一种精密获取GNSS反射信号初相的方法与装置
一种精密获取gnss反射信号初相的方法与装置
技术领域
1.本发明涉及gnss-r遥感领域,特别是涉及一种精密获取gnss反射信号初相的方法与装置。
背景技术:
2.gnss-r(global navigation satellite system-reflectometry,全球卫星导航系统反射信号技术)能够同时接收多颗gnss卫星的信号,它是一种无源方式,优势为不借助于发射设备,可实现全球覆盖,且可用信号资源丰富。另外,gnss-r接收机的体积小、重量轻、功耗小、成本低、实时性强、不受天气等因素影响。gnss-r技术在海洋遥感、土壤遥感等探测领域具有非常重要的意义。
3.在利用gnss-r技术进行探测时,传统的接收机通过对反射信号的跟踪,输出i、q两路信号并计算相位,并以此作为初始相位进行后续信号的处理及数据反演。但存在频谱泄露的问题,导致在分析处理时初始相位的精确度较低,致使后续的反演结果精确度较低。
技术实现要素:
4.本发明的目的是提供一种精密获取gnss反射信号初相的方法与装置,可提高gnss反射信号初相的精度。
5.为实现上述目的,本发明提供了如下方案:
6.一种精密获取gnss反射信号初相的方法,包括:
7.通过全球导航卫星系统实时对导航卫星的直射信号进行跟踪捕获,并获取经反射面反射的导航卫星的反射信号;
8.根据所述反射信号、所述直射信号及本地多路复制信号,对所述反射信号进行二维相关值计算,确定不同时延不同多普勒频移下的复数相关值;所述本地多路复制信号为在本地产生的反射信号副本;
9.根据不同时延不同多普勒频移下的复数相关值,确定所述反射信号的iq序列;
10.根据所述iq序列,确定所述反射信号的初始相位序列;
11.采用全相位校正方法对所述初始相位序列进行校正,得到所述反射信号的初相位。
12.可选地,所述通过全球导航卫星系统实时对导航卫星的直射信号进行跟踪捕获,并获取经反射面反射的导航卫星的反射信号,具体包括:
13.通过右旋天线对导航卫星的直射信号进行跟踪捕获;
14.通过左旋天线接收经反射面反射的导航卫星的反射信号。
15.可选地,所述根据所述反射信号、所述直射信号及本地多路复制信号,对所述反射信号进行二维相关值计算,确定不同时延不同多普勒频移下的复数相关值,具体包括:
16.根据所述直射信号,确定导航卫星的伪随机码、直射信号延迟及多普勒频移;
17.基于所述直射信号延迟及所述多普勒频移,产生本地伪随机码序列及本地载波序
列;所述本地伪随机码序列为具有不同码延迟的伪随机码;所述本地载波序列为具有不同多普勒频移的载波序列;
18.基于所述本地伪随机码序列、所述本地载波序列及本地多路复制信号,对所述反射信号进行二维相关值计算,得到不同时延不同多普勒频移下的复数相关值。
19.可选地,所述根据所述iq序列,确定所述反射信号的初始相位序列,具体包括:
20.对所述iq序列进行反正切运算,得到所述反射信号的初始相位序列。
21.可选地,所述采用全相位校正方法对所述初始相位序列进行校正,得到所述反射信号的初相位,具体包括:
22.根据预设采样点数量,对所述初始相位序列进行截取,得到采样点序列;
23.根据所述预设采样点数量,构建初始汉宁窗;所述初始汉宁窗的大小为所述预设采样点数量;
24.将所述初始汉宁窗与自身卷积,并归一化处理,得到归一化汉宁窗;
25.将所述归一化汉宁窗与所述采样点序列相乘,得到加窗后的序列;
26.对加窗后的序列进行移位累加,得到累加序列;
27.对所述累加序列进行快速傅里叶变换,得到所述反射信号的初相位。
28.可选地,所述精密获取gnss反射信号初相的方法还包括:
29.对所述直射信号进行解算,得到伪距及导航电文,以对接收机进行定位。
30.为实现上述目的,本发明还提供了如下方案:
31.一种精密获取gnss反射信号初相的装置,包括:
32.信号接收模块,用于通过全球导航卫星系统实时对导航卫星的直射信号进行跟踪捕获,并获取经反射面反射的导航卫星的反射信号;
33.相关运算模块,与所述信号接收模块连接,用于根据所述反射信号、所述直射信号及本地多路复制信号,对所述反射信号进行二维相关值计算,确定不同时延不同多普勒频移下的复数相关值;所述本地多路复制信号为在本地产生的反射信号副本;
34.iq序列确定模块,与所述相关运算模块连接,用于根据不同时延不同多普勒频移下的复数相关值,确定所述反射信号的iq序列;
35.初始相位确定模块,与所述iq序列确定模块连接,用于根据所述iq序列,确定所述反射信号的初始相位序列;
36.校正模块,与所述初始相位确定模块连接,用于采用全相位校正方法对所述初始相位序列进行校正,得到所述反射信号的初相位。
37.可选地,所述信号接收模块包括:
38.右旋天线,用于对导航卫星的直射信号进行跟踪捕获;
39.左旋天线,用于收经反射面反射的导航卫星的反射信号。
40.根据本发明提供的具体实施例,本发明公开了以下技术效果:通过实时对导航卫星的直射信号进行跟踪捕获,并获取经反射面反射的导航卫星的反射信号,根据反射信号、直射信号及本地多路复制信号对反射信号进行二维相关值计算,确定不同时延不同多普勒频移下的复数相关值,再根据不同时延不同多普勒频移下的复数相关值,确定反射信号的iq序列,根据iq序列确定反射信号的初始相位序列,最后采用全相位校正方法对初始相位序列进行校正,得到反射信号的初相位。利用全球共享的gnss作为信号源,降低了初相位获
取的复杂度,并从信号处理的角度改善了数据质量,提高了初相位的精度,进而提高了后续根据初相位进行数据反演的精度。
附图说明
41.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
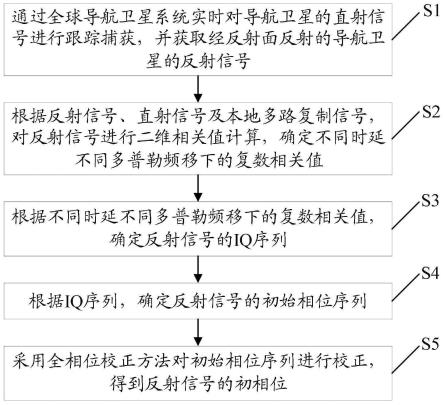
42.图1为本发明精密获取gnss反射信号初相的方法流程图;
43.图2为相位更新的流程图;
44.图3为对反射信号进行二维相关运算的示意图;
45.图4为对初始相位序列进行校正的流程图;
46.图5为本发明精密获取gnss反射信号初相的装置的模块示意图。
47.符号说明:
48.信号接收模块-1,相关运算模块-2,iq序列确定模块-3,初始相位确定模块-4,校正模块-5。
具体实施方式
49.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
50.本发明的目的是提供一种精密获取gnss反射信号初相的方法与装置,利用全球共享的gnss作为信号源,降低了初相位获取的复杂度,并从信号处理的角度改善数据质量,提高初相位的精度,进而提高后续根据初相位进行数据反演的精度。
51.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
52.实施例一
53.如图1所示,本实施例提供的精密获取gnss反射信号初相的方法包括:
54.s1:通过全球导航卫星系统实时对导航卫星的直射信号进行跟踪捕获,并获取经反射面反射的导航卫星的反射信号。
55.具体地,通过右旋天线对导航卫星的直射信号进行跟踪捕获。通过左旋天线接收经反射面反射的导航卫星的反射信号。
56.s2:根据所述反射信号、所述直射信号及本地多路复制信号,对所述反射信号进行二维相关值计算,确定不同时延不同多普勒频移下的复数相关值。所述本地多路复制信号为在本地产生的反射信号副本。
57.具体地,本发明涉及实现北斗/gps(global positioning system,全球定位系统)直射信号的捕获、跟踪及定位,同时将反射信号与本地多路复制信号进行相关运算得到不同时延下的复数相关值,并行处理北斗和gps双系统卫星直、反信号。
58.s3:根据不同时延不同多普勒频移下的复数相关值,确定所述反射信号的iq序列。
59.在本实施例中,不同时延不同多普勒频移下的复数相关值是反射信号本身的一种复数表达形式。i和q分别为反射信号的同向分量和正交分量。根据不同时延不同多普勒频移下的复数相关值,即可生成i、q两路正交的本地载波以及伪随机码,分别用于中频信号的解调、解扩。
60.s4:根据所述iq序列,确定所述反射信号的初始相位序列。具体地,对所述iq序列进行反正切运算,得到所述反射信号的初始相位序列。
61.s5:采用全相位校正方法对所述初始相位序列进行校正,得到所述反射信号的初相位。如图2所示为相位更新的流程图,图中δφ
correct
为校正的相位补偿量,即在初始相位序列上加一个校正值。
62.进一步地,步骤s2中,首先根据所述直射信号,确定导航卫星的伪随机码、直射信号延迟及多普勒频移。然后基于所述直射信号延迟及所述多普勒频移,产生本地伪随机码(c/a码)序列及本地载波序列。所述本地伪随机码序列为具有不同码延迟的伪随机码。所述本地载波序列为具有不同多普勒频移的载波序列。最后基于所述本地伪随机码序列、所述本地载波序列及本地多路复制信号,对所述反射信号进行二维相关值计算,得到不同时延不同多普勒频移下的复数相关值。如图3所示为对反射信号进行二维相关运算的示意图。图中,sr(n)为反射信号,为反射信号与本地c/a码相关计算后得到的原始信号序列,i
(1,1)
(n)为i分量,q
(1,1)
(n)为q分量,n-delay为延迟时间。图3中的最终目的是为了得到在不同多普勒、不同时延下的二维相关值,主体部分是由多“层”组成,每一“层”有自己的多普勒偏移;而在每一“层”里,又分为了不同的时间延迟。即图中每一“层”的被分为了多个不同延迟下的信号。
63.具体地,反射信号是由具有不同时间延迟和多普勒频移的分量共同组成的,其特性可以通过反射信号在不同码延迟和多普勒频移下的相关值来描述。在实际的反射信号接收和处理中,信号是以离散的形式给出的。基于此,以下公式为反射信号的时延-多普勒二维相关函数的离散形式:
[0064][0065]
其中,ddmk(
·
)是复数形式的关于时间延迟和多普勒频移的二维相关函数,ti是相干累加时间,fs是接收信号的采样频率,ts是接收信号的采样间隔,sr(nts)是反射信号的数字中频信号,c(
·
)是gps卫星的伪随机码,f
if
反射信号数字中频信号的中心频率值,τd是直射信号的时间延迟,τe是反射信号相对于直射信号的时间延迟,fd是直射信号的载波多普勒频率,fe是反射信号相对于直射信号的平均载波多普勒偏移,τ
n_delay
是相对于镜面反射点的时间延迟,f
n_doppler
相对于反射信号中心频率的多普勒频移值。
[0066]
在本地产生的不同时延、多普勒频移下的信号。即以上式信号模型为基础,改变τ
n_delay
与f
n_doppler
后得到的信号。由于信号本身是复数形式,故称为复数相关值数据。
[0067]
在直射信号实现捕获跟踪后,即可得到prn(spread spectrum code,扩频码)、直射信号延迟与多普勒频移。基于此,本地产生具有不同码延迟的c/a码序列(伪随机码)和具
有不同多普勒频移的载波序列。具体地,在固定的离散信号模型下,对多普勒和时延进行偏移,得到本地载波序列。每个卫星都有自己专属的伪随机码,成功捕获后即可获取捕获该卫星的prn,在本地存储有所有卫星的伪随机码表,通过查表即可获取该卫星的伪随机码序列。
[0068]
综上,反射信号的二维相关处理的过程为:
[0069]
(1)对于选定的某颗卫星,根据直射通道信息估算镜面反射点的码延迟和多普勒频移,并设置为参考零点。
[0070]
(2)根据信号采集任务要求,设定反射信号采集时延窗/多普勒窗范围及其间隔。
[0071]
(3)对反射信号进行相干累加和非相干累加,计算不同时延/多普勒频移下的相关值。
[0072]
进一步地,如图4所示,步骤s5具体包括:
[0073]
s51:根据预设采样点数量n,对所述初始相位序列φ进行截取,得到采样点序列。在本实施例中,截取初始相位序列的-n到n采样点,共2n+1个采样点,得到采样点序列。
[0074]
作为一种具体的实施方式,初始相位是第0个,n=3,则采样点序列中的采样点为(-3,-2,-1,0,1,2,3)。
[0075]
s52:根据所述预设采样点数量n,构建初始汉宁窗。所述初始汉宁窗的大小为所述预设采样点数量n。
[0076]
s53:将所述初始汉宁窗与自身卷积,并归一化处理,得到归一化汉宁窗。
[0077]
s54:将所述归一化汉宁窗与所述采样点序列相乘,得到加窗后的序列。
[0078]
s55:对加窗后的序列进行移位累加,得到累加序列。具体地,将第1项和n+1项,第2项和第n+2项,...,第n-1项和第2n-1项相加,得到加窗后的序列。
[0079]
s56:对所述累加序列进行快速傅里叶变换,得到所述反射信号的初相位φ
ap
。
[0080]
此外,本发明精密获取gnss反射信号初相的方法还包括:对所述直射信号进行解算,得到伪距及导航电文,以对接收机进行定位。
[0081]
具体地,对处于稳定跟踪状态的卫星信号进一步解算,得到伪距及导航电文,参与接收机定位及反射通道的控制。
[0082]
进一步地,本发明精密获取gnss反射信号初相的方法还包括:将反射信号的初相位和定位结果输出给用户。
[0083]
本发明采用异源接收模式,利用全球共享的gnss作为信号源,降低了成本,节约了空间,降低了反射信号的初相位获取的复杂度。相比于传统探测装置,本发明从信号处理的角度改善了数据质量,提高了gnss反射信号初相的精度,从而提高了最终遥感结果的准确性。
[0084]
实施例二
[0085]
为了执行上述实施例一对应的方法,以实现相应的功能和技术效果,下面提供一种精密获取gnss反射信号初相的装置。
[0086]
如图5所示,本实施例提供的精密获取gnss反射信号初相的装置包括:信号接收模块1、相关运算模块2、iq序列确定模块3、初始相位确定模块4及校正模块5。
[0087]
其中,信号接收模块1用于通过全球导航卫星系统实时对导航卫星的直射信号进行跟踪捕获,并获取经反射面反射的导航卫星的反射信号。
[0088]
具体地,所述信号接收模块1包括右旋天线及左旋天线。右旋天线用于对导航卫星的直射信号进行跟踪捕获。左旋天线用于收经反射面反射的导航卫星的反射信号。
[0089]
相关运算模块2与所述信号接收模块1连接,相关运算模块2用于根据所述反射信号、所述直射信号及本地多路复制信号,对所述反射信号进行二维相关值计算,确定不同时延不同多普勒频移下的复数相关值;所述本地多路复制信号为在本地产生的反射信号副本。
[0090]
iq序列确定模块3与所述相关运算模块2连接,iq序列确定模块3用于根据不同时延不同多普勒频移下的复数相关值,确定所述反射信号的iq序列。
[0091]
初始相位确定模块4与所述iq序列确定模块3连接,初始相位确定模块4用于根据所述iq序列,确定所述反射信号的初始相位序列。
[0092]
校正模块5与所述初始相位确定模块4连接,校正模块5用于采用全相位校正方法对所述初始相位序列进行校正,得到所述反射信号的初相位。
[0093]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
[0094]
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1