一种带水下旋转摄像头的漂浮式水下探测装置及方法与流程
1.本发明涉及水下图像采集和探测技术领域,具体涉及一种带水下旋转摄像头的漂浮式水下探测装置及方法。
背景技术:
2.水下环境探测的需求广泛,包括水文地理考察、打捞、钓鱼探鱼等,因水对电磁波的吸收较强,因此目前许多水下探测装置采用超声波进行位置和图像的采集,使用最为广泛的是声呐。声呐设备难以做到精准探测,声呐能做到较为精准的定距,但在图像采集上只能得到模糊的合成图像,容易造成误判。为采集水下图像,通常是将摄像头安装在水下机器人上,通过机器人的前进后退、上潜下浮等姿态的调整来采集图像或者拍摄视频,使用不便。因此,亟需开发一种可以独立在机器人以外的摄像头,无需依靠机器人姿态调整就能进行图像的采集,从而实现水下图像的快速和精准采集。
技术实现要素:
3.本发明的目的在于提供一种带水下旋转摄像头的漂浮式水下探测装置及方法,解决现有设备只能合成模糊图像易误判、或依靠机器人姿态调整进行采集费时费力的问题。
4.为解决上述的技术问题,本发明采用以下技术方案:一种带水下旋转摄像头的漂浮式水下探测装置,其特征在于:包括通过线缆连接水面船体和水下旋转摄像头,所述水面船体内部设置有控制电路、电动绕线器、声呐,线缆缠绕在电动绕线器上,水面船体下部外侧设置有推进器;所述水下旋转摄像头包括摄像头组件,摄像头组件两侧转动连接在镜头支架上,镜头支架一侧设置有俯仰电机,俯仰电机驱动摄像头组件竖向转动;镜头支架顶部与水平电机固定连接,水平电机驱动摄像头组件水平转动;水平电机与电机支架固定连接,电机支架顶部与控制舱盖连接,控制舱盖底部开口,电机支架顶部与控制舱盖之间的空间形成控制舱,控制舱内还设置有控制电路;所述摄像头组件和镜头支架外侧壁套设有透明罩,透明罩顶部与控制舱盖密封连接;控制舱盖顶部外侧壁设置有灯带组件,控制舱盖顶部通过水密插接件与线缆连接。
5.更进一步的技术方案是所述镜头支架包括支架底板,支架底板通过轴套与水平电机驱动轴固定,支架底板两侧向下延伸有支架轴臂,支架轴臂上开设有孔,支架轴臂之间转动设置有摄像头组件,其中一个支架轴臂外侧固定有俯仰电机,俯仰电机驱动轴穿过孔与摄像头组件连接;支架轴臂外侧卡接有支架护板。
6.更进一步的技术方案是所述支架底板两侧向上延伸有支架挡板,支架挡板内侧壁上设置有v型卡槽,控制舱盖底部向下延伸有楔形限位块,楔形限位块与v型卡槽适配。
7.更进一步的技术方案是所述电机支架的底部向下凹形成电机固定槽,电机固定槽内固定水平电机,电机固定槽外一侧固定有fpc排线转接板,fpc排线转接板与fpc排线一端连接,fpc排线另一端与摄像头组件连接。
8.更进一步的技术方案是所述电机固定槽外侧套接有fpc排线挡架,fpc排线挡架为
中空圆柱状,fpc排线挡架顶部向外延伸,fpc排线缠绕在fpc排线挡架外侧。
9.更进一步的技术方案是所述灯带组件包括固定环,固定环侧壁倾斜30
°
~60
°
,固定环外侧壁上沿径向均匀分布有6~10个灯珠,固定环与灯珠外包裹有密封胶层。
10.更进一步的技术方案是所述摄像头组件包括相互盖合的摄像头前盖和散热后盖,镜头固定在摄像头前盖内,摄像头前盖和散热后盖合围的空间内还设置有电路板,摄像头前盖和散热后盖均设置有限位凸起,限位凸起与镜头支架相适配。
11.更进一步的技术方案是所述水面船体船艉分水线处设置有挂钩,挂钩扣接固定装置,固定装置上设置有辅助探测设备。
12.更进一步的技术方案是所述装置的探测方法包括如下步骤:s1.将水面船体放入水里,推进器驱动其行进,结合声呐返回数据,确定目标位置,将水面船体悬停在目标位置;s2.电动绕线器下放水下旋转摄像头至目标水深处,控制电路通过线缆输出指令给水下旋转摄像头;俯仰电机驱动摄像头组件竖向转动,水平电机驱动摄像头组件水平转动,对目标水深处的环境进行全方位的图像采集;s3.图像经水下旋转摄像头控制电路解析后,通过线缆传送给水面船体。
13.更进一步的技术方案是所述水面船体的控制电路上设置有gps模块、无线通讯模块;水下旋转摄像头上设置有温度传感器,控制电路上设置有录音模块。
14.与现有技术相比,本发明的有益效果是:1.将水下旋转摄像头通过线缆搭载在水面船体上,通过推进器驱动水面船体快递行进,通过声呐确定水面上的目标位置,通过电动绕线器下放水下旋转摄像头到指定水深处,通过水平电机和俯仰电机实现摄像头组件在水下全方位的采集图像,无需通过水下机器人姿态调整就能采集图像,图像采集方便快捷,通过图像结合声呐数据,大大提升水下环境探测的精度。
15.2.通过支架轴臂对俯仰电机进行固定,通过支架底板与水平电机连接,通过透明罩与控制舱盖的密封连接实现摄像头组件及控制电路的水下密封,通过灯带组件进行照明,提高采集图像的清晰度。
16.3.通过fpc排线连接摄像头组件,利用其较柔软的特性,避免其在摄像头组件转动过程中连接电线被拉断;通过fpc排线挡板将fpc排线缠绕两到三圈,进一步提高变形余量,进一步避免其被拉断或拉变形。通过v型卡槽和楔形限位块限制摄像头组件水平转动的位置,当其沿顺时针方向转动到限位处,就沿逆时针方向转回来,避免连接摄像头组件的电线被拉断。
附图说明
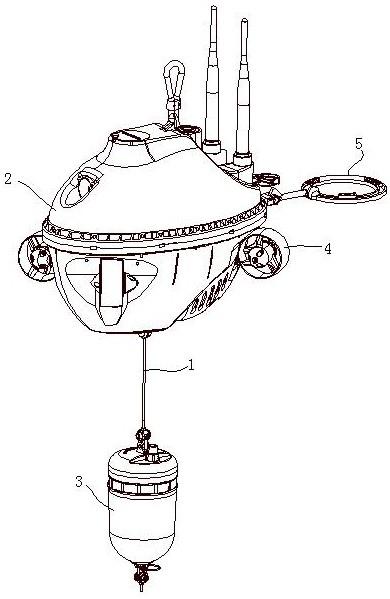
17.图1为本发明的结构示意图。
18.图2为本发明中水下旋转摄像头的结构示意图。
19.图3为本发明中水下旋转摄像头去除透明罩后的结构示意图。
20.图4为本发明中水下旋转摄像头的装配示意图。
21.图5为本发明中镜头支架的结构示意图。
22.图6为本发明中控制舱盖的结构示意图。
23.图7为本发明中电机支架与fpc排线挡架的结构示意图。
24.图8为本发明中摄像头组件的结构示意图。
25.图中:1-线缆,2-水面船体,3-水下旋转摄像头,301-摄像头组件,3012-摄像头前盖,3013-散热后盖,3014-限位凸起,302-镜头支架,3021-支架底板,3022-支架轴臂,3023-支架护板,3024-支架挡板,3025-v型卡槽,303-俯仰电机,304-水平电机,305-电机支架,3051-电机固定槽,306-控制舱盖,3061-楔形限位块,3062-第一吊挂部,307-透明罩,3071-第二吊挂部,308-灯带组件,3081-固定环,3082-灯珠,309-轴套,310-fpc排线转接板,311-fpc排线挡架,312-密封圈,313-压环,314-穹顶盖,4-推进器,5-固定装置。
具体实施方式
26.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
27.图1示出了一种带水下旋转摄像头的漂浮式水下探测装置,包括通过线缆1连接水面船体2和水下旋转摄像头3。其中水面船体2漂浮在水面上,内部设置有控制电路、电动绕线器、声呐,控制电路上设置有gps模块、无线通讯模块等。为便于其快速行进,水面船体2下部外侧设置有四个推进器4,四个推进器4布局前后对称、左右对称,每个推进器4轴线与对称面夹角为10
°
~45
°
,使得水面船体2可以快速实现前进、后退、转弯、侧移和悬停。电动绕线器控制线缆1的下放和回收。为便于辅助设备的搭载,水面船体2船艉分水线处设置有挂钩,挂钩扣接固定装置5,固定装置5为圆环状,且表面设置有固定孔位,可以搭载如打窝船、图像声呐、水质检测装置等。
28.水下旋转摄像头如图2-4所示,包括摄像头组件301,如图8所示,为便于装配,摄像头组件301包括相互卡接的摄像头前盖3012和散热后盖3013,镜头固定在摄像头前盖3012内,摄像头前盖3012和散热后盖3013合围的空间内还设置有电路板,摄像头前盖3012和散热后盖3013均设置有限位凸起3014,限位凸起3014与镜头支架302相适配。散热后盖3013外壁上设置有散热片。摄像头组件301一侧通过轴承与支架轴臂3022上的孔连接,摄像头组件301另一侧与俯仰电机303的驱动轴连接。
29.所示镜头支架如图5所示,包括支架底板3021,支架底板3021通过轴套309与水平电机304驱动轴固定,支架底板3021左右两侧向下延伸有支架轴臂3022,支架轴臂3022上开设有孔,支架轴臂3022之间转动设置有摄像头组件301,其中一个支架轴臂3022外侧固定有俯仰电机303,支架底板3021前后两侧向上延伸有支架挡板3024,支架挡板3024内侧壁上设置有v型卡槽3025,控制舱盖306底部向下延伸有楔形限位块3061,楔形限位块3061与v型卡槽3025适配。支架轴臂3022两侧外卡接有支架护板3023,支架护板3023和支架轴臂3022、支架挡板3024的外侧壁配合后呈圆弧形,便于透明罩307的装配。
30.如图7所示,所述电机支架305的底部向下凹形成电机固定槽3051,电机固定槽3051内固定水平电机304,电机固定槽3051与水平电机304的外形相适应,截面为矩形,底部开孔。水平电机304驱动轴朝下穿过电机固定槽3051并固定在槽内。水平电机304上固定有轴套309,轴套309底部与支架底板3021顶部固定,这样水平电机304驱动下,整个镜头支架302都会来回转动。电机支架外套接有fpc排线挡架311,fpc排线挡架311为中空圆柱状,一
侧为给fpc排线转接板310让位为平面,fpc排线挡架311顶部向外延伸,fpc排线缠绕在fpc排线挡架311外侧,一般绕2-3圈,fpc排线一端与摄像头组件301内的电路板连接,另一端与fpc排线转接板310连接。
31.如图4、6所示,所述控制舱盖306为底部开口的筒状,电机支架305顶部与控制舱盖306连接,电机支架305顶部与控制舱盖306之间的空间形成控制舱,控制舱内还设置有控制电路。控制舱盖306外侧壁底部设置有密封圈312,透明罩307顶部套接在控制舱盖306底部,且透明罩307外侧壁套接有压环313,压环313与控制舱盖306外侧壁螺纹连接,透明罩307将摄像头组件301和镜头支架302及其装配的零部件罩在里面。通过压环313与控制舱盖306的螺纹锁紧,同时将透明罩307与控制舱盖306底部压紧,结合密封圈312实现密封,避免水进入透明罩307内损坏内部的零部件。
32.为便于状态,所述控制舱盖306顶部设置有水密插接件,控制舱盖306顶部向外延伸有第一吊挂部3062,透明罩307底部向外延伸有第二吊挂部3071,水密插接件与线缆1连接。第一吊挂部3062便于将水下旋转摄像头3通过线缆1与水面船体2连接,而第二吊挂部3071可以悬挂铅块等配重物或者搭载取样装置等,使得水下旋转摄像头3在水里保持竖向位置,或者便于在一定深度进行采样等。所述控制舱盖306顶部卡接有穹顶盖314,穹顶盖314有一定的防尘作用。
33.为便于清晰拍摄,控制舱盖306顶部外侧壁设置有灯带组件308,灯带组件308包括固定环3081,固定环3081侧壁倾斜30
°
~60
°
,固定环3081外侧壁上沿径向均匀分布有6~10个灯珠3082,可覆盖摄像头的整个观测区域。固定环3081与灯珠3082外包裹有密封胶层,通过灌胶工艺将两者进行密封,然后在通过胶粘等工艺固定在控制舱盖306顶部。固定环3081倾斜设置,可减少水及其杂质对灯光的反射;灯珠3082环绕均布,可使灯光分布更加均匀。灯珠3082选用黄光,黄光穿透性好,且经过测试不会惊扰鱼群。
34.使用时,将线缆1通过固定线缆的装置与第一吊挂部3062固定,将水下旋转摄像头3固定在水面船体2的电动绕线器上,水密插接件实现线缆1与水面船体2之间的数据和信号传送。
35.将水面船体2放入水里,推进器4驱动其行进,结合声呐返回数据,确定目标位置,将水面船体2悬停在目标位置;电动绕线器下放水下旋转摄像头3至目标水深处,控制电路通过线缆1输出指令给水下旋转摄像头3;俯仰电机303驱动摄像头组件301竖向转动,水平电机304驱动摄像头组件301水平转动,对目标水深处的环境进行全方位的图像采集;还可设置imu姿态解算模块,使摄像头竖直姿态稳定在某一角度;还可设置图像特征识别算法,控制摄像头自动追踪目标。
36.图像经水下旋转摄像头3控制电路解析后,通过线缆1传送给水面船体2。水下旋转摄像头3上可设置温度传感器进行水温的测量,可设置深度传感器进行水深的测量,可设置录音传感器对水下声音等进行录制。
37.水平转动时,摄像头组件301顺时针转动,当v型卡槽3025与楔形限位块3061卡接时,摄像头组件301逆时针转动,直到v型卡槽3025与楔形限位块3061再次卡接,摄像头组件301再顺时针转动。俯仰电机303驱动摄像头组件301上下来回转动,摄像头组件301向上转动,当限位凸起3014与镜头支架302触碰后,摄像头组件301向下转动,直到限位凸起3014与
镜头支架302再次触碰后,摄像头组件301再向上转动,实现全方位的图像采集。
38.具体地:1.在水面船体2的固定装置5上搭载打窝船,上述装置的工作流程如下:先通过安装在水面船体2内的定距声呐测定鱼群水层深度及方向,当探测到目标,其特征与鱼群特征相匹配时,控制电路通过gps方位及定距声呐探测的水层深度及立体方位角,推算出鱼群与水面船体2的距离及水平方位角,驱动推进器4,使水面船体2行进到目标位置并悬停,然后下放水下旋转摄像头3到目标水层进行精准观察并记录鱼群位置点。重复以上操作可发现多个鱼群位置来判定最佳打窝和做钓位置;操作者控制水面船体2行驶至确定的钓点位置后,再将水下旋转摄像头3下放至目标位置水底,或某个既定深度,控制水下旋转摄像头3进行垂直俯仰、水平旋转,通过实时图像观测目标位置的环境及鱼群。还可以通过水面搭载的设备释放钓鱼钩组辅助钓鱼。
39.2.在水面船体2的固定装置5上搭载图像声呐或漂浮指示灯进行协助水下打捞,上述装置的工作流程如下:通过安装在水面船体2内的定距声呐探测水深,快速对目标水域范围进行粗略探测,排除可能性小的水域,缩小搜寻范围,再在缩小后的搜寻范围内同时开启定距声呐与图像声呐,根据图像声呐生成的点阵图像,设定若干疑似目标位置,操纵水面船行驶至疑似目标位置,下放水下旋转摄像头3到水底,根据实时图像传输确定打捞目标,利用水面船体内gps模块所有确认的打捞目标,引导打捞船只至打捞目标位置进行打捞作业。也可以开启漂浮指示灯来引导打捞船至目标位置。
40.尽管这里参照本发明的多个解释性实施例对本发明进行了描述,但是,应该理解,本领域技术人员可以设计出很多其他的修改和实施方式,这些修改和实施方式将落在本技术公开的原则范围和精神之内。更具体地说,在本技术公开、附图和权利要求的范围内,可以对主题组合布局的组成部件或布局进行多种变形和改进。除了对组成部件或布局进行的变形和改进外,对于本领域技术人员来说,其他的用途也将是明显的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1