星载SAR-GMTI运动目标几何定位方法
星载sar-gmti运动目标几何定位方法
技术领域
1.本发明涉及合成孔径雷达信号处理技术领域,尤其涉及一种星载sar-gmti运动目标几何定位方法。
背景技术:
2.合成孔径雷达地面运动目标检测(synthetic aperture radar
‑ꢀ
ground moving target indication,sar-gmti)采用方位多通道技术,可以获得沿方位分布的多个天线相位中心的等效单通道回波数据,将单通道的回波数据单独成像后,对各个通道图像数据进行相位补偿和相干叠加,可以消除地面静止场景的回波,得到地面运动目标位置和速度信息。星载sar-gmti利用全球性、全天时、全天候等探测优点,可以实现重点区域运动目标探测和态势感知,是星载sar发展的一个新的方向。
3.在面向实际应用时,使用者一般需要的是经过几何校正和地图投影后的地理坐标系下的位置和速度。在机载sar中,斜距平面到地距平面投影关系相对直观和简单,根据地面入射角就可以将斜距平面内的位置和速度投影到地理坐标系下,得到地理坐标系下的大地经度、大地纬度、速度大小和方向。在星载sar中,受到地表曲率和轨道弯曲的影响,斜距平面和地距平面的转换关系相对复杂,需要进行几何定位。现有的星载sar静止场景几何定位方法有两种,一种可以利用距离-多普勒定位方程直接计算像点坐标和大地坐标(经度、纬度、高程)之间的对应关系,另一种可以利用有理多项式(rpc)模型间接拟合像点坐标和大地坐标(经度、纬度、高程)之间的多项式关系。然而,这些方法无法建立速度的投影关系,不适于星载sar-gmti运动目标几何定位,公开技术中也没有进一步给出针对星载sar-gmti运动目标的几何定位的方法。
技术实现要素:
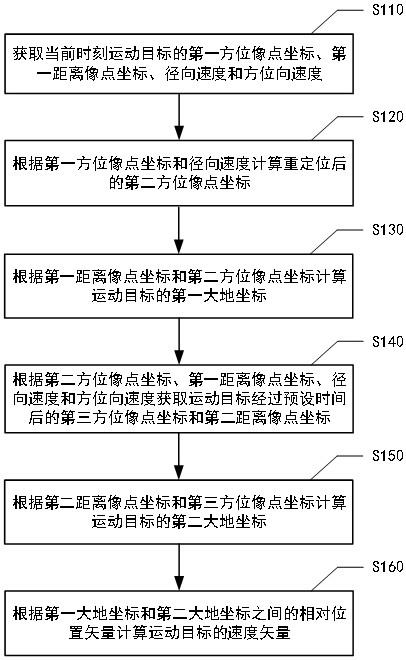
4.鉴于上述技术问题,本发明一方面提供一种星载sar-gmti运动目标几何定位方法,包括:获取当前时刻运动目标的第一方位像点坐标、第一距离像点坐标、径向速度和方位向速度;根据第一方位像点坐标和径向速度计算重定位后的第二方位像点坐标;根据第一距离像点坐标和第二方位像点坐标计算运动目标的第一大地坐标;根据第二方位像点坐标、第一距离像点坐标、径向速度和方位向速度获取运动目标经过预设时间后的第三方位像点坐标和第二距离像点坐标;根据第二距离像点坐标和第三方位像点坐标计算运动目标的第二大地坐标;根据第一大地坐标和第二大地坐标之间的相对位置矢量计算运动目标的速度矢量。
5.进一步地,根据第一方位像点坐标和径向速度计算重定位后的第二方位像点坐标,具体包括:根据星载sar-gmti的产品文件计算运动目标所在距离单元的多普勒调频率;根据径向速度计算运动目标的多普勒中心频率偏置;基于上述多普勒调频率和多普勒中心频率偏置对第一方位像点坐标进行重定位,得到第二方位像点坐标。
6.进一步地,基于上述多普勒调频率和多普勒中心频率偏置对第一方位像点坐标进
行重定位,具体包括:根据对第一方位像点坐标进行重定位,其中,d
line
为第二方位像点坐标,d
line0
为第一方位像点坐标,
△fdc
为多普勒中心频率偏置,ka为多普勒调频率,prf为星载sar的脉冲重复频率。
7.进一步地,第一大地坐标包括第一经度、第一纬度和第一高程,根据第一距离像点坐标和第二方位像点坐标计算运动目标的第一大地坐标,具体包括:提取有理多项式模型对应的文件中的模型参数,其中,模型参数包括方位坐标归一化偏置、距离坐标归一化偏置、经度归一化偏置、纬度归一化偏置、方位坐标归一化尺度、距离坐标归一化尺度、经度归一化尺度和纬度归一化尺度;根据方位坐标归一化偏置、方位坐标归一化尺度和第二方位像点坐标计算运动目标的归一化方位像点坐标,根据距离坐标归一化偏置、距离坐标归一化尺度和距离像点坐标计算运动目标的归一化距离像点坐标;根据归一化方位像点坐标和归一化距离像点坐标计算运动目标在大地坐标系下的归一化经度和归一化纬度;根据经度归一化偏置、经度归一化尺度和归一化经度计算第一经度,根据纬度归一化偏置、纬度归一化尺度和归一化纬度计算第一纬度,根据第一经度和第一纬度从数字高程模型中提取运动目标的第一高程。
8.进一步地,根据计算第一经度d
lon1
,其中,l为归一化经度,offset
lon
为经度归一化偏置、scale
lon
为经度归一化尺度;根据计算第一纬度d
lat1
,其中,p为归一化纬度,offset
lat
为纬度归一化偏置、scale
lat
为纬度归一化尺度。
9.进一步地,根据第二方位像点坐标、第一距离像点坐标、径向速度和方位向速度获取运动目标经过预设时间后的第三方位像点坐标和第二距离像点坐标,具体包括:获取星载sar的脉冲重复频率和信号采样频率、光速和运动目标所在距离单元的等效速度;根据脉冲重复频率、等效速度、第二方位像点坐标和方位向速度计算第三方位像点坐标;根据信号采样频率、光速、距离像点坐标和径向速度计算第二距离像点坐标。
10.进一步地,第一大地坐标包括第一经度、第一纬度和第一高程,第二大地坐标包括第二经度、第二纬度和第二高程;根据第一大地坐标和第二大地坐标之间的相对位置矢量计算运动目标的速度矢量,具体包括:获取大地坐标系下,地球椭球模型的长半轴和短半轴;根据第一纬度、第一高程、长半轴和短半轴计算第一地心距;根据第二纬度、第二高程、长半轴和短半轴计算第二地心距;根据第一地心距、第一经度、第一纬度计算运动目标在大地坐标系下的第一直角坐标;根据第二地心距、第二经度、第二纬度计算运动目标在大地坐标系下的第二直角坐标;根据第一直角坐标和第二直角坐标计算相对位置矢量;将相对位
置矢量从大地坐标系转换到北东天坐标系,得到运动目标在北东天坐标系下的速度大小和速度方向。
11.进一步地,根据计算第一地心距r
e1
;根据计算第二地心距r
e2
;其中,d
lat1
为第一纬度,d
lat2
为第二纬度,h
lat1
为第一高程,h
lat2
为第二高程,ea为长半轴,eb为短半轴。
12.进一步地,根据计算第一直角坐标[x1,y1,z1];根据计算第二直角坐标[x2,y2,z2];其中,d
lon1
为第一经度,d
lon2
为第二经度。
[0013]
进一步地,根据计算运动目标在北东天坐标系下的速度大小v
value
;根据计算运动目标在北东天坐标系下的速度方向v
orien
;其中,[
△
x
ne
,
ꢀ△yne
,
ꢀ△zne
] =da
84-ne
[x2‑ꢀ
x1, y2‑ꢀ
y1,z2‑ꢀ
z1],da
84-ne
为大地坐标系到北东天坐标系的坐标系转换矩阵。
附图说明
[0014]
通过以下参照附图对本发明实施例的描述,本发明的上述以及其他目的、特征和优点将更为清楚,在附图中:图1示意性示出了根据本发明实施例的星载sar-gmti运动目标几何定位方法的流程图;图2示意性示出了根据本发明实施例的星载sar-gmti运动目标几何定位的原理
图;图3示意性示出了根据本发明实施例的操作s120的流程图;图4示意性示出了根据本发明实施例的操作s130的流程图;图5示意性示出了根据本发明实施例的操作s140的流程图;图6示意性示出了根据本发明实施例的操作s160的流程图。
具体实施方式
[0015]
为使本发明的目的、技术方案和优点更加清楚明白,以下结合具体实施例,并参照附图,对本发明进一步详细说明。显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0016]
在此使用的术语仅仅是为了描述具体实施例,而并非意在限制本发明。在此使用的术语“包括”、“包含”等表明了所述特征、步骤、操作和/或部件的存在,但是并不排除存在或添加一个或多个其他特征、步骤、操作或部件。
[0017]
在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接或可以互相通讯;可以是直接连接,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
[0018]
在本发明的描述中,需要理解的是,术语“纵向”、“长度”、“周向”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的子系统或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
[0019]
贯穿附图,相同的元素由相同或相近的附图标记来表示。可能导致本发明的理解造成混淆时,将省略常规结构或构造。并且图中各部件的形状、尺寸、位置关系不反映真实大小、比例和实际位置关系。另外,在本发明中,不应将位于括号之间的任何参考符号构造成对本发明的限制。
[0020]
类似地,为了精简本发明并帮助理解各个公开方面中的一个或多个,在上面对本发明示例性实施例的描述中,本发明的各个特征有时被一起分到单个实施例、图或者对其描述中。参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或者多个实施例或示例中以合适的方式结合。
[0021]
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。因此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是至少两个,例如两个、三个等,除非另有明确具体的限定。
[0022]
图1示意性示出了根据本发明实施例的星载sar-gmti运动目标几何定位方法的流
程图。
[0023]
如图1所示,该星载sar-gmti运动目标几何定位方法例如可以包括操作s110~操作s160。
[0024]
在操作s110,获取当前时刻运动目标的第一方位像点坐标、第一距离像点坐标、径向速度和方位向速度。
[0025]
在操作s120,根据第一方位像点坐标和径向速度计算重定位后的第二方位像点坐标。
[0026]
在操作s130,根据第一距离像点坐标和第二方位像点坐标计算运动目标的第一大地坐标。
[0027]
在操作s140,根据第二方位像点坐标、第一距离像点坐标、径向速度和方位向速度获取运动目标经过预设时间后的第三方位像点坐标和第二距离像点坐标。
[0028]
在操作s150,根据第二距离像点坐标和第三方位像点坐标计算运动目标的第二大地坐标。
[0029]
在操作s160,根据第一大地坐标和第二大地坐标之间的相对位置矢量计算运动目标的速度矢量。
[0030]
图2示意性示出了根据本发明实施例的星载sar-gmti运动目标几何定位的原理图。
[0031]
如图2所示,图1所示的星载sar-gmti运动目标几何定位方法,首先,在斜距平面上将运动目标进行重定位,得到一组重定位后的运动目标像点坐标;接着,将径向速度和方位向速度构成的速度矢量,等效为另一组新的像点坐标;然后,利用rpc模型,分别生成两组像点坐标所对应的两组大地坐标,进而得到大地坐标系下的速度矢量;最后,将速度矢量转换到北东天坐标系下,得到运动目标的速度大小和速度方向,进而使得该方法即可以解决运动目标位置几何定位的需求,也可以解决运动目标速度几何定位的需求。
[0032]
在上述操作s110中,可以基于沿航迹干涉(along track interferometry,ati)、相位中心偏置天线(displaced phase center antenna ,dpca)、空时自适应处理(space time adaptive processing,stap)等技术或获取的运动目标的第一方位像点坐标、第一距离像点坐标、径向速度和方位向速度。
[0033]
沿航迹干涉(along track interferometry,ati)、相位中心偏置天线(displaced phase center antenna ,dpca)、空时自适应处理(space time adaptive processing,stap)等技术是星载sar-gmti获得运动目标信息的典型技术。ati技术通过计算两个通道数据之间的干涉相位检测动目标并估计动目标径向速度。dpca技术通过两个通道图像数据之间的相干性消除静止目标、检测动目标,并通过动目标相对位置估计动目标径向速度。stap方法利用空时自适应原理,构建静止场景的空时处理器消除静止目标、检测动目标,并利用导向矢量对动目标径向速度进行搜索估计。ati、dpca、stap技术获得的是运动目标在斜距平面内的位置和速度,投影到单视复图像(slc图像)上,即为运动目标的距离像点坐标、方位像点坐标、径向速度、方位向速度。
[0034]
图3示意性示出了根据本发明实施例的操作s120的流程图。
[0035]
如图3所示,在本发明实施例中,操作s120例如可以包括操作s121~操作s123。
[0036]
在操作s121,根据星载sar-gmti的产品文件计算运动目标所在距离单元的多普勒
调频率。
[0037]
如果产品文件中给出了多个距离单元的多普勒调频率,利用三次样条插值得到运动目标所在距离单元的多普勒调频率。
[0038]
如果产品文件中没有直接给出多普勒调频率,给出了多个距离单元的等效速度、等效斜视角、等效斜距,则首先利用三次样条插值得到运动目标所在距离单元的等效速度v、等效斜视角θ
sq
、等效斜距r
c ,再计算多普勒调频率ka:在操作s122,根据径向速度计算运动目标的多普勒中心频率偏置。
[0039]
可以根据计算多普勒中心频率偏置
△fdc
,其中,vr为运动目标的径向速度,λ为星载sar的波长。
[0040]
在操作s123,基于多普勒调频率和多普勒中心频率偏置对第一方位像点坐标进行重定位,得到第二方位像点坐标。
[0041]
根据对第一方位像点坐标进行重定位,其中,d
line
为第二方位像点坐标,d
line0
为第一方位像点坐标,
△fdc
为多普勒中心频率偏置,ka为多普勒调频率,prf为星载sar的脉冲重复频率。
[0042]
图4示意性示出了根据本发明实施例的操作s130的流程图。
[0043]
在本发明实施例中,可以利用rpc模型,将重定位后的运动目标像点坐标转换为wgs84大地坐标系下的经度、纬度、高程,也即,第一大地坐标例如可以包括第一经度、第一纬度和第一高程。
[0044]
如图4所示,在本发明实施例中,操作s130例如可以包括操作s131~操作s135。
[0045]
在操作s131,提取有理多项式模型对应的文件中的模型参数。
[0046]
在本发明实施例中,模型参数例如可以包括方位坐标归一化偏置、距离坐标归一化偏置、经度归一化偏置、纬度归一化偏置、方位坐标归一化尺度、距离坐标归一化尺度、经度归一化尺度和纬度归一化尺度。
[0047]
在操作s132,根据方位坐标归一化偏置、方位坐标归一化尺度和第二方位像点坐标计算运动目标的归一化方位像点坐标,根据距离坐标归一化偏置、距离坐标归一化尺度和第一距离像点坐标计算运动目标的归一化距离像点坐标。
[0048]
在本发明实施例中,可以根据计算归一化方位像点坐标d
line_norm
,其中,d
line
为第二方位像点坐标,offset
line
为
方位坐标归一化偏置,scale
line
为方位坐标归一化尺度。
[0049]
可以根据计算归一化距离像点坐标d
samp_norm
,其中,d
samp
为第一距离像点坐标,offset
samp
为距离坐标归一化偏置,scale
samp
为距离坐标归一化尺度。
[0050]
在操作s133,根据归一化方位像点坐标和归一化距离像点坐标计算运动目标在大地坐标系下的归一化经度和归一化纬度。
[0051]
在本发明实施例中,可以通过建立运动目标的归一化像点坐标和归一化大地坐标(经度、纬度、高程)之间的转换关系,数值计算得到归一化大地坐标。
[0052]
建立归一化方位像点坐标和归一化大地坐标之间的转换关系例如可以为:分子多项式为:分母多项式为:建立归一化距离像点坐标和归一化大地坐标之间的转换关系例如可以为:分子多项式为:分母多项式为:其中,l为运动目标的归一化经度,p为运动目标的归一化纬度,h为运动目标在大地坐标系下的高程,[a0,
∙ꢀ∙∙
,a
19
]为rpc模型中方位像点坐标转换大地坐标的分子多项式系数,[b0,
∙ꢀ∙∙
,b
19
]为rpc模型中方位像点坐标转换大地坐标的分母多项式系数,[c0,
∙ꢀ∙∙
,c
19
]为rpc模型中距离像点坐标转换大地坐标的分子多项式系数,[d0,
∙ꢀ∙∙
,d
19
]为rpc模型中距离像点坐标转换大地坐标的分母多项式系数。
[0053]
通过求解上述即可得到运动目标在大地坐标系下的归一化经度和归一化纬度。
[0054]
在操作s134,根据经度归一化偏置、经度归一化尺度和归一化经度计算第一经度,
根据纬度归一化偏置、纬度归一化尺度和归一化纬度计算第一纬度,根据第一经度和第一纬度从数字高程模型中提取运动目标的第一高程。
[0055]
在本发明实施例中,可以根据计算第一经度d
lon1
,其中,l为归一化经度,offset
lon
为经度归一化偏置、scale
lon
为经度归一化尺度;可以根据计算第一纬度d
lat1
,其中,p为归一化纬度,offset
lat
为纬度归一化偏置、scale
lat
为纬度归一化尺度。
[0056]
在操作s135,根据第一经度和第一纬度从数字高程模型中提取运动目标的第一高程。
[0057]
图5示意性示出了根据本发明实施例的操作s140的流程图。
[0058]
在本发明实施例中,可以根据运动目标像点坐标和速度矢量,构建一组新的像点坐标。新的像点坐标相当于运动目标经过单位时间后到达的像点坐标。
[0059]
如图5所示,在本发明实施例中,操作s140例如可以包括操作s141~操作s143。
[0060]
在操作s141,获取星载sar的脉冲重复频率和信号采样频率、光速和运动目标所在距离单元的等效速度。
[0061]
在操作s142,根据脉冲重复频率、等效速度、第二方位像点坐标和方位向速度计算第三方位像点坐标。
[0062]
可以根据计算第三方位像点坐标d
line1
,v为运动目标所在距离单元的等效速度,prf为星载sar的脉冲重复频率,va为方位向速度。
[0063]
在操作s143,根据信号采样频率、光速、距离像点坐标和径向速度计算第二距离像点坐标。
[0064]
可以根据计算第二距离像点坐标d
samp1
,fs为信号采样频率,c为光速,vr为径向速度。
[0065]
在上述操作s150中,利用rpc模型,将新的运动目标像点坐标转换为wgs84大地坐标系下的经度、纬度、高程。转换过程与操作s130相同,将d
line
和d
samp
分别替换为d
line1
和d
samp1
。即可得到新的归一化像点坐标,进而计算得到第二经度d
lon2
和第二纬度d
lat2
,再依据第二经度d
lon2
和第二纬度d
lat2
从数字高程模型中提取运动目标的第二高程。第二高程与第一高程近似相等。
[0066]
图6示意性示出了根据本发明实施例的操作s160的流程图。
[0067]
如图6所示,在本发明实施例中,操作s160例如可以包括操作s161~操作s164。
[0068]
在操作s161,获取大地坐标系下,地球椭球模型的长半轴和短半轴。
[0069]
在操作s162,根据第一纬度、第一高程、长半轴和短半轴计算第一地心距,根据第二纬度、第二高程、长半轴和短半轴计算第二地心距。
[0070]
在本发明实施例中,可根据计算第一地心距r
e1
。
[0071]
可以根据计算第二地心距r
e2
。其中,d
lat1
为第一纬度,d
lat2
为第二纬度,h
lat1
为第一高程,h
lat2
为第二高程,ea为长半轴,eb为短半轴。
[0072]
在操作s163,根据第一地心距、第一经度、第一纬度计算运动目标在大地坐标系下的第一直角坐标,根据第二地心距、第二经度、第二纬度计算运动目标在大地坐标系下的第二直角坐标。
[0073]
在本发明实施例中,可以根据计算运动目标在wgs84大地坐标系下第一直角坐标[x1,y1,z1]。
[0074]
可以根据计算运动目标在wgs84大地坐标系下第二直角坐标[x2,y2,z2]。
[0075]
在操作s164,根据第一直角坐标和第二直角坐标计算相对位置矢量;将相对位置矢量从大地坐标系转换到北东天坐标系,得到运动目标在北东天坐标系下的速度大小和速度方向。
[0076]
在本发明实施例中,运动目标从原像点坐标到新像点坐标的相对位置矢量[
△
x
84
,
ꢀ△y84
,
ꢀ△z84
] = [x2‑ꢀ
x1, y2‑ꢀ
y1,z2‑ꢀ
z1],该矢量代表的是运动目标在wgs84大地坐标系下的速度矢量。
[0077]
可以将速度矢量从wgs84大地坐标系转换到北东天坐标系下。在北东天坐标系下,z轴指北、y轴指东、x轴满足右手螺旋法则。
[0078]
可以根据计算运动目标在北东天坐标系下的速度大小v
value
;可以根据
计算运动目标在北东天坐标系下的速度方向v
orien
。
[0079]
其中,[
△
x
ne
,
ꢀ△yne
,
ꢀ△zne
] =da
84-ne
[x2‑ꢀ
x1, y2‑ꢀ
y1,z2‑ꢀ
z1],da
84-ne
为大地坐标系到北东天坐标系的坐标系转换矩阵。da
84-ne
例如可以如下式:综上所述,本发明实施例提供的星载sar-gmti运动目标几何定位方法将星载sar-gmti运动目标径向速度和方位向速度转换为像点坐标,使得rpc模式即可以解决运动目标位置几何定位的需要,也可以解决运动目标速度几何定位的需求。
[0080]
以上所述的具体实施例,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1