吸注器的运输系统的制作方法
本公开大体涉及医疗器械,具体涉及一种吸注器的运输系统。
背景技术:
1、在临床医疗中,输液是临床常用的医疗方法,常需要采用输液作为治疗手段进行治疗,通过该医疗方法能够将药液、营养液等液体物质输注到患者体内,以帮助患者康复。当患者需要接受输液等时,经常需要根据病情对多种不同的输液药物进行混合,而通过吸注器对不同的输液药物进行吸取以及注射等操作,可以调配出具有更符合疗效的治疗药液。
2、目前,医护人员等通常使用人工操作的方式来调配对患者实施输液所需的治疗药液。例如,当在药瓶与输液袋之间进行移液时,使用人工操作的方式从储柜中取用需要的吸注器。
3、然而,由于现阶段医疗机构中的医护人员仍显匮乏,当面对较大量的输液需求时,人工操作的方式难以高效率地进行药液调配。因此,需要提供一种能够辅助医护人员进行配液的装置,特别是提供一种能够对吸注器进行自动化运输、去帽和吸注的吸注器的运输系统。
技术实现思路
1、本公开是有鉴于上述现有技术的状况而提出的,其目的在于提供一种能够对吸注器进行自动化运输、去帽和吸注,并且能够提高自动化吸注时的精度的吸注器的运输系统。
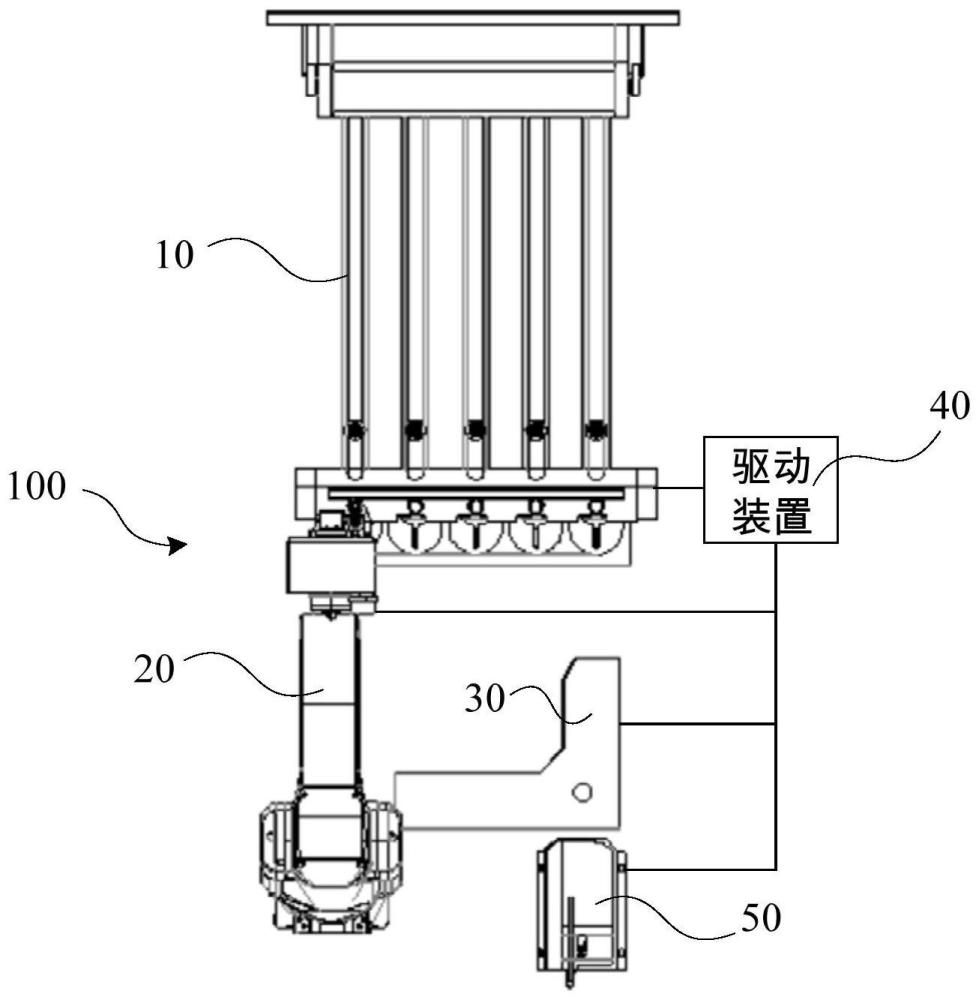
2、为此,本公开提供了一种吸注器的运输系统,所述吸注器包括具有容纳腔室的注射管、可移动地设置于所述注射管内腔的芯杆、与所述容纳腔室连通的针管、以及套设于所述针管的针帽,所述芯杆具有杆体、设置在所述杆体的一端且位于所述注射管内的活塞、以及位于所述杆体的另一端的把持部,所述运输系统包括用于载置所述吸注器的载置装置、将所述吸注器从所述载置装置拾取至目标位置的拾取装置、具有校准区域且用于对所述吸注器的位置进行校准的校准装置、以及驱动装置,所述载置装置包括具有供所述吸注器移动的入口及出口的料道、与所述出口相邻的送料机构、以及去帽机构,所述送料机构配置为可接收由所述出口送出的吸注器并将所述吸注器运送至送料位置,所述去帽机构与所述送料位置相邻,所述拾取装置包括可移动的承载机构、用于夹持所述吸注器的夹持机构、以及用于推送所述芯杆的推送机构,所述夹持机构和所述推送机构设置于所述承载机构,所述推送机构包括具有与所述把持部的外轮廓相匹配的第一凹槽的容纳部、以及设置在所述第一凹槽内的弹性部件,当所述把持部位于所述第一凹槽内时,所述弹性部件的下表面抵接于位于所述第一凹槽内的把持部的上表面,当所述运输系统对所述吸注器进行运输时,所述吸注器沿着所述料道由所述入口移动至所述出口,所述驱动装置驱动所述送料机构将所述吸注器运送至所述送料位置,并且所述驱动装置驱动所述拾取装置朝向所述送料位置移动至所述吸注器的把持部卡接于所述容纳部,然后驱动所述夹持机构对所述吸注器进行夹持,接着驱动所述拾取装置夹持所述吸注器移动至所述去帽机构以去除所述针帽,再驱动所述拾取装置夹持所述吸注器移动至所述校准区域,所述校准装置对所述吸注器的针尖位置进行校准得到所述针尖的校准坐标值,所述驱动装置基于所述校准坐标值规划移动路线以驱动所述拾取装置将所述吸注器移动至预定位置。
3、在本公开所涉及的吸注器的运输系统中,通过载置装置能够对吸注器进行载置,通过拾取装置能够对吸注器进行自动化运输和注液;通过载置装置的去帽机构和拾取装置配合能够对吸注器方便地进行自动化去帽;通过校准装置能够对针尖的位置进行校准,从而能够使吸注器精准地移动至预定位置与例如药瓶、输液袋等容器配合进行药物的吸注;另外,通过在拾取装置设置具有弹性部件的把持部且使弹性部件的下表面抵接于把持部的上表面,在推送机构在沿着芯杆的长度方向移动并与把持部配合而控制芯杆的移动进行注液时,特别是在使芯杆朝向靠近针管的方向移动的过程中,由于弹性部件抵接于把持部的上表面,能够有利于提高自动化注液时的注射精度。由此,能够得到一种能够对吸注器进行自动化运输、去帽和吸注,并且能够提高自动化吸注时的注射精度的吸注器的运输系统。
4、另外,在本公开所涉及的运输系统中,可选地,所述送料机构包括可转动的转盘、以及导引部,所述转盘包括呈圆盘状的主体部、以及形成在所述主体部的外周的用于搭载所述吸注器的运料缺口,以所述运料缺口面向所述出口的位置为初始位置,所述驱动装置驱动所述转盘进行转动以使搭载在所述运料缺口上的吸注器由所述初始位置沿着预定移动路径移动至所述送料位置,所述导引部配置为可使搭载在所述运料缺口上的吸注器随着所述转盘转动而沿着所述预定移动路径移动。在这种情况下,能够通过送料机构将吸注器移动至送料位置,从而方便地与拾取装置配合以对吸注器进行拾取。
5、另外,在本公开所涉及的运输系统中,可选地,所述导引部位于所述初始位置和所述预定位置之间且沿着所述吸注器的转动轨迹布置,当所述运料缺口容纳有所述吸注器并且转动至所述初始位置和所述送料位置之间时,沿着正交于所述转盘的上表面的方向进行投影,所述导引部的内壁位于所述吸注器的注射管的外侧且位于所述转盘的外周缘的内侧。在这种情况下,通过导引部能够抑制吸注器从运料缺口上不期望地滑出,使吸注器随着转盘转动而沿着预定移动路径移动至送料位置。
6、另外,在本公开所涉及的运输系统中,可选地,所述去帽机构具有与所述送料位置的区域连通的第二凹槽,所述第二凹槽的宽度大于所述针管的外径且小于所述针帽的外径,并且所述第二凹槽的高度不大于所述针帽与所述注射管的间距,所述拾取装置夹持所述吸注器从所述送料位置移动至所述针管位于所述第二凹槽内且所述针帽与所述注射管分别位于所述去帽机构的两侧,然后使所述吸注器朝向远离所述针帽的一侧移动以去除所述针帽。在这种情况下,通过设置于送料位置的区域连通的去帽机构,能够减少在通过拾取装置对吸注器进行拾取后移动至去帽机构的路程,拾取装置拾取吸注器后将其向外移动至第二凹槽内,再向远离去帽机构的方向移动即可去除针帽,由此,能够方便地对吸注器进行去帽,简化去帽流程,进而提高运输系统整体的运输效率。
7、另外,在本公开所涉及的运输系统中,可选地,所述夹持机构包括第一夹持部、可与所述第一夹持部相向或相背移动的第二夹持部,所述第一夹持部与所述第二夹持部配合形成与所述注射管相匹配的夹持空间,当对所述吸注器进行拾取时,所述驱动装置驱动所述承载机构朝向所述吸注器移动以使所述吸注器进入所述夹持空间且使所述把持部卡合于所述推送机构的第一凹槽,并且所述第一夹持部和所述第二夹持部相向移动并以所述第一夹持部和所述第二夹持部分别从两个方向抵接所述注射管的方式夹持所述注射管。由此,能够有利于提高拾取装置拾取吸注器的稳定性。
8、另外,在本公开所涉及的运输系统中,可选地,所述吸注器的注射管与所述针管相对的一端具有凸缘,所述拾取装置还包括设置于所述承载机构的卡持部,所述卡持部具有与所述凸缘的外轮廓相匹配的第三凹槽,并且当所述吸注器夹持于所述夹持机构时,所述凸缘至少部分位于所述第三凹槽内。由此,能够有利于提高拾取装置拾取吸注器的稳定性。
9、另外,在本公开所涉及的运输系统中,可选地,所述拾取装置还包括设置于所述承载机构上且位于所述夹持机构的下方的限位部,所述限位部具有相对靠近所述吸注器的限位面,所述限位面至少不位于所述夹持空间内,沿着垂直于所述限位部上表面的方向进行投影,所述限位面凹向相对远离所述夹持空间的方向且呈v字状。在这种情况下,在把持部卡合于推送机构的过程中,通过限位面抵接于注射管的下部,能够抑制吸注器发生不期望的倾斜,尽可能地使吸注器处于垂直的姿态,从而便于后续夹持机构对吸注器进行夹持;而且将限位面配置为呈v字状,除了从前后方向上对注射管的姿态进行限制,还能够从v字面的两个方向抵接于注射管的下部,抑制注射管在左右方向上的倾斜,从而进一步提高注射管与限位部在抵接时的稳定性。
10、另外,在本公开所涉及的运输系统中,可选地,还包括回收装置,所述回收装置包括拦杆、以及具有剪切区域的剪切机构,当需要将所述吸注器从所述拾取装置上取下时,所述驱动装置驱动所述承载机构移动至所述拦杆位于所述注射管与所述承载机构之间,并且使所述针管与所述注射管的连接处处于所述剪切区域内,然后通过所述剪切机构对所述连接处进行剪切以将所述针管与所述注射管分离,接着再驱动所述承载机构朝向远离所述拦杆的方向移动以将所述吸注器从所述拾取装置取下。由于吸注器的注射管和针管通常由不同的材料构成(例如注射管通常为塑料制品、针管为金属制品),在这种情况下,通过设置具有剪切机构的回收装置将针管与注射管分离,能够分别对针管与注射管进行分类回收,从而提升运输系统的环保性。
11、另外,在本公开所涉及的运输系统中,可选地,所述校准装置包括出光轴相互垂直的第一相机和第二相机,所述第一相机与所述第二相机配合形成所述校准区域。在这种情况下,通过第一相机和第二相机能够获取针尖的图像位置信息,从而转化成校准坐标值。
12、另外,在本公开所涉及的运输系统中,可选地,所述弹性部件为弹性垫片,并且当所述把持部位于所述第一凹槽内时,所述弹性垫片抵接于所述把持部时的弹力方向与所述芯杆的长度方向一致。在这种情况下,通过弹性垫片对把持部产生沿着芯杆的长度朝向针管延伸方向上的弹力,可以减小把持部与推送机构的间隙,由此能够进一步提高自动化注液时的注射精度。
13、根据本公开的吸注器的运输系统,能够对吸注器进行自动化运输、去帽和吸注,并且能够提高自动化吸注时的精度。
- 还没有人留言评论。精彩留言会获得点赞!