连接件202c的两端分别与所述第一取电件202a和第二取电件202b铰接,所述驱动件202d带动所述第一取电件202a在所述供电轨道201a内进行移动。
35.需要说明的是,机场车辆在行驶时,速度都不会很快,因此本发明中的监控组件203在驱动件202d的作用下,完全能够跟随机场车辆的形式速度。
36.进一步的,所述道路100为双车道,并且在道路100上设置有静态障碍物,所述静态
障碍物包括故障车、发生车祸事故的车辆、隔离墩、井盖、警示桶、警示牌、洒落在道路上的物体、滚落在道路上的山石中的一项或多项的仿真模型或实体,和/或站立的假人。并且,在所述交叉路口处设置有交通信号灯。
37.在本发明所述测试场中,能够进行无人驾驶车辆的转向、超车、越过障碍物以及通过交叉路口的测试,并且在这个过程中,通过道路100实时跟随车辆移动的监控组件203,能够有效的监测在各个测试环节中车辆的相应指标,例如越过障碍物时,与障碍物之间的距离;转向时,与道路两侧的距离;通过交叉路口时,信号灯的识别情况及启动、制动时间,以及与飞机之间的距离等,并通过以上数据,对车辆车路协同设备进行检测。
38.进一步的,所述供电轨道201a包括直线段m和弧线段n,所述弧线段n设置于所述交叉路口处,所述供电轨道201a为u型轨道,在其两内侧面设置有与所述安装板201b卡合的第一卡槽201a-1,所述安装板201b上设置有与所述火线片201c-1卡合的第三卡槽201b-1,以及与所述零线片201c-2卡合的第四卡槽201b-2,所述第一取电片202a-1同时与两个所述火线片201c-1接触,所述第二取电片202b-1同时与两个所述零线片201c-2接触。
39.供电轨道201a在所述第一卡槽201a-1下方设置有第二卡槽201a-2,所述第一取电件202a包括第一壳体202a-2,所述第一壳体202a-2底部设置有与所述第二卡槽201a-2配合的第一限位板202a-21,所述第一取电片202a-1设置于所述第一壳体202a-2内,所述第二取电件202b包括第二壳体202b-2,所述第二壳体202b-2底部设置有与所述第二卡槽201a-2配合的第二限位板202b-21,所述第二取电片202b-1设置于所述第二壳体202b-2内。
40.在本实施例中,所述驱动件202d包括设置于所述第一壳体202a-2内的电机202d-1、与所述电机202d-1输出端连接的第一齿轮202d-2,以及固定在所述供电轨道201a上的齿条202d-3。所述中间连接件202c包括上连接件202c-1和下连接件202c-2,所述上连接件202c-1设置于所述第一壳体202a-2和所述第二壳体202b-2的端面,所述下连接件202c-2设置于所述第一壳体202a-2和所述第二壳体202b-2的相对面,所述上连接件202c-1、第一壳体202a-2和所述第二壳体202b-2上均设置有穿线孔k,所述上连接件202c-1为空心结构,导线能够通过所述穿线孔k与第一取电片202a-1或第二取电片202b-1连接。
41.所述监控组件203包括与所述上连接件202c-1固定连接的连接杆203a,以及设置于所述连接杆203a端部的摄像头203b,所述连接杆203a与所述移动槽204配合,所述摄像头203b通过导线与第一取电片202a-1和第二取电片202b-1连接。
42.需要注意的是,若安装板201b只设置1块,也就是只有1个火线片201c-1和1个零线片201c-2,则在取电组件202移动的过程中,有可能会导致取电片与相应的导电片脱离的情况,此时,监控组件203得不到供电,监控信息就是停止,形成监控组件203断电的情况,尤其是在转弯的过程中,单侧的容易安装板201b很容易导致断电情况的发生。而在供电轨道201a两侧均设置有安装板201b和导电片201c,就能够确保监控组件203能够通电。
43.需要进一步的解释的是,取电组件202设置为前后两个取电件外加一个中间连接件的原因在于:取电组件202需要与监控组件203直接连接,因为取电组件202需要带动监控组件203进行移动,并且为其进行供电,故取电组件202整体不能太短,否则无法达到上述效果,而若取电组件202太长,则在转弯时,会导致取电组件202卡死在转弯处,无法移动,因此,将取电组件202设置为第一取电件202a、第二取电件202b、中间连接件202c和驱动件202d,第一取电件202a和第二取电件202b分别用于连接火线片201c-1和零线片201c-2,中
间连接件202c连接前后两个取电件。
44.在使用时,电源线的火线和零线分别与火线片201c-1和零线片201c-2进行连接导电,根据需要在道路100设置相应障碍物,在道路100两侧设置两台监控组件203,分别设置在待测车辆的前方和后方,并且均朝向待测车辆,当待测车辆启动后,两个监控组件203与待测车辆速度保持一致进行移动,实时对待测车辆进行监控,当测试完成后,收集整理监控信息,通过监控信息,计算车辆车路协同设备是否符合标准即可。
45.应说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的精神和范围,其均应涵盖在本发明的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1