基于BP神经网络的地磁矢量测量系统的干扰磁场补偿方法
本发明涉及地磁矢量测量,尤其涉及一种基于bp神经网络的地磁矢量测量系统的干扰磁场补偿方法。
背景技术:
1、地磁矢量(北分量、东分量和垂直分量)测量广泛应用于勘测和搜索救援、矿产勘探、车辆检测、无人设备定位和地磁导航等领域。将三轴磁传感器与惯导系统(ins)相结合可以测量地磁场矢量场,惯导系统用于为三轴磁传感器提供姿态信息,利用姿态信息将该矢量转换为地理坐标系,该装置即为地磁场矢量测量系统。然而,由于铁磁性部件本身以及惯性元件、功率电路模块等其他电气设备产生的磁干扰,导致测量值与实际值之间存在较大误差,成为影响地磁场矢量测量精度的主要因素。因此,磁场干扰场补偿技术是提高测量精度的关键。
2、影响地磁矢量测量系统磁干扰补偿性能的主要因素有三个:(i)磁干扰补偿模型,即使用数学公式表征磁干扰源;(ii)补偿策略,即如何建立误差模型方程;(iii)补偿参数估计算法,即如何准确估计误差参数。针对地磁矢量测量系统的校正补偿问题,现有技术中通常采用以下几种校正补偿方式:
3、(1)基于矢量补偿模型并考虑涡流场以实现校正补偿,然而磁干扰非常复杂,一些其他类型的磁干扰,如电力设备和电流磁场则无法完全无法表征。
4、(2)基于旋转平台的补偿策略,包括使用三种不同的姿态旋转策略(对称旋转、正交旋转和随机旋转)构造方程,其中由于选择的测量位置具有代表性,并且覆盖了整个姿态空间,因而对称旋转策略的补偿效果最佳。但是该类方式需要旋转地磁矢量测量系统,会存在对地磁场梯度、环境地磁干扰敏感问题。
5、(3)采用拉格朗日乘数法估计地磁场矢量测量分量补偿模型中的误差参数以实现补偿,但是在分量补偿模型中未考虑涡流场。
6、现有技术中上述针对地磁矢量测量系统的校正补偿,补偿模型通常不完整,会存在以下问题:
7、1、未考虑涡流场或其他干扰源等,而在移动地磁矢量测量中,涡流场不容忽视。
8、2、仅考虑线性误差而未考虑非线性误差,例如,假设软磁干扰与外部地磁场线性相关,软磁干扰系数是3x3的矩阵,但是由于软磁材料特性的复杂性,用线性模型对其进行表征存在一定误差,这也对测量精度有很大影响,并且不能用线性误差模型完全表征,其中交叉场效应和磁滞即是导致非线性的两个重要因素。传统补偿模型通常是将误差参数视为常数参数,而事实上由于交叉场和磁滞效应等原因,一些磁干扰源是非线性的。
9、综上,现有技术中针对地磁矢量测量系统的校正补偿方案中,补偿模型通常不完整,未考虑涡流场或其他干扰源等,且未考虑非线性误差,致使无法精准描述测量值(待补偿)与真实值之间的非线性网络映射关系,导致补偿精度不高,且补偿过程复杂,在实际当中可操作性不强。
技术实现思路
1、本发明要解决的技术问题就在于:针对现有技术存在的技术问题,本发明提供一种实现方法简单、可操作性强、成本低、补偿模型完整且补偿精度高的基于bp神经网络的地磁矢量测量系统干扰磁场补偿方法。
2、为解决上述技术问题,本发明提出的技术方案为:
3、一种基于bp神经网络的地磁矢量测量系统的干扰磁场补偿方法,步骤包括:
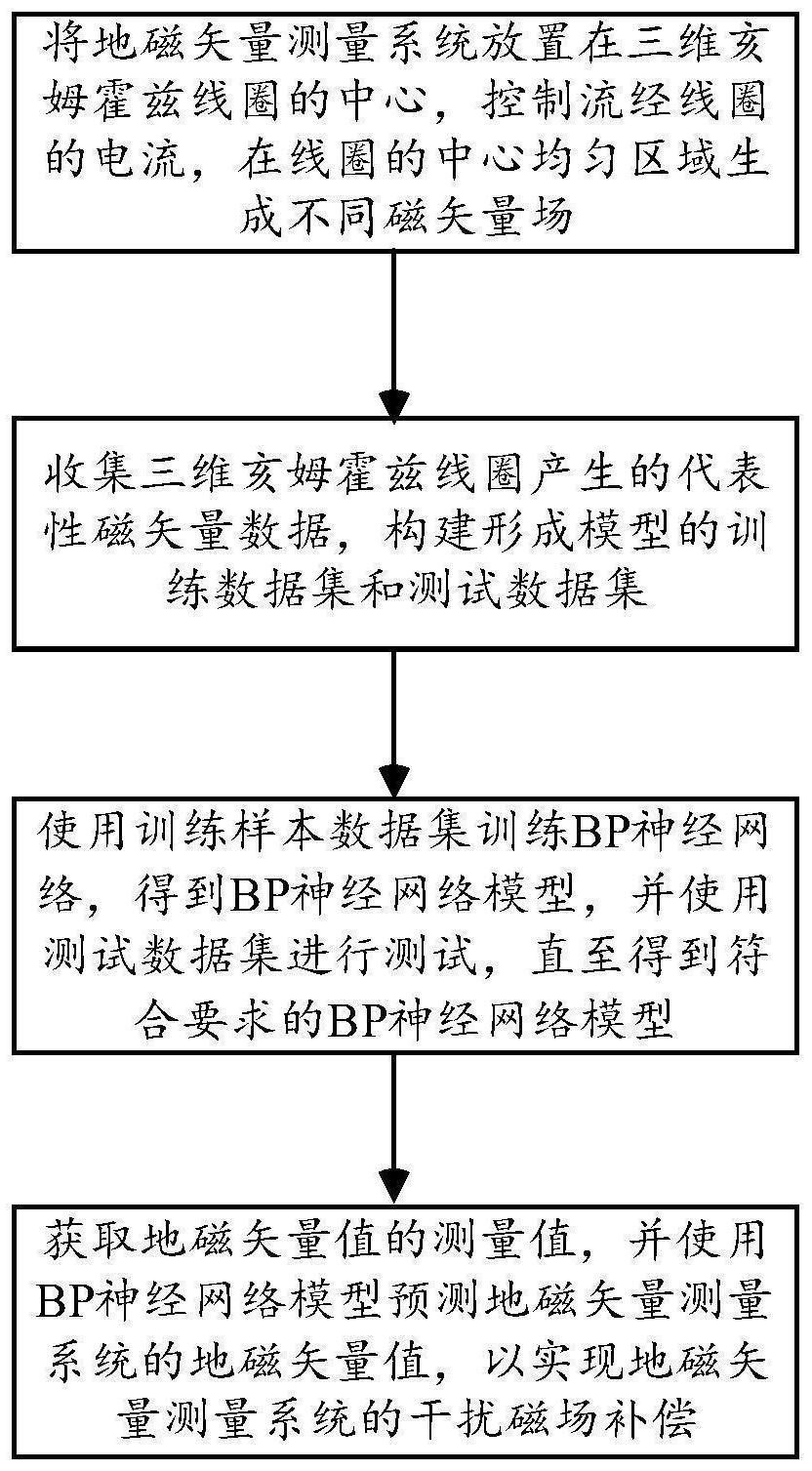
4、s01.将地磁矢量测量系统放置在三维亥姆霍兹线圈的中心,通过控制流经线圈的电流,在三维亥姆霍兹线圈的中心均匀区域生成不同振幅、不同方向以及不同变化率的磁矢量场;
5、s02.收集三维亥姆霍兹线圈产生的代表性磁矢量数据,构建形成模型的训练数据集和测试数据集;
6、s03.使用所述训练样本数据集训练bp神经网络,训练得到bp神经网络模型,并使用所述测试数据集对训练得到的bp神经网络模型进行测试,直至得到符合要求的bp神经网络模型;
7、s04.获取地磁矢量值的测量值,并使用步骤s03得到的所述bp神经网络模型预测地磁矢量测量系统的地磁矢量值,以实现地磁矢量测量系统的干扰磁场补偿。
8、进一步的,所述步骤s03中采用基因遗传算法(genetic algorithm,ga)优化bp神经网络。
9、进一步的,所述bp神经网络的输入层包括3个神经元以用于输入地磁矢量测量系统输出值hm=[hmx,hmy,hmz]t,hmx,hmy,hmz分别为地磁矢量测量系统输出值hm的三个分量,输出层包括3个神经元,以用于输出三维亥姆霍兹线圈产生的真实地磁矢量值h=[hx,hy,hz]t,hx,hy,hz分别为h的三个分量。
10、进一步的,所述bp神经网络的隐含层设置为2层或3层,隐含层中的神经元数量按照下式计算得到:
11、
12、其中,m和n分别表示bp神经网络中输入层和输出层中的神经元数量,β为1~10之间的常数。
13、进一步的,所述步骤s03中还包括模型评估和优化步骤,当模型训练过程结束时,评估训练得到的所述bp神经网络模型是否满足预设要求,如果是则得到最终的bp神经网络模型,否则调整所述bp神经网络模型的结构和参数,直至所述bp神经网络模型满足预设要求。
14、进一步的,所述模型评估和优化步骤中使用地磁矢量真值与bp神经网络模型预测的地磁矢量值之间的均方根误差rmse作为性能指标,以评估所述bp神经网络模型的补偿和泛化性能,所述均方根误差rmse的计算表达式为:
15、
16、其中,hactual为地磁矢量真值,hpredicted为bp神经网络模型预测的地磁矢量值,n为采样个数。
17、进一步的,所述训练样本集包括不同的hm和h随时间的变化的磁矢量场,hm为地磁矢量测量系统输出值,h为三维亥姆霍兹线圈产生的真实地磁矢量值,hm随时间的变化根据三轴磁力仪的测量数据得到,h随时间的变化根据三维亥姆赫兹线圈及电流得到,其中hm随时间的变化和h随时间的变化分别为:
18、
19、其中,hmx,hmy,hmz分别为地磁矢量测量系统输出值hm的三个分量,hx,hy,hz分别为三维亥姆霍兹线圈产生的真实地磁矢量值h的三个分量,δ表示变化量。
20、进一步的,所述步骤s02中,收集由三维亥姆霍兹线圈产生的代表性磁矢量数据时,通过控制三个正交线圈的电流序列,以在三维球面渐开线中生成不同的方向和幅值。
21、进一步的,三个正交线圈电流序列具体根据以下球面渐开线方程获得:
22、
23、其中,r表示渐开线径向,θ表示渐开线展开角,α表示渐开线压力角。
24、一种基于bp神经网络的地磁矢量测量系统的干扰磁场补偿系统,包括:
25、测试控制系统,用于将地磁矢量测量系统放置在三维亥姆霍兹线圈的中心,通过控制流经线圈的电流,在三维亥姆霍兹线圈的中心均匀区域生成不同振幅、不同方向以及不同变化率的磁矢量场;
26、数据收集模块,用于收集三维亥姆霍兹线圈产生的代表性磁矢量数据,构建形成模型的训练数据集和测试数据集;
27、模型训练模块,用于使用所述训练样本数据集训练bp神经网络,训练得到bp神经网络模型,并使用所述测试数据集对训练得到的bp神经网络模型进行测试,直至得到符合要求的bp神经网络模型;
28、磁场补偿模块,用于获取地磁矢量值的测量值,并使用得到的所述bp神经网络模型预测地磁矢量测量系统的地磁矢量值,以实现地磁矢量测量系统的干扰磁场补偿。
29、与现有技术相比,本发明的优点在于:
30、1、本发明利用bp神经网络的上述特性,采用bp神经网络作为补偿模型建立待补偿值与真实值之间的非线性网络映射关系,实现干扰磁场补偿,可以将尽可能多的干扰源考虑到补偿模型当中,构建形成具有完整性的补偿模型,解决传统补偿模型不完整的问题,提高干扰磁场补偿的精度,且补偿过程简单、效率高。
31、2、本发明通过结合使用具有高精度电流源的三维亥姆霍兹线圈来生成任何方向和幅值的磁场,使得可以方便的获得足够的神经网络模型数据集进行模型训练,并且三维亥姆霍兹线圈生成的数据可以确保数据在三维空间中具有代表性,从而进一步确保模型精度,同时还可以实现个性化的灵活补偿,且无需依赖于靠旋转测量系统来建立误差模型的方程组,可以避免对地磁场梯度、环境地磁干扰敏感的问题。
32、3、本发明基于bp神经网络构成补偿模型,操作简单、成本低,可以在各类环境下实现地磁矢量测量系统的干扰磁场补偿校正。
- 还没有人留言评论。精彩留言会获得点赞!