燃料电池车辆的续航里程估算方法、装置、设备及介质
1.本技术涉及工业大数据挖掘技术领域,特别涉及一种燃料电池车辆的续航里程估算方法、装置、设备及介质。
背景技术:
2.传统车辆主要由煤炭和石油等化石能源提供动力,大量的化石能源在使用过程中会产生大量污染物和温室气体,从而加剧世界环境污染和全球变暖。同时,化石能源作为非可再生能源,经过多年的开采,余量有限,因此,需要发展其他能源为车辆提供动力。
3.燃料电池车辆是由动力电池充电和氢气与氧气的化学反应产生的电能共同驱动,氢气作为可再生能源,其能源效率高、污染小等特点皆贴合当下解决环境污染、碳排放高导致气候变暖、燃油能量枯竭等需求。目前,国内燃料电池车辆主要用于运输和公交行业,在现有的加氢站布局下,燃料电池车辆需要严谨规划行驶路线和能量使用,提醒驾驶员当前车辆的可续航里程,以便有计划的加氢。
4.相关技术中,大多根据当前氢气的消耗速率、利用率和剩余量再结合当前的车速计算出当前时刻的可续航里程,或者结合大量工况特征数据、燃料电池和氢气质量数据进行剩余行驶里程的回归计算。
5.然而,该估算方法也存在一些问题,例如没有使用实车数据进行预测与验证、没有考虑简单的估算方法对车辆的运行模式、运行工况以及功率等变化的精准度、部分车辆行驶类型的数据样本缺少以及大量数据的深度学习模型带来的对各车型泛化能力弱等问题的限制。
技术实现要素:
6.本技术提供一种燃料电池车辆的续航里程估算方法、装置、设备及介质,以解决相关技术中的估算方法会降低车辆的运行模式、运行工况以及功率等变化的精准度,缺乏部分车辆类型数据样本以及泛化能力弱等问题。
7.本技术第一方面实施例提供一种燃料电池车辆的续航里程估算方法,包括以下步骤:
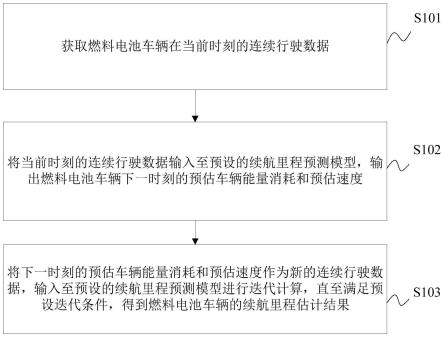
8.获取燃料电池车辆在当前时刻的连续行驶数据;
9.将所述当前时刻的连续行驶数据输入至预设的续航里程预测模型,输出所述燃料电池车辆下一时刻的预估车辆能量消耗和预估速度;
10.将所述下一时刻的预估车辆能量消耗和预估速度作为新的连续行驶数据,输入至所述预设的续航里程预测模型进行迭代计算,直至满足预设迭代条件,得到所述燃料电池车辆的续航里程估计结果。
11.根据本技术的一个实施例,在将所述当前时刻的连续行驶数据输入至所述预设的续航里程预测模型之前,还包括:
12.获取多个目标燃料电池车辆的历史连续行驶数据,其中,所述连续行驶数据包括
连续行驶时间、储氢罐温度、储氢罐压力、储氢罐容积、动力电池剩余容量、车辆行驶速度和电池包输出功率中的至少一种;
13.根据所述历史连续行驶数据生成训练样本,并利用所述训练样本训练续航里程基础模型,得到初始续航里程预测模型;
14.基于所述连续行驶数据微调训练所述初始续航里程预测模型,得到所述预设的续航里程预测模型。
15.根据本技术的一个实施例,所述根据所述历史连续行驶数据生成训练样本,包括:
16.基于预设的氢气质量计算公式,计算所述历史连续行驶数据中每个时刻的剩余氢气质量,得到第一行驶数据;
17.对所述第一行驶数据进行非线性拟合得到拟合曲线,并计算所述历史连续行驶数据中各数据对所述拟合曲线的方差,并基于所述方差清洗掉满足预设清洗条件的数据,得到第二行驶数据;
18.基于预设的数据样本格式,对所述第二行驶数据进行结构化处理,构建出数据量相同的不同工况的数据集,并通过预设的转换函数,对所述数据集进行数据归一化处理,得到所述训练样本。
19.根据本技术的一个实施例,所述续航里程基础模型为:
20.i
t
=σ(w
xi
x
t
+w
hiht-1
+w
cict-1
+bi);
21.f
t
=σ(w
xf
x
t
+w
hfht-1
+w
cfct-1
+bf);
22.c
t
=f
tct-1
+i
t
tanh(w
xc
x
t
+w
hcht-1
+bc);
23.o
t
=σ(w
xo
x
t
+w
hoht-1
+w
coct-1
+bo);
24.h
t
=o
t
tanh(c
t
);
25.其中,σ表示sigmoid函数,i
t
表示输入门,f
t
表示遗忘门,o
t
表示输出们,c
t
表示单元激活向量,h
t
为隐藏层单元,b分别为各项的偏差值,t为车辆运行时刻,tanh为激活函数,x
t
为当前时刻的数据,h
t-1
为上一时刻的输出数据,w
xi
为输入门与输入特征向量的权重矩阵,w
hi
为输入门与隐藏层单元向量的权重矩阵,w
ci
为输入门与激活向量的权重矩阵,bi为输入门偏差值,w
xf
为遗忘门与输入特征向量的权重矩阵,w
hf
为遗忘门与隐藏层单元向量的权重矩阵,w
cf
为遗忘门与激活向量的权重矩阵,bf为遗忘门偏差值,w
xc
为单元激活向量与输入特征向量的权重矩阵,w
hc
为单元激活向量与隐藏层单元向量的权重矩阵,bc为单元激活向量偏差值,w
xo
为输出门与输入特征向量的权重矩阵,w
ho
为输出门与隐藏层单元向量的权重矩阵,w
co
为输出门与隐藏层单元向量的权重矩阵,bo为输出门偏差值。
26.根据本技术的一个实施例,所述预设迭代条件为:
[0027][0028][0029]
其中,m
t0
为当前时刻剩余氢气质量,soc
t0
为当前时刻动力电池剩余电量,δm为下一时刻的车辆能量消耗预估,δ
soc
为下一时刻的车辆速度预估,t0为当前时刻,n为迭代次数。
[0030]
根据本技术的一个实施例,所述得到所述燃料电池车辆的续航里程估计结果,包括:
[0031]
基于预设的续驶里程预估公式,得到所述燃料电池车辆的续航里程估计结果,其
中,所述预设的续驶里程预估公式为:
[0032][0033]
其中,v
t
为当前时刻车速,v
t+1
为下一时刻车速,δt为两个时刻的时间差。
[0034]
根据本技术实施例的燃料电池车辆的续航里程估算方法,通过获取燃料电池车辆当前时刻的连续行驶数据,输入至预设的续航里程预测模型,并输出燃料电池车辆下一时刻的预估车辆能量消耗和预估速度,将其作为新的连续行驶数据输入至预设的续航里程预测模型进行迭代计算,从而得到燃料电池车辆的续航里程估计结果。由此,解决了相关技术中的估算方法会降低车辆的运行模式、运行工况以及功率等变化的精准度,且缺乏部分车型的数据样本以及泛化能力弱等问题,通过基于lstm(long short-term memory,长短期记忆网络)和迁移学习的燃料电池车续航里程的估算方法,增强了预测模型的泛化能力,从而提高了实车数据预测的精准度。
[0035]
本技术第二方面实施例提供一种燃料电池车辆的续航里程估算装置,包括:
[0036]
获取模块,用于获取燃料电池车辆在当前时刻的连续行驶数据;
[0037]
输出模块,用于将所述当前时刻的连续行驶数据输入至预设的续航里程预测模型,输出所述燃料电池车辆下一时刻的预估车辆能量消耗和预估速度;
[0038]
计算模块,用于将所述下一时刻的预估车辆能量消耗和预估速度作为新的连续行驶数据,输入至所述预设的续航里程预测模型进行迭代计算,直至满足预设迭代条件,得到所述燃料电池车辆的续航里程估计结果。
[0039]
根据本技术的一个实施例,在将所述当前时刻的连续行驶数据输入至所述预设的续航里程预测模型之前,所述输出模块,还包括:
[0040]
获取单元,用于获取多个目标燃料电池车辆的历史连续行驶数据,其中,所述连续行驶数据包括连续行驶时间、储氢罐温度、储氢罐压力、储氢罐容积、动力电池剩余容量、车辆行驶速度和电池包输出功率中的至少一种;
[0041]
训练单元,用于根据所述历史连续行驶数据生成训练样本,并利用所述训练样本训练续航里程基础模型,得到初始续航里程预测模型;
[0042]
微调单元,用于基于所述连续行驶数据微调训练所述初始续航里程预测模型,得到所述预设的续航里程预测模型。
[0043]
根据本技术的一个实施例,所述训练单元,具体用于:
[0044]
基于预设的氢气质量计算公式,计算所述历史连续行驶数据中每个时刻的剩余氢气质量,得到第一行驶数据;
[0045]
对所述第一行驶数据进行非线性拟合得到拟合曲线,并计算所述历史连续行驶数据中各数据对所述拟合曲线的方差,并基于所述方差清洗掉满足预设清洗条件的数据,得到第二行驶数据;
[0046]
基于预设的数据样本格式,对所述第二行驶数据进行结构化处理,构建出数据量相同的不同工况的数据集,并通过预设的转换函数,对所述数据集进行数据归一化处理,得到所述训练样本。
[0047]
根据本技术的一个实施例,所述续航里程基础模型为:
[0048]it
=σ(w
xi
x
t
+w
hiht-1
+w
cict-1
+bi);
[0049]ft
=σ(w
xf
x
t
+w
hfht-1
+w
cfct-1
+bf);
[0050]ct
=f
tct-1
+i
t
tanh(w
xc
x
t
+w
hcht-1
+bc);
[0051]ot
=σ(w
xo
x
t
+w
hoht-1
+w
coct-1
+bo);
[0052]ht
=o
t
tanh(c
t
);
[0053]
其中,σ表示sigmoid函数,i
t
表示输入门,f
t
表示遗忘门,o
t
表示输出们,c
t
表示单元激活向量,h
t
为隐藏层单元,b分别为各项的偏差值,t为车辆运行时刻,tanh为激活函数,x
t
为当前时刻的数据,h
t-1
为上一时刻的输出数据,w
xi
为输入门与输入特征向量的权重矩阵,w
hi
为输入门与隐藏层单元向量的权重矩阵,w
ci
为输入门与激活向量的权重矩阵,bi为输入门偏差值,w
xf
为遗忘门与输入特征向量的权重矩阵,w
hf
为遗忘门与隐藏层单元向量的权重矩阵,w
cf
为遗忘门与激活向量的权重矩阵,bf为遗忘门偏差值,w
xc
为单元激活向量与输入特征向量的权重矩阵,w
hc
为单元激活向量与隐藏层单元向量的权重矩阵,bc为单元激活向量偏差值,w
xo
为输出门与输入特征向量的权重矩阵,w
ho
为输出门与隐藏层单元向量的权重矩阵,w
co
为输出门与隐藏层单元向量的权重矩阵,bo为输出门偏差值。
[0054]
根据本技术的一个实施例,所述预设迭代条件为:
[0055][0056][0057]
其中,m
t0
为当前时刻剩余氢气质量,soc
t0
为当前时刻动力电池剩余电量,δm为下一时刻的车辆能量消耗预估,δ
soc
为下一时刻的车辆速度预估,t0为当前时刻,n为迭代次数。
[0058]
根据本技术的一个实施例,所述计算模块,包括:
[0059]
计算单元,用于基于预设的续驶里程预估公式,得到所述燃料电池车辆的续航里程估计结果,其中,所述预设的续驶里程预估公式为:
[0060][0061]
其中,v
t
为当前时刻车速,v
t+1
为下一时刻车速,δt为两个时刻的时间差。
[0062]
根据本技术实施例的燃料电池车辆的续航里程估算装置,通过获取燃料电池车辆当前时刻的连续行驶数据,输入至预设的续航里程预测模型,并输出燃料电池车辆下一时刻的预估车辆能量消耗和预估速度,将其作为新的连续行驶数据输入至预设的续航里程预测模型进行迭代计算,从而得到燃料电池车辆的续航里程估计结果。由此,解决了相关技术中的估算方法会降低车辆的运行模式、运行工况以及功率等变化的精准度,且缺乏部分车型的数据样本以及泛化能力弱等问题,通过基于lstm和迁移学习的燃料电池车续航里程的估算方法,增强了预测模型的泛化能力,从而提高了实车数据预测的精准度。
[0063]
本技术第三方面实施例提供一种电子设备,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序,以实现如上述实施例所述的燃料电池车辆的续航里程估算方法。
[0064]
本技术第四方面实施例提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行,以用于实现如上述实施例所述的燃料电池车辆的续航里程估算方法。
[0065]
本发明附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变
得明显,或通过本发明的实践了解到。
附图说明
[0066]
本发明上述的和/或附加的方面和优点从下面结合附图对实施例的描述中将变得明显和容易理解,其中:
[0067]
图1为根据本技术实施例的燃料电池车辆的续航里程估算方法的流程图;
[0068]
图2为根据本技术一个实施例的整体框架流程图;
[0069]
图3为根据本技术一个实施例的lstm模型结构示意图;
[0070]
图4为根据本技术实施例的燃料电池车辆的续航里程估算装置的方框示意图;
[0071]
图5为根据本技术实施例的电子设备的结构示意图。
具体实施方式
[0072]
下面详细描述本发明的实施例,实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
[0073]
下面参照附图描述根据本发明实施例提出的料电池车辆的续航里程估算方法、装置、设备及介质。针对上述背景技术中提到的相关技术中的估算方法会降低车辆的运行模式、运行工况以及功率等变化的精准度,缺乏部分车辆类型数据样本以及泛化能力弱的问题,本技术提供了一种燃料电池车辆的续航里程估算方法,在该方法中,通过获取燃料电池车辆当前时刻的连续行驶数据,输入至预设的续航里程预测模型,并输出燃料电池车辆下一时刻的预估车辆能量消耗和预估速度,将其作为新的连续行驶数据输入至预设的续航里程预测模型进行迭代计算,从而得到燃料电池车辆的续航里程估计结果。由此,解决了相关技术中的估算方法会降低车辆的运行模式、运行工况以及功率等变化的精准度,且缺乏部分车型的数据样本以及泛化能力弱等问题,通过基于lstm和迁移学习的燃料电池车续航里程的估算方法,增强了预测模型的泛化能力,从而提高了实车数据预测的精准度。
[0074]
具体而言,图1是本技术实施例的燃料电池车辆的续航里程估算方法的流程图。
[0075]
如图1所示,该燃料电池车辆的续航里程估算方法包括以下步骤:
[0076]
在步骤s101中,获取燃料电池车辆在当前时刻的连续行驶数据。
[0077]
具体地,如图2所示,本技术实施例首先需要通过车载动力系统的实时装置对平台数据以及燃料电池车辆在当前时刻的连续行驶数据进行数据采集,并保存采集到的实时数据,然后通过车辆的32960等通讯协议类型上传至统一计算平台。
[0078]
其次,通过平台和车辆的通讯协议类型采集多辆燃料电池车辆的长期数据,作为基础模型的原始数据,并将每辆车近2天的实时数据保存在车辆的软件系统中,作为终端模型的原始数据上传至统一计算平台。
[0079]
在步骤s102中,将当前时刻的连续行驶数据输入至预设的续航里程预测模型,输出燃料电池车辆下一时刻的预估车辆能量消耗和预估速度。
[0080]
其中,预设的续航里程预测模型可以为本领域技术人员根据车辆续航里程估算方法的实际预测功能进行相应的设置,在此不做具体限定。
[0081]
具体地,本技术实施例在获取到燃料电池当前时刻的连续行驶数据后,将该数据
输入至预设的续航里程预测模型中,并输出燃料电池车辆下一时刻的预估车辆能量消耗和预估速度。
[0082]
进一步地,在一些实施例中,在将当前时刻的连续行驶数据输入至预设的续航里程预测模型之前,还包括:获取多个目标燃料电池车辆的历史连续行驶数据,其中,连续行驶数据包括连续行驶时间、储氢罐温度、储氢罐压力、储氢罐容积、动力电池剩余容量、车辆行驶速度和电池包输出功率中的至少一种;根据历史连续行驶数据生成训练样本,并利用训练样本训练续航里程基础模型,得到初始续航里程预测模型;基于连续行驶数据微调训练初始续航里程预测模型,得到预设的续航里程预测模型。
[0083]
具体地,本技术实施例在将当前时刻的连续行驶数据输入至预设的续航里程预测模型之前,还需要采集多个目标燃料电池车辆的历史连续行驶数据,主要包括连续行驶时间、储氢罐温度、储氢罐压力、储氢罐容积、动力电池剩余容量、车辆行驶速度和电池包输出功率中的至少一种。
[0084]
进一步地,本技术实施例在采集到多个目标燃料电池车辆的历史连续行驶数据后,还需要通过平台和车辆的通讯协议采集多辆燃料电池车辆的长期数据,作为续航里程基础模型的原始数据即训练样本,进而利用训练样本对续航里程基础模型进行训练,从而得到初始续航里程预测模型,然后将每辆车近2天的实时数据保存在车辆的软件系统中,作为终端模型的原始数据,即得到预设的续航里程预测模型。
[0085]
进一步地,在一些实施例中,根据历史连续行驶数据生成训练样本,包括:基于预设的氢气质量计算公式,计算历史连续行驶数据中每个时刻的剩余氢气质量,得到第一行驶数据;对第一行驶数据进行非线性拟合得到拟合曲线,并计算历史连续行驶数据中各数据对拟合曲线的方差,并基于方差清洗掉满足预设清洗条件的数据,得到第二行驶数据;基于预设的数据样本格式,对第二行驶数据进行结构化处理,构建出数据量相同的不同工况的数据集,并通过预设的转换函数,对数据集进行数据归一化处理,得到训练样本。
[0086]
具体地,如图2所示,本技术实施例在根据历史连续行驶数据生成训练样本的过程中,需要对上述采集到的数据进行数据预处理,首先,需要进行数据转化,即基于预设的氢气质量计算公式,计算历史连续行驶数据中每个时间节点的剩余氢气质量,从而得到第一行驶数据,具体表达式如下:
[0087][0088]
其中,m为氢气分子摩尔质量(g/mol),v为燃料电池车储氢罐总容积(l),r为公共气体常量((mpa*l)/(mol*k)),p为燃料电池车储氢罐压力(mpa),t为燃料电池车储氢罐内温度(k),z为当前压力、温度下的氢气压缩因子。
[0089]
其次,如图2所示,本技术实施例在进行数据转化后,需要对得到的第一行驶数据进行数据清洗,主要方法包括:首先去除数据的异常值,然后对燃料电池车辆的速度、累积里程数、氢气质量和动力电池电量的数据点进行非线性拟合得到拟合曲线方程,并计算历史连续行驶数据中各数据对拟合曲线的方差,基于方差清洗掉满足预设清洗条件的数据,即方差过大时,判定数据值异常,并将其去除,从而得到第二行驶数据。
[0090]
再次,如图2所示,本技术实施例需要基于预设的数据样本格式,对第二行驶数据进行结构化处理,从而构建出数据量相同的不同工况的数据集。
[0091]
具体而言,本技术实施例可以根据所有氢气瓶当前氢气质量之和与所有氢气瓶满容量时的氢气质量之和的比值将车辆划分为三个行驶状态:多氢行驶状态、低氢行驶状态和纯电行驶状态,然后,将每相邻30个时间单位的数据点构成一个数据样本,以此类推,从而构成时间始终连续的数据集;同时,改变起始点的数据构建新的30个时间单位的数据样本,以此类推,从而构成一组新的时间始终连续的新数据集,此时新数据集可以增加一倍的数据量,进而继续按照上述方法,直到构建出数据量相当的不同工况的数据集。其中,生成一组数据样本格式如下:
[0092][0093]yn
=[v
i+30 m
i+30 soc
i+30
]
[0094]
其中,i为时间(s),vi为i时刻的车辆当前速度(m/s),mi为i时刻的车辆当前氢气剩余量(kg),soci为i时刻的车辆当前动力电池电量(%),pi为i时刻的电池输出功率(w),需要说明的是,xn中每一行为车辆在某一时间点的数据,该行的上下两行与其保持连续。
[0095]
最后,如图2所示,在本技术实施例使用的数据中,因不同车型、车辆能源系统的性能衰退、驾驶人员、行驶路段等原因,不同车辆的数据分布均有所区别,因此,需要通过转换函数把所有相关参数分别进行归一化处理,从而得到训练样本。
[0096]
可选地,本技术实施例所采用的方法为使用线性归一化通过对原始数据进行线性变换,使其结果落到[0,1]区间,其中,转换函数可以表示为:
[0097][0098]
其中,b为原始数据,b
max
为数据的最大值,b
min
为数据的最小值。
[0099]
进一步地,如图2所示,本技术实施例在对数据进行数据预处理后,需要对续航里程基础模型进行训练,由于rnn(recurrent neural network,循环神经网络)与其他神经网络不同,是一种用于处理序列数据的神经网络,且基于递归运算逻辑,循环神经网络在某一时刻timestep=t的输出数据h
t
,基于当前时刻的数据x
t
和上一时刻的输出数据h
t-1
,当计算到最后一个时刻的输出h
t
时,网络包含了t0至t所有时刻的信息。因此,在燃料电池车辆的续驶里程应用上,当时间轴长期累积时,timestep就会很大,从而导致在h
t
至h0的反向传播过程中会产生梯度爆炸或梯度消失的问题。
[0100]
因此,如图3所示,所以为了解决这个问题,本技术实施例采用lstm循环神经网络,即在rnn单元中增加3个门控单元(gate),分别是输入门(input gate)、遗忘门(forget gate)和输出门(output gate),通过一个sigmoid神经层和一个逐点相乘的操作,门可以选择性地让信息通过。其中,lstm循环神经网络模型的具体公式如下:
[0101]it
=σ(w
xi
x
t
+w
hiht-1
+w
cict-1
+bi)
[0102]ft
=σ(w
xf
x
t
+w
hfht-1
+w
cfct-1
+bf)
[0103]ct
=f
tct-1
+i
t
tanh(w
xc
x
t
+w
hcht-1
+bc)
[0104]ot
=σ(w
xo
x
t
+w
hoht-1
+w
coct-1
+bo)
[0105]ht
=o
t
tanh(c
t
)
[0106]
其中,σ表示sigmoid函数,i
t
表示输入门,f
t
表示遗忘门,o
t
表示输出们,c
t
表示单元激活向量,h
t
为隐藏层单元,b分别为各项的偏差值,t为车辆运行时刻,tanh为激活函数,x
t
为当前时刻的数据,h
t-1
为上一时刻的输出数据,w
xi
为输入门与输入特征向量的权重矩阵,w
hi
为输入门与隐藏层单元向量的权重矩阵,w
ci
为输入门与激活向量的权重矩阵,bi为输入门偏差值,w
xf
为遗忘门与输入特征向量的权重矩阵,w
hf
为遗忘门与隐藏层单元向量的权重矩阵,w
cf
为遗忘门与激活向量的权重矩阵,bf为遗忘门偏差值,w
xc
为单元激活向量与输入特征向量的权重矩阵,w
hc
为单元激活向量与隐藏层单元向量的权重矩阵,bc为单元激活向量偏差值,w
xo
为输出门与输入特征向量的权重矩阵,w
ho
为输出门与隐藏层单元向量的权重矩阵,w
co
为输出门与隐藏层单元向量的权重矩阵,bo为输出门偏差值。
[0107]
进一步地,本技术实施例采用的lstm循环神经网络模型通过通讯网络传输下发至车辆终端系统,并进行终端微调训练数据准备。
[0108]
具体而言,本技术实施例基于续航里程基础模型的数据预处理方法对燃料电池车实时数据进行预处理,即数据转换、数据清洗、结构化处理和归一化处理后,由于在车辆终端进行结构化处理时不需要对数据集做基于数据比例的切分和重组,只需要对每个时间起点差δ
t0
和数据长度δ
t
进行平均切分,因此,本技术实施例需要对基础模型进行迁移学习,并在终端进行微调训练。需要说明的是,迁移模型只需达到贴合本车数据的目标,而不需要考虑模型对多车的泛化能力,则在归一化处理时采用本车的最大值b
max
、最小值b
min
等参数。
[0109]
进一步地,本技术实施例通过使用之前在大数据集上经过训练的预训练模型,在微调过程中保持模型原有的结构和初始权重不变,随后在新数据集的基础上重新训练,进而对本车数据进行微调。也就是说,本技术实施例将采集到的实时数据进行预处理,即转换、清洗、结构化处理和归一化处理,并将其输入微调模型,从而获得下一时刻的车辆能量消耗预估和速度预估,以达到更高的精准度。其中,下一时刻的车辆能量消耗预估和速度预估的表达式分别为:
[0110]
δm=m
t+1-m
t0
[0111]
δ
soc
=soc
t+1-soc
t0
[0112]vt+1
[0113]
其中,m
t+1
为下一时刻剩余氢气质量,soc
t+1
为下一时刻动力电池剩余电量,v
t+1
为下一时刻车速,m
t0
为当前时刻剩余氢气质量,soc
t0
为当前时刻动力电池剩余电量。
[0114]
在步骤s103中,将下一时刻的预估车辆能量消耗和预估速度作为新的连续行驶数据,输入至预设的续航里程预测模型进行迭代计算,直至满足预设迭代条件,得到燃料电池车辆的续航里程估计结果。
[0115]
具体地,本技术实施例将上述获得的下一时刻的预估车辆能量消耗和预估速度作为新的连续行驶数据,并输入至预设的续航里程预测模型进行迭代计算,其中,预设迭代条件为多次迭代下个时间节点的预测直至剩余能量清零,即满足表达式:
[0116][0117][0118]
其中,m
t0
为当前时刻剩余氢气质量,soc
t0
为当前时刻动力电池剩余电量,δm为下一
时刻的车辆能量消耗预估,δ
soc
为下一时刻的车辆速度预估,t0为当前时刻,n为迭代次数。
[0119]
进一步地,在一些实施例中,得到燃料电池车辆的续航里程估计结果,包括:基于预设的续驶里程预估公式,得到燃料电池车辆的续航里程估计结果。
[0120]
具体地,当本技术时实施例多次迭代下个时间节点的预测直至剩余能量清零时,并基于预设的续驶里程预估公式,得到燃料电池车辆的续航里程估计结果,其中,预设的续驶里程预估公式为:
[0121][0122]
其中,v
t
为当前时刻车速,v
t+1
为下一时刻车速,δt为两个时刻的时间差。
[0123]
综上,本技术实施例基于lstm和迁移学习的燃料电池车续航里程的估算方法,带来如下技术效果:
[0124]
(1)使用海量数据,提供基于实车数据的更精准预测。
[0125]
(2)采用循环神经网络,让模型训练不受数据部分类型数据的缺失影响。
[0126]
(3)基于海量数据的消耗逻辑训练,重点强化对当前车辆的数据学习,在有强大逻辑和记忆的模型下能高贴合当前车辆的行驶数据,以增强模型的泛化能力,达到在每辆车上更精准的预测。
[0127]
根据本技术实施例的燃料电池车辆的续航里程估算方法,通过获取燃料电池车辆当前时刻的连续行驶数据,输入至预设的续航里程预测模型,并输出燃料电池车辆下一时刻的预估车辆能量消耗和预估速度,将其作为新的连续行驶数据输入至预设的续航里程预测模型进行迭代计算,从而得到燃料电池车辆的续航里程估计结果。由此,解决了相关技术中的估算方法会降低车辆的运行模式、运行工况以及功率等变化的精准度,且缺乏部分车型的数据样本以及泛化能力弱等问题,通过基于lstm和迁移学习的燃料电池车续航里程的估算方法,增强了预测模型的泛化能力,从而提高了实车数据预测的精准度。
[0128]
其次参照附图描述根据本发明实施例提出的种燃料电池车辆的续航里程估算装置。
[0129]
图4是本技术实施例的种燃料电池车辆的续航里程估算装置的方框示意图。
[0130]
如图4所示,该燃料电池车辆的续航里程估算装置10包括:获取模块100、输出模块200和计算模块300。
[0131]
其中,获取模块100,用于获取燃料电池车辆在当前时刻的连续行驶数据;
[0132]
输出模块200,用于将当前时刻的连续行驶数据输入至预设的续航里程预测模型,输出燃料电池车辆下一时刻的预估车辆能量消耗和预估速度;
[0133]
计算模块300,用于将下一时刻的预估车辆能量消耗和预估速度作为新的连续行驶数据,输入至预设的续航里程预测模型进行迭代计算,直至满足预设迭代条件,得到燃料电池车辆的续航里程估计结果。
[0134]
进一步地,在一些实施例中,在将当前时刻的连续行驶数据输入至预设的续航里程预测模型之前,输出模块200,还包括:
[0135]
获取单元,用于获取多个目标燃料电池车辆的历史连续行驶数据,其中,连续行驶数据包括连续行驶时间、储氢罐温度、储氢罐压力、储氢罐容积、动力电池剩余容量、车辆行驶速度和电池包输出功率中的至少一种;
[0136]
训练单元,用于根据历史连续行驶数据生成训练样本,并利用训练样本训练续航里程基础模型,得到初始续航里程预测模型;
[0137]
微调单元,用于基于连续行驶数据微调训练初始续航里程预测模型,得到预设的续航里程预测模型。
[0138]
进一步地,在一些实施例中,训练单元,具体用于:
[0139]
基于预设的氢气质量计算公式,计算历史连续行驶数据中每个时刻的剩余氢气质量,得到第一行驶数据;
[0140]
对第一行驶数据进行非线性拟合得到拟合曲线,并计算历史连续行驶数据中各数据对拟合曲线的方差,并基于方差清洗掉满足预设清洗条件的数据,得到第二行驶数据;
[0141]
基于预设的数据样本格式,对第二行驶数据进行结构化处理,构建出数据量相同的不同工况的数据集,并通过预设的转换函数,对数据集进行数据归一化处理,得到训练样本。
[0142]
进一步地,在一些实施例中,续航里程基础模型为:
[0143]it
=σ(w
xi
x
t
+w
hiht-1
+w
cict-1
+bi);
[0144]ft
=σ(w
xf
x
t
+w
hfht-1
+w
cfct-1
+bf);
[0145]ct
=f
tct-1
+i
t
tanh(w
xc
x
t
+w
hcht-1
+bc);
[0146]ot
=σ(w
xo
x
t
+w
hoht-1
+w
coct-1
+bo);
[0147]ht
=o
t
tanh(c
t
);
[0148]
其中,其中,σ表示sigmoid函数,i
t
表示输入门,f
t
表示遗忘门,o
t
表示输出们,c
t
表示单元激活向量,h
t
为隐藏层单元,b分别为各项的偏差值,t为车辆运行时刻,tanh为激活函数,x
t
为当前时刻的数据,h
t-1
为上一时刻的输出数据,w
xi
为输入门与输入特征向量的权重矩阵,w
hi
为输入门与隐藏层单元向量的权重矩阵,w
ci
为输入门与激活向量的权重矩阵,bi为输入门偏差值,w
xf
为遗忘门与输入特征向量的权重矩阵,w
hf
为遗忘门与隐藏层单元向量的权重矩阵,w
cf
为遗忘门与激活向量的权重矩阵,bf为遗忘门偏差值,w
xc
为单元激活向量与输入特征向量的权重矩阵,w
hc
为单元激活向量与隐藏层单元向量的权重矩阵,bc为单元激活向量偏差值,w
xo
为输出门与输入特征向量的权重矩阵,w
ho
为输出门与隐藏层单元向量的权重矩阵,w
co
为输出门与隐藏层单元向量的权重矩阵,bo为输出门偏差值。
[0149]
进一步地,在一些实施例中,预设迭代条件为:
[0150][0151][0152]
其中,m
t0
为当前时刻剩余氢气质量,soc
t0
为当前时刻动力电池剩余电量,δm为下一时刻的车辆能量消耗预估,δ
soc
为下一时刻的车辆速度预估,t0为当前时刻,n为迭代次数。
[0153]
进一步地,在一些实施例中,计算模块,包括:
[0154]
计算单元,用于基于预设的续驶里程预估公式,得到燃料电池车辆的续航里程估计结果,其中,预设的续驶里程预估公式为:
[0155][0156]
其中,v
t
为当前时刻车速,v
t+1
为下一时刻车速,δt为两个时刻的时间差。
[0157]
根据本技术实施例的燃料电池车辆的续航里程估算装置,通过获取燃料电池车辆当前时刻的连续行驶数据,输入至预设的续航里程预测模型,并输出燃料电池车辆下一时刻的预估车辆能量消耗和预估速度,将其作为新的连续行驶数据输入至预设的续航里程预测模型进行迭代计算,从而得到燃料电池车辆的续航里程估计结果。由此,解决了相关技术中的估算方法会降低车辆的运行模式、运行工况以及功率等变化的精准度,且缺乏部分车型的数据样本以及泛化能力弱等问题,通过基于lstm和迁移学习的燃料电池车续航里程的估算方法,增强了预测模型的泛化能力,从而提高了实车数据预测的精准度。
[0158]
图5为本技术实施例提供的电子设备的结构示意图。该电子设备可以包括:
[0159]
存储器501、处理器502及存储在存储器501上并可在处理器502上运行的计算机程序。
[0160]
处理器502执行程序时实现上述实施例中提供的燃料电池车辆的续航里程估算方法。
[0161]
进一步地,电子设备还包括:
[0162]
通信接口505,用于存储器501和处理器502之间的通信。
[0163]
存储器501,用于存放可在处理器502上运行的计算机程序。
[0164]
存储器501可能包含高速ram存储器,也可能还包括非易失性存储器(non-volatile memory),例如至少一个磁盘存储器。
[0165]
如果存储器501、处理器502和通信接口505独立实现,则通信接口505、存储器501和处理器502可以通过总线相互连接并完成相互间的通信。总线可以是工业标准体系结构(industry standard architecture,简称为isa)总线、外部设备互连(peripheral component,简称为pci)总线或扩展工业标准体系结构(extended industry standard architecture,简称为eisa)总线等。总线可以分为地址总线、数据总线、控制总线等。为便于表示,图5中仅用一条粗线表示,但并不表示仅有一根总线或一种类型的总线。
[0166]
可选的,在具体实现上,如果存储器501、处理器502及通信接口505,集成在一块芯片上实现,则存储器501、处理器502及通信接口505可以通过内部接口完成相互间的通信。
[0167]
处理器502可能是一个中央处理器(central processing unit,简称为cpu),或者是特定集成电路(application specific integrated circuit,简称为asic),或者是被配置成实施本技术实施例的一个或多个集成电路。
[0168]
本技术实施例还提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如上的燃料电池车辆的续航里程估算方法。
[0169]
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本技术的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或n个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
[0170]
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者
隐含地包括至少一个该特征。在本发明的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
[0171]
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不是必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
[0172]
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1