一种船舶旋转机械轴心轨迹测试与状态评估方法及系统与流程
本发明涉及船舶设备故障诊断与测试,尤其涉及一种船舶旋转机械轴心轨迹测试与状态评估方法及系统。
背景技术:
1、船舶旋转机械作为传动系统中的关键部件,广泛应用于电机、发动机、轴承、齿轮箱等工业生产中。旋转机械关键部件在恶劣或复杂的工况下运行极易发生故障,直接影响机械性能,甚至严重影响生产安全。其中,通过轴心轨迹的变化来进行故障状态的判断,以液压装置改变轴系轴线运行状态来模拟轴系的偏心故障,具有良好的模拟效果。
2、旋转机械的旋转轴在运动时,考虑到轴承转子系统为一个柔性体力学模型,由于重力作用转轴在旋转时,转轴中心会偏离静止时的轴线位置,运行状态的转轴轴心相对静止下转轴中心的距离即是偏心距。通过对x和y方向的偏心距测量,再利用在轴上粘贴的小磁块及磁电变化传感器,经过专门设计的软件算法,合成得出旋转轴的实时轴心轨迹变化曲线。轴心轨迹的变化与转速、加载力、摩擦面磨损等密切相关,可以利用其结果对旋转机械轴进行偏向磨损、转子不对中、油膜异常等状态识别。现有轴心轨迹测量只能短期测量,没有在线实时测量与状态识别集成。
3、因此,本申请提出了一种船舶旋转机械轴心轨迹测试与状态评估方法及系统。
技术实现思路
1、本发明要解决的技术问题是:提供一种船舶旋转机械轴心轨迹测试与状态评估方法及系统,能够在线连续测量船舶旋转机械的轴心轨迹,并评估判断轴系状态,且测量数据准确性、可靠性高。
2、为解决上述技术问题,本发明采用的技术方案是:
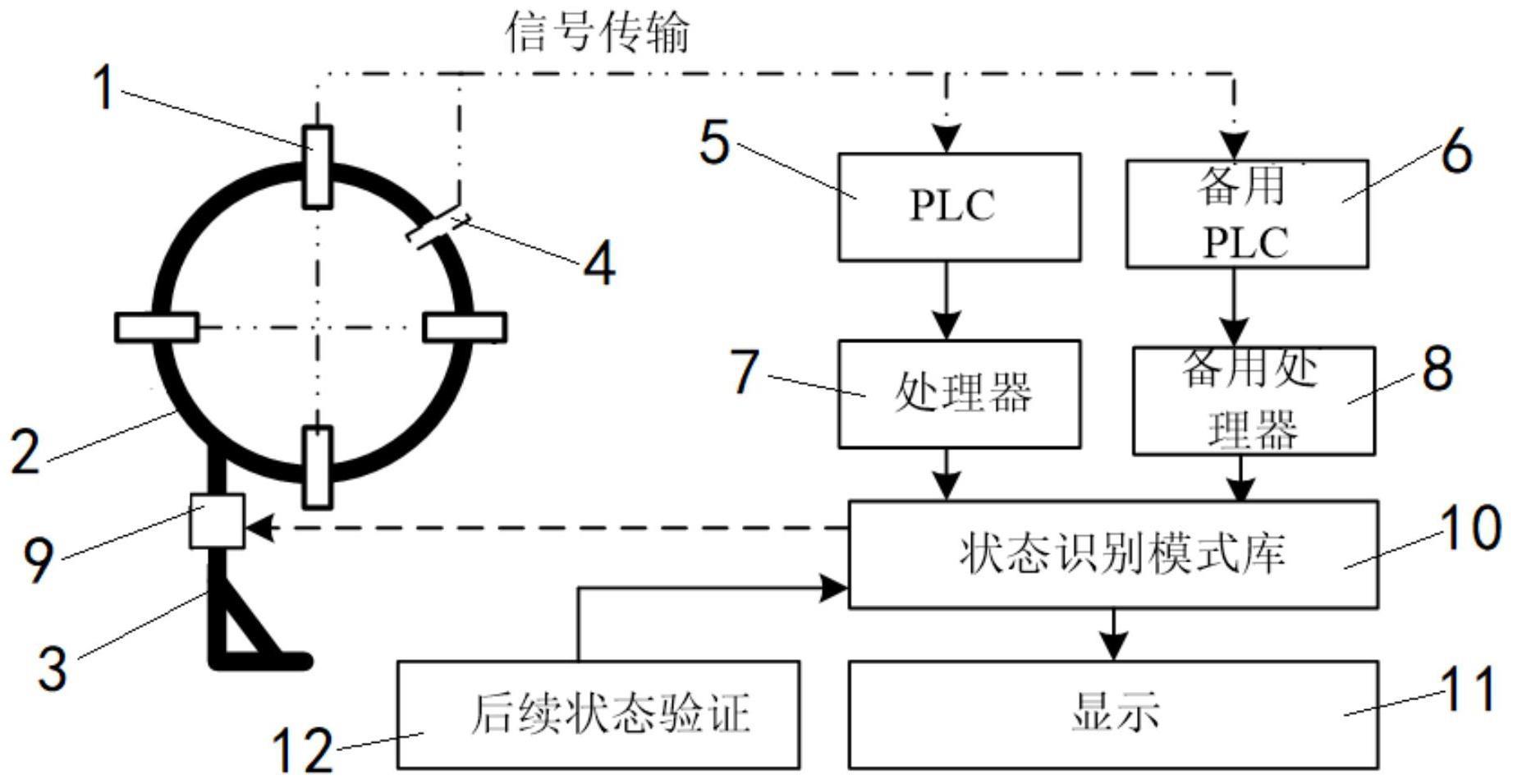
3、一种船舶旋转机械轴心轨迹测试与状态评估系统,包括激光位移传感器1、固定圆环2、支座3、磁电传感器4、plc控制器5、备用plc控制器6、处理器7、备用处理器8、现场显示器9、状态识别模块10、信息显示终端11、后续状态验证模块12;
4、其中,所述激光位移传感器1和磁电传感器4均安装于所述固定圆环2上,待测转轴13从所述固定圆环2中部穿过,且待测转轴13上贴有与所述磁电传感器4配套的铁磁块,所述固定圆环2固定于支座3上,所述支座3中部装有现场显示器9;
5、所述激光位移传感器1和磁电传感器4均与plc控制器5及备用plc控制器6电连接,所述plc控制器5和备用plc控制器6分别与处理器7和备用处理器8电连接,所述处理器7和备用处理器8均与状态识别模块10电连接,所述状态识别模块10与所述现场显示器9、信息显示终端11和后续状态验证模块12电连接。
6、进一步的,所述激光位移传感器1设有四个,四个激光位移传感器1沿圆周方向呈90度夹角均匀布置于所述固定圆环2上,且相对的两个激光位移传感器1互为备用。
7、进一步的,所述固定圆环2由上下两部分组成,固定圆环2的上下两部分通过螺纹连接固定为一体。
8、一种船舶旋转机械轴心轨迹测试与状态评估方法,基于如上所述的系统,具体包括如下步骤:
9、s1,通过激光位移传感器获得待测转轴在x和y方向的位移跳动信号;
10、s2,通过磁电传感器配合待测转轴上粘贴的小型铁磁块进行圆周方向定位;
11、s3,plc控制器采集激光位移传感器和磁电传感器的信号,并传输到处理器;
12、s4,通过阈值法对采集到的传感器数据进行清洗,得出传感器正常数据和传感器异常数据;
13、s5,通过基于区间估计理论的异常数据识别处理方法对所述传感器异常数据进行识别和报警;
14、s6,基于清洗后的所述传感器正常数据,通过阶次提取法对轴心轨迹进行提纯,得到提纯后的轴心轨迹图;
15、s7,根据现有的图像识别方法,将所述轴心轨迹图与状态识别模块中存储的典型轴心轨迹状态模式库进行匹配对比,输出待测转轴的运行状态判断结果;
16、s8,通过现场显示器和信息显示终端显示轴心轨迹测试与运行状态判断结果。
17、进一步的,在后续状态验证模块中,采用聚类和神经网络算法对所述运行状态判断结果进行自学习调整和强化。
18、进一步的,在步骤s4中,所述通过阈值法对采集到的传感器数据进行清洗,具体为:
19、通过读取传感器阈值设定表中的对应传感器的阈值下限和阈值上限,与采集到的传感器数据信息进行比较,判断是否为异常数据信息,每接收到一个数据就清洗一下该数据,直到采集任务完成才结束清洗任务。
20、进一步的,在步骤s5中,所述基于区间估计理论的异常数据识别处理方法,具体为:
21、遍历所有的异常数据的集合,计算其异常比例,若小于置信系数α,则用均值或中位数来取代异常数据;若大于置信系数α,则该通道发生了系统异常,应进行报警。
22、进一步的,在步骤s6中,所述通过阶次提取法对轴心轨迹进行提纯,具体为:
23、对测得的x和y方向的位移信号分别进行阶次分析,从阶次谱中选取感兴趣的特征阶次,对该阶次进行时域重构,合成由该阶次振动引起的分量轴心轨迹图;然后对感兴趣的主要振动阶次都进行时域重构,合成各阶分量轴心轨迹图;再将这些分量轨迹图进行叠加,最后得到提纯后的轴心轨迹图。
24、进一步的,所述plc控制器和处理器均采用双机热备。
25、本发明与现有技术相比具有以下主要的优点:
26、1、本申请包括四个激光位移传感器、固定圆环、支座、磁电传感器、plc及备用plc、处理器及备用处理器、现场显示器、状态识别模式库、信息显示终端、后续状态验证模块;具有旋转机械轴心轨迹的测量、数据清洗、数据分析处理、状态评估、状态后续验证自学习、数据显示与存储功能;
27、2、本申请采用四个激光位移传感器从2个相互垂直的方向上进行采集,并在同一方向上有2个传感器互为备用,提高数据采集的可靠性;在旋转轴上粘贴小型铁磁块并利用磁电传感器进行圆周方向定位,消除角位移产生的误差,提高了数据测量的准确性;
28、3、本申请在数据采集环节设计了阈值法和基于区间估计理论结合的方法识别异常数据,提高数据清洗的准确性;
29、4、本申请采用双机热备的采集设计方法,使用主机和备用机共同完成状态识别参数数据采集任务,在主机程序发生异常情况而无法继续进行数据处理任务时,备用机可立即接替主机继续执行数据处理任务,支持在线连续测量;
30、5、本申请集成了旋转机械典型轴心轨迹状态识别模式库,可以根据采集的数据绘制出轴心轨迹,并根据模式识别算法得出状态判断结论;
31、6、本申请具有后续状态验证确认后的自学习调整功能,能根据实测数据、对应的后验状态,通过聚类和神经网络算法对模式识别过程进行学习调整和强化;
32、7、本申请采用终端和现场两个显示器进行处理结果的显示,给现场使用人员提供了查看显示结果的便利性。
技术特征:
1.一种船舶旋转机械轴心轨迹测试与状态评估系统,其特征在于,包括激光位移传感器(1)、固定圆环(2)、支座(3)、磁电传感器(4)、plc控制器(5)、备用plc控制器(6)、处理器(7)、备用处理器(8)、现场显示器(9)、状态识别模块(10)、信息显示终端(11)、后续状态验证模块(12);
2.根据权利要求1所述的一种船舶旋转机械轴心轨迹测试与状态评估系统,其特征在于,所述激光位移传感器(1)设有四个,四个激光位移传感器(1)沿圆周方向呈90度夹角均匀布置于所述固定圆环(2)上,且相对的两个激光位移传感器(1)互为备用。
3.根据权利要求1所述的一种船舶旋转机械轴心轨迹测试与状态评估系统,其特征在于,所述固定圆环(2)由上下两部分组成,固定圆环(2)的上下两部分通过螺纹连接固定为一体。
4.一种船舶旋转机械轴心轨迹测试与状态评估方法,基于权利要求1~3任一项所述的系统,其特征在于,包括如下步骤:
5.根据权利要求4所述的一种船舶旋转机械轴心轨迹测试与状态评估方法,其特征在于,在后续状态验证模块中,采用聚类和神经网络算法对所述运行状态判断结果进行自学习调整和强化。
6.根据权利要求4所述的一种船舶旋转机械轴心轨迹测试与状态评估方法,其特征在于步骤s4中,所述通过阈值法对采集到的传感器数据进行清洗,具体为:
7.根据权利要求4所述的一种船舶旋转机械轴心轨迹测试与状态评估方法,其特征在于步骤s5中,所述基于区间估计理论的异常数据识别处理方法,具体为:
8.根据权利要求4所述的一种船舶旋转机械轴心轨迹测试与状态评估方法,其特征在于步骤s6中,所述通过阶次提取法对轴心轨迹进行提纯,具体为:
9.根据权利要求4所述的一种船舶旋转机械轴心轨迹测试与状态评估方法,其特征在于步骤s3中,所述plc控制器和处理器均采用双机热备。
技术总结
本发明涉及船舶设备故障诊断与测试技术领域,尤其涉及一种船舶旋转机械轴心轨迹测试与状态评估方法及系统。提出了一套旋转机械轴心轨迹测试与状态评估系统,通过采用四个激光位移传感器从2个相互垂直的方向上进行轴线变动位移的采集,并在同一方向上设计2个传感器互为备用,提高数据采集的可靠性;在旋转轴上粘贴小型铁磁块并利用磁电传感器进行圆周方向定位,消除角位移产生的误差,提高了数据测量的准确性;提出了阈值法和基于区间估计理论结合的异常数据识别处理方法;提出了双机热备的采集设计方法,支持在线连续测量;集成了旋转机械典型轴心轨迹状态识别模式库,提出了根据模式识别算法得出状态判断结论的处理方法。
技术研发人员:周涛涛,陈志敏,余业成,邹大程
受保护的技术使用者:中国舰船研究设计中心
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!