一种无源超声波雷达测距系统的制作方法
1.本发明专利涉及一种可实现无源测距的车载用品,特别涉及一种不需要蓄电池和外部电源供电,就能将探头和障碍物之间的距离数据无线传送给显示主机的无源超声波雷达测距系统。
背景技术:
2.市面上在售的小汽车基本上都自带雷达测距功能,以提供倒车辅助和行车车距预警,一般是车前车后各安装4个雷达探头,但车辆侧面的一些盲区位置并没有探头,并且只有一些高档车型才提供车距的数据显示,大多数的车还只是靠“嘀嘀”声的频率预警不同的车距。当有些车主想要在盲区位置增加雷达探头传感器时,又会面临以下几个缺点:1、有线传感器车内布线不方便,甚至需要破坏性改装车辆;2、有线传感器供电需要点烟口提供额外的电源接口;3、传感器如果选用电池供电,又存在电池自燃和充电不便等问题。
3.因此,需要一种无源超声波雷达测距系统,它不需要电池和外部电源供电,依靠自身装置搜集所需能量避免了车内布线,能够自动通过超声波将车距数据测出并无线传送给显示主机显示,没有蓄电池也就没有电池高温下自燃的风险,经过特殊设计的电量搜集电路,供电电路以及周期性触发测距电路,最大限度地降低了系统测距工作时的电量损耗,满足全天候使用的需要。
4.发明专利内容
5.(一)要解决的技术问题
6.为了解决现有的上述问题,本发明专利提供一种无源超声波雷达测距系统,该系统需解决以下几个技术问题:1、测距传感器的电能来源不能使用蓄电池和外部电源供电,必须自带能量收集装置;2、为保证系统尽可能低的工作功耗,无线模块不能一直工作在发送状态,满足需求的前提下需具备周期性触发功能;3、无源测距仪需采用脉冲式供电方式,能根据供电电压的高低,自动控制供电电路的通和断,以有限的电量保证系统正常工作的时长;4、测距数据需通过无线传输的方式传送给显示主机显示出来;5、能量回收途径需多样化,尽可能地满足多场景全天候的使用需求。
7.(二)技术方案
8.为了达到上述目的,本发明专利采用的技术方案如下:
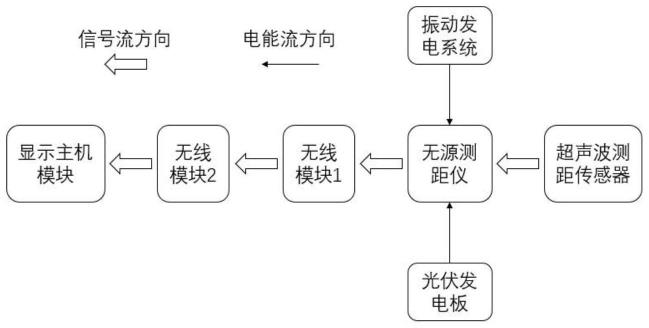
9.一种无源超声波雷达测距系统,它包括无源测距仪和显示主机,按功能模块划分主要包含:振动发电系统,光伏发电板,供电管理电路,超声波测距系统,无线传输模块,tft液晶显示屏,mcu主板,结构外壳等;
10.所述振动发电系统,主要是由弹簧电磁振子,电量收集电路组成,光伏发电板辅助收集光伏电能。结构经过特殊设计的弹簧电磁振子,能够将切割磁感线区域压缩成一个磁场强度较强的环形区域,当振子在外力作用下振动时,该环形区域穿过固定的线圈和磁环,由电磁感应原理形成感应电流;电量收集电路是采用基于ltc3588芯片组成的微电量收集电路,属于低损耗全波桥式整流电路,具备高效降压输出功能,这里只使用其电量收集功
能;弹簧电磁振子含有浮球结构,用于车辆行驶时,风引发漩涡脱落而迫使振子发生振动,设计时风引起的振动频率范围与整车模态匹配频率范围一致。
11.所述供电管理电路,是由ht7050a过压保护芯片,tl431稳压二极管以及其他元件共同组成,主要的功能作用是:1、充电过程中,只有当供电电压高于5v时,电路才打开对应三极管开关从法拉电容开始给vcc供电;2,供电开始后,随着电能消耗,即使电压低于5v,供电仍不中断,只有当供电电压低于系统正常工作最小电压3.1v,才开始关闭后端q3三极管,切断电路供电;3,当法拉电容端cap+低于3.0v时,再切断前端q1三极管,这样通过切断前后两个三极管开关,能最大限度地减小电路的电能损耗;4,当电容充电达到一定水平后,会依次再打开q1,q3三极管,再次恢复对后端电路的供电。这种供电管理方式不仅能够减小电能损耗,也能够最大限度地保证系统的正常工作时间。
12.所述超声波测距系统,采用的aj-sr04模块,属于防水性收发一体超声波测距模块,通过每次发送8个40k超声波测量障碍物的距离,工作电压3-5v,模块串联固定阻值电阻能使系统工作在串口触发模式。系统周期性雷达测距电路采用的是基于lm358运算放大器所设计的周期触发电路,周期时长由电容和电阻的大小决定,触发工作时长为1/3t,按设计一个周期t≈1.6s;
13.所述无线传输模块,选用的是hc-12无线透传模块,不需任何外部指令驱动即可通过串口透传数据,工作电压3.2-5.5v,工作频率433mhz,最大传输距离1000米,支持多发一收的组网模式。
14.所述显示主机,主要是基于stm32f103单片机系统开发的数据收发主机,用以实现接收无线模块传送的距离数据,以及驱动tft液晶显示屏,将距离数据在液晶屏上显示出来。
15.所述无源测距仪结构采用防水设计,安装方式可使用螺钉或钢带喉箍固定在车辆上;显示主机采用三棱体结构设计,内置2.4寸tft液晶屏,mcu系统,无线模块,播放喇叭,可通过橡胶垫的背胶固定在驾驶台上。
16.(三)有益效果
17.本发明专利的有益效果在于:不需要蓄电池或额外布线供电,依靠自身的能量收集装置就能满足系统自身的运行,没有电池自燃风险;测距数据通过无线模块发送,不需要在车内布置通信线缆;通过特殊的供电管理电路和周期性触发电路设计,提高了系统正常工作时长并最大限度降低电能在线路损耗;能量回收途径多样化,从车辆低速行驶的振动,白天的太阳能以及高速行驶时风引起的振子振动,这3个途径获取能量;测距数据能够由显示主机在液晶屏上显示出来;所设计无源测距仪随着车速的不同,振动频率范围与常规整车模态匹配频率范围一致;无源测距仪安装方式灵活,可采用螺钉固定也可使用钢带喉箍固定。所述无源超声波雷达测距系统,旨在实现测距系统的无源使用,摆脱线缆和电池的束缚,以更安全,更灵活的方式为车辆增加盲区测距预警功能,为安全驾驶保驾护航。
附图说明
18.图1为本发明专利实施例的功能模块结构图;
19.图2为本发明专利实施例的无源测距仪应用场景图;
20.图3为本发明专利实施例的振动发电系统原理图;
21.图4为本发明专利实施例的显示主机结构示意图;
22.图5为本发明专利实施例的无源测距仪外部结构图;
23.图6为本发明专利实施例的无源测距仪内部构造图;
24.图7为本发明专利实施例的电能收集电路原理图;
25.图8为本发明专利实施例的供电管理电路原理图
26.图9为本发明专利实施例的脉冲式工作电压分析图
27.图10为本发明专利实施例的周期性雷达测距电路原理图
28.图11为本发明专利实施例的显示主机电路原理图
29.附图标记说明:1、tft液晶屏,2、主机外壳,3、电源开关,4、带背胶橡胶垫,5、播放喇叭,6、无线传输模块2,7、mcu主板,8、光伏发电板,9、光伏板支架,10、无源测距仪上盖,11、振子浮球,12、超声波探头,13、无源测距仪下壳体,14、安装支架,15、弹簧,16、振子外腔体,17、磁铁腔体,18、磁环,19、发电线圈,20、浮球连接杆,21、aj-sr04测距模块,22、线缆防水pg头,23、线圈固定环,24、无源测距仪主板,25、无线传输模块1,26、强磁永磁铁。
具体实施方式
30.为了更好的解释本发明专利,下面结合附图,对本发明专利实施例中的技术方案进行清楚、完整地描述。
31.参见附图2,一种无源超声波雷达测距系统,其无源测距仪可安装在车辆底盘上,当车辆行驶时,风会引起浮球的上下振动。设计选定浮球外径50mm,依据风的雷诺数计算公式,re=ρvd/η,其中ρ,v,d,η分别为流体密度,流速,直径,粘度,这里v取值10-70km/h对应车速,再依据风漩涡脱落频率公式f=0.198v(1-19.7/re)/d,计算出来当车速10km/h时,振动频率约11hz,车速70km/h时,振动频率约76.8hz。根据可查的常规车辆整车模态匹配频率范围是10-80hz,因此设计可满足车辆模态匹配频率范围。
32.参见附图3,无源测距仪振动发电系统原理简图,将两块同极相对,外径25mm的磁铁约束在磁铁腔体内,通过结构的外力压缩从而形成一个磁力线极度密集的环形区域。在环形区域外围,固定着发电线圈,磁环,当振子运动时,磁力线密集的环形区域穿过线圈,由电磁感应原理产生感应电流,从而将振子振动的能量转化为电能收集起来。关于振子详细的内部结构可参照图6,磁铁腔体两端设置有不锈钢弹簧,从而组成弹簧振子结构,振子质量约为435g,弹簧的弹力系数k约为0.5n/mm,根据弹簧振子周期公式t=2π√(m/k)评估其固有频率为6hz,车辆在不平路面上行驶时,车子振动频率范围为0.5-25hz,而6hz的固有频率也是落在振动频率范围内,能有效提高收集振动能量的效率。
33.参见附图4,显示主机的结构图,基于stm32f103单片机系统开发的显示主机,主要包含tft液晶显示屏,mcu主板,播放喇叭,无线传输模块,主机外壳等组成。主机外壳按设计由钣金件折弯,镂空,焊接形成一个三棱体腔体,各功能组件安装在内,侧边板由沉头螺丝固定密封;底部4个橡胶垫内含有螺钉,从下往上将外壳和mcu主板固定在一起,橡胶垫包裹螺钉主要是为了隐藏螺钉和防滑;内部各主要部件均设计支架固定在外壳上。显示主机的外形尺寸为74
×
62
×
65mm,其各部件的名称参见附图标记说明。
34.参见附图5,附图6,分别为无源测距仪的外部结构图,内部构造图,无源测距仪外部尺寸为130
×
138
×
66mm,各组件的名称参见附图标记说明。零件8为光伏发电板,通过零
件9光伏板支架和4个螺钉固定在外壳上,支架镂孔是为了减小遮光面;零件14为安装支架,也是通过4颗螺钉固定,螺钉孔位与光伏板支架的孔位完全一致,安装时二者可互换安装位置,安装支架的设计能同时满足钢带喉箍抱装和螺钉固定安装,适应复杂的安装场景;测距探头的线缆通过防水pg头接入测距仪内部,整体结构ipx5防水设计;零件15为不锈钢弹簧,弹簧安装在磁铁腔体两端,从而形成弹簧电磁振子,不锈钢具有弱磁性,一端压缩时另一端是自由状态吸附在磁铁腔体上,属于单弹簧振子模型;零件11为塑料振子浮球,通过零件20连接杆与弹簧电磁振子连为一体,主要功能是吸收行驶中的风能转化为振动能量;零件23为线圈固定环,将19电磁感应发电线圈和18磁环固定在一起,根据磁场方向总是倾向于磁阻低的路径分布的原理,因此磁环能进一步引导磁力线穿过线圈,增加线圈切割磁力线的概率,提升效率;24无源测距仪主板和25无线传输模块1固定在非金属壳体内,主要功能是处理数据和无线传输数据。
35.参见附图7,电能收集电路原理图,是基于ltc3588芯片组成的微电量收集电路,从电磁感应发电线圈和光伏发电板获取微量电能后,持续存储到1.5f的cap法拉电容里面,电路中d3肖特基二极管的作用是防止电流倒灌入发电板。ltc3588集成了一个低损失全波桥式整流器和一个高效率降压型转换器,是一款专为高输出阻抗能源而优化的能量收集解决方案,但是其输入输出所需的压降还是比较大,实验数据显示,正常输出3.3v,最低需要5.15v的输入电压,因此对我们的无源低能耗系统并不适用,这里只使用其电量收集功能,输出功能需要设计特殊电路,这在后面的段落详细讲解。
36.参见附图8和附图9,分别为供电管理电路原理图和脉冲式工作电压分析图,当cap法拉电容开始充电,电压达到3.0v时,d1稳压二极管导通,从而使前端的q1三极管导通;cap电压继续升高到5.5v,vdd电压达到阈值,从而使vout端高阻抗输出1.2v,通过r5限流使q2三极管打开,进而控制后端的q3三极管导通,由电压分析图可知,开始进入工作区,给后端工作电路供电;后端开始供电后,只要输出电压高于3.1v,d2稳压二极管会一直打开,从而维持后端q3三极管保持导通状态;当电量继续消耗,使vcc输出电压下降到3.1v以下时,此时d2稳压二极管关闭进而使后端q3三极管关闭,进入断电区断开对后端电路的供电,此时整体电路仍会有部分电量漏出;当cap法拉电容里的电量继续消耗后,电压低于3v时,d1稳压二极管关闭,进而使前端的q1三极管也关闭,通过关闭前端和后端两处电路,从而最大限度减小电路的漏电流,达到节省电量的目的;当cap法拉电容电量不断积累又达到5.5v时,会重复前面的过程,周而复始循环工作。
37.参见附图10,周期性雷达测距电路,其原理是基于lm358运算放大器所设计的周期触发电路,图中的电阻r10=r11=r12。一开始,r10和r11之间的同相输入点处电压为1/2vcc,而放大器反相输入点电压为0,故放大器输出vcc,此时的电路是r10和r12并联后,再与r11串联;接着放大器输出节点通过r13给电容c4充电,此时放大器反相输入点电压从0开始上升,而同相输入点电压则是从1/2vcc向2/3vcc变化,当同相输入点电压《反相输入点电压后,放大器输出则反转为0v,此时的电路是r11和r12并联,然后再与r10串联,电容c4开始通过r13放电;当同相输入点电压从2/3vcc变为1/3vcc,反相输入点电压也通过放电后变为1/3vcc,再进一步变小后使同相输入点电压》反相输入点电压时,则放大器输出又从0反转为vcc。周期性电路正是通过这种不断的充放电过程,使放大器输出端电压不断地在0v和vcc之间周期性反转,从而控制pnp三极管q4不断地打开和关闭,周期性控制雷达传感器发
送数据给无线模块1,1/3的周期时间发送数据。图中r9为选择电阻,用以选择雷达传感器模块的工作模式为串口触发模式。
38.参见图11,显示主机电路原理图,主要是基于stm32f103单片机系统开发的数据收发主机,电路图主要支持单片机系统正常工作的电路,用以实现接收无线模块传送的距离数据,以及驱动tft液晶显示屏,将距离数据在液晶屏上显示出来。
39.本发明专利总的工作原理是:根据光伏发电和电磁感应原理,通过特殊的振动发电装置和电量收集电路将电能收集在法拉电容里,经过特殊设计的供电管理电路和周期性触发电路,尽可能地降低系统工作的电路损耗,最终将数据通过无线模块传输给显示主机,在液晶屏上将距离数据显示出来。
40.本发明专利的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明专利内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1