转镜激光雷达系统的制作方法
1.本技术涉及激光雷达技术领域,特别涉及一种转镜激光雷达系统。
背景技术:
2.自从激光雷达进入自动驾驶领域以来,激光雷达在车载领域的发展如火如荼。最初始自于velodyne的机械旋转扫描雷达应用范围最广,取得了大量的实验数据,但由于其机械旋转结构,难以通过严苛的车规认证,从而无法应用在量产车辆上,并且还有价格、体积、分辨率等问题。
3.替代方案包括混合固态雷达和全固态雷达,前者包括mems微振镜方案、转镜方案以及棱镜方案,每种方案都有量产产品推出,已经或者即将大规模安装在量产车型上,是一种目前比较成熟的方向。
4.混合固态雷达中,转镜方案目前采用的基本都是一维转镜,即各个反射面相对旋转轴的偏转角度相同,因此反射后的光束也是指向同样的位置,一般搭配一个单轴微振镜或者摆镜使用,或者发射/接收部分采用将多个封装后的单通道发射/接收器件堆叠以增加线束的方式,但此方式能达到的扫描线数非常有限,整体分辨率也受限于此。
技术实现要素:
5.基于此,为解决上述术问题,本技术提供一种转镜激光雷达系统,能够提高分辨率。
6.本技术实施例提供一种转镜激光雷达系统,包括:
7.激光发射阵列,配置成产生发射光束;
8.发射光学组件,设置在发射光束传播方向上所述激光发射阵列的下游以接收所述发射光束;
9.二维多面转镜,设置在发射光束传播方向上所述发射光学组件的下游,包括绕旋转轴可转动地设置的多个反射镜面,所述反射镜面配置成将经由所述发射光学组件的所述发射光束反射形成射向扫描视场的扫描光束;
10.回波接收透镜组,设置在回波光束传播方向上,配置成聚焦所述扫描光束在所述扫描视场产生的回波光束;以及
11.接收探测器阵列,设置在回波光束传播方向上所述回波接收透镜组的下游,配置成接收所述回波光束;
12.其中,所述二维多面转镜的多个所述反射镜面相对所述旋转轴的夹角不等。
13.在其中一个实施例中,所述二维多面转镜的重心位于旋转轴上,所述二维多面转镜中所述反射镜面的数量为偶数。
14.在其中一个实施例中,所述激光发射阵列采用eel阵列,所述激光发射阵列包括激光发射阵列芯片驱动板、激光发射阵列芯片及合光组件,所述激光发射阵列芯片驱动板驱动所述激光发射阵列芯片发光,所述合光组件将所述激光发射阵列芯片的光束合束;
15.或者,所述激光发射阵列使用面发射的n*m的vcsel阵列组成的i*j发射阵列,其中,n、m为大于等于1的整数且i、j不同时等于1,i、j分别小于等于n、m;
16.或者,所述激光发射阵列使用光纤激光器通过分光或者衍射器件形成i*j发射阵列。
17.在其中一个实施例中,所述激光发射阵列芯片包括在所述发射激光发射阵列芯片驱动板上并排设置的两个或两个以上1*n阵列芯片;
18.所述激光发射阵列芯片包括在所述发射激光发射阵列芯片驱动板上并排设置的1*m阵列芯片和1*n阵列芯片,其中,m≠n;
19.或者,所述激光发射阵列芯片采用1*2n单阵列芯片;
20.或者,所述激光发射阵列芯片包括两个或两个以上1*n阵列芯片,每一所述1*n阵列芯片固晶在对应的激光发射阵列芯片驱动板上,两个或两个以上的所述驱动板激光发射阵列芯片驱动板并排设置。在其中一个实施例中,所述激光发射阵列芯片为1*n阵列芯片,两个所述激光发射阵列芯片在所述发射激光发射阵列芯片驱动板上并排设置,所述合光组件用以将两个所述激光发射阵列芯片发出的第一光束和第二光束合束在一起形成2*n的阵列,所述激光发射阵列芯片驱动板选择性地将所述激光发射阵列芯片的阵列中的良好发光点点亮,以在2*n阵列上点亮n个发光点。
21.在其中一个实施例中,所述接收探测器阵列采用apd阵列,所述接收探测器阵列使用2*n的阵列,以一对一匹配所述激光发射阵列;或者,所述接收探测器阵列使用1*n阵列,每个单元对应接收所述激光发射阵列的2*1单元的照射区域;
22.或者,所述接收探测器阵列(600)采用sipm或spad阵列。
23.在其中一个实施例中,所述合光组件包括两个第一光束整形元件、第一反射镜、第二反射镜及第二光束整形元件,所述第一反射镜与所述第二反射镜交错放置,两个所述第一光束整形元件分别对所述第一光束和所述第二光束初步整形,初步整形后的所述第一光束依次射向所述第一反射镜、所述第二反射镜及所述第二光束整形元件,初步整形后的所述第二光束依次射向所述第二反射镜及所述第二光束整形元件。
24.在其中一个实施例中,所述激光发射阵列芯片驱动板包括电路基板及设置在所述电路基板上的驱动电路阵列和选通器件,所述驱动电路阵列通过所述选通器件将所述激光发射阵列芯片中相应的发光点点亮。
25.在其中一个实施例中,所述发射光学组件包括光束合束整形元件及反射镜组,所述反射镜组包括小反射镜及大镜面,所述发射光束沿发射光束传播方向经过所述光束合束整形元件后射向所述小反射镜后反射到所述二维多面转镜,所述回波光束经所述二维多面转镜反射到所述大镜面上再被反射到所述回波接收透镜组;
26.或者,所述发射光学组件包括光束合束整形元件及穿孔反射镜,所述发射光束沿发射光束传播方向经过所述光束合束整形元件后射向所述穿孔反射镜中的开孔再入射到所述二维多面转镜,所述回波光束经所述二维多面转镜反射到所述穿孔反射镜后反射到所述回波接收透镜组;
27.或者,所述发射光学组件包括光束合束整形元件及半透半反镜,所述发射光束沿发射光束传播方向经过所述光束合束整形元件后射向所述半透半反镜被透射到所述二维多面转镜,所述回波光束经所述二维多面转镜反射到所述半透半反镜后反射到所述回波接
收透镜组。
28.在其中一个实施例中,所述激光发射阵列、所述光束合束整形元件、所述发射光学组件、所述回波接收透镜组及所述接收探测器阵列在所述二维多面转镜的两侧对称设置。
29.本技术的转镜激光雷达系统至少具有以下有益效果:本技术的转镜激光雷达系统中,二维多面转镜各个反射镜面与旋转轴的夹角不同,每个反射镜面可以将入射光束转向垂直方向的不同区域,在不增加元器件的情况下增加了几倍的垂直分辨率,反射镜面也比微振镜等光束转向器件的镜面大很多,可以接收到更多的回波,增大测距范围和信噪比。
附图说明
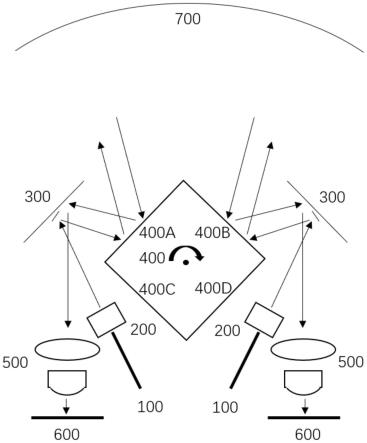
30.图1为本技术一实施例的转镜激光雷达系统的布局结构图;
31.图2为图1中的二维多面转镜的扫描视场示意图;
32.图3为本技术另一实施例的转镜激光雷达系统的二维多面转镜的结构示意图;
33.图4为本技术又一实施例的转镜激光雷达系统的二维多面转镜的结构示意图;
34.图5为激光发射阵列的光路示意图;
35.图6为图5中的激光发射阵列芯片驱动板的结构示意图;
36.图7为激光发射阵列的光斑合束前后的示意图。
37.图中各元件标号如下:
38.激光发射阵列100;光束合束整形元件200;反射镜组300;二维多面转镜400;回波接收透镜组500;接收探测器阵列600;扫描视场700;
39.反射镜面400a、反射镜面400c、反射镜面400d、反射镜面400b;
40.激光发射阵列芯片驱动板110、激光发射阵列芯片120、第一光束整形元件130、第一反射镜140、第二反射镜150、第二光束整形元件160、目标视场170;
41.电路基板111、驱动电路阵列112、选通器件113。
具体实施方式
42.为了便于理解本技术,下面将参照相关附图对本技术进行更全面的描述。附图中给出了本技术的较佳实施方式。但是,本技术可以以许多不同的形式来实现,并不限于本文所描述的实施方式。相反地,提供这些实施方式的目的是使对本技术的公开内容理解的更加透彻全面。
43.需要说明的是,当元件被称为“设置于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。当一个元件被认为是“耦合”另一个元件,它可以是直接耦合到另一个元件或者可能同时存在居中元件,本文所谓的“接合”是指两个元件具有动力传输的联接。本文所使用的术语“垂直的”、“水平的”、“左”、“右”、“上方”、“下方”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式,应理解的是,这些与空间相关的术语旨在除了附图中描绘的取向之外还涵盖设备在使用中或在操作中的不同取向,例如,如果设备在附图中被翻转,则描述为在其他元件或特征“下方”或“之下”的元件或特征将被取向为在其他元件或特征“上方”。因此,示例术语“下方”可以包括上方和下方两种取向。
44.除非另有定义,本文所使用的所有的技术和科学术语与属于本技术的技术领域的技术人员通常理解的含义相同。本文中在本技术的说明书中所使用的术语只是为了描述具体的实施方式的目的,不是旨在于限制本技术。本文所使用的术语“及/或”和“和/或”包括一个或多个相关的所列项目的任意的和所有的组合。
45.请参阅图1,本技术实施例提供一种转镜激光雷达系统,包括激光发射阵列100、光束合束整形元件200、反射镜组300、二维多面转镜400、回波接收透镜组500及接收探测器阵列600。其中,激光发射阵列100配置成产生发射光束;光束合束整形元件200、反射镜组300组成发射光学组件,设置在发射光束传播方向上激光发射阵列100的下游,以接收激光发射阵列100的发射光束;二维多面转镜400,设置在发射光束传播方向上所述发射光学组件的下游,包括绕旋转轴可转动地设置的反射镜面,反射镜面配置成将经由发射光学组件的发射光束反射形成射向扫描视场700的扫描光束;回波接收透镜组500设置在回波光束传播方向上,配置成聚焦扫描光束在扫描视场700产生的回波光束;接收探测器阵列600,设置在回波光束传播方向上回波接收透镜组500的下游,配置成接收所述回波光束。
46.图示实施例中,转镜激光雷达系统为双视场激光雷达,即,激光发射阵列100、光束合束整形元件200、反射镜组300、回波接收透镜组500及接收探测器阵列600在二维多面转镜400的两侧对称设置。
47.工作时,激光发射阵列100发出的发射光束经过光束合束整形元件200后射向反射镜组300,被其中的小反射镜反射到二维多面转镜400的两个不同倾角的反射镜面400a和反射镜面400b,然后发射到左右两个视场,回波光束经二维多面转镜400的反射镜面400a和反射镜面400b反射到反射镜组300的大镜面上,再被反射到回波接收透镜组500,会聚后被接收探测器阵列600接收并放大。
48.其中,反射镜组300也用穿孔反射镜替换,激光发射阵列100经光束合束准直后通过穿孔反射镜中的开孔入射到二维多面转镜400表面,穿孔反射镜反射到回波接收透镜组500,再被探测器阵列600接收放大。在其它实施例中,反射镜组300也用半透半反镜代替,发射光束沿发射光束传播方向经过光束合束整形元件200后射向半透半反镜,发射光束透射到二维多面转镜400的反射镜面上,半透半反镜反射经二维多面转镜400反射的回波光束到回波接收透镜组500。反射镜组300、穿孔反射镜或者半透半反镜用于提升和发射同轴的接收系统的效率,从而提高信噪比。
49.二维多面转镜400用于提升垂直方向的扫描区域,从而提高垂直方向的分辨率,而且较大的镜面相较其它方案可以接收更多的回波光束,以增大信噪比或者测量距离。具体地,转镜激光雷达系统左侧部分对应左侧视场,其中四个分视场扫描顺序为反射镜面400a、反射镜面400c、反射镜面400d、反射镜面400b;转镜激光雷达系统右侧部分对应右侧视场,其中四个分视场扫描顺序为反射镜面400b、反射镜面400a、反射镜面400c、反射镜面400d,如图2中所示。二维多面转镜400绕旋转轴旋转一圈后完成对整个视场700的扫描。
50.为增加垂直方向的视场,例如为对应垂直方向30
°
的视场,二维多面转镜400的反射镜面400b、反射镜面400a、反射镜面400c、反射镜面400d的相对旋转轴的夹角可以分别设置为3.75
°
、11.25
°
、-3.75
°
和-11.25
°
。
51.显然地,二维多面转镜400中反射镜面的数量也可使用其它面数,如6面(包括反射镜面400a至反射镜面400f)和8面(包括反射镜面400a至反射镜面400h),分别如图3和图4中
所示。
52.二维多面转镜400的反射镜面数量为偶数更容易保持重心在旋转轴上,因而可保持二维多面转镜400旋转时的稳定。当然,二维多面转镜400的反射镜面数量为奇数经过设计后也可以使用。
53.二维多面转镜400的反射镜面相对所述旋转轴倾斜设置,多个反射镜面相对旋转轴的夹角不等,例如前文所述的3.75
°
、11.25
°
、-3.75
°
和-11.25
°
,反射镜面400a的夹角(3.75
°
)与反射镜面400d的夹角(-3.75
°
)互为相反数,反射镜面400b的夹角(-11.25
°
)与反射镜面400c的夹角(11.25
°
)互为相反数,从而可具有30
°
的垂直视场角。
54.二维多面转镜400在与旋转轴垂直的平面上的截面形状呈近似正多边形,如图1中的正方形,或图3、图4中所示的正六边形、正八边形。
55.二维多面转镜400的反射镜面可以增大垂直分辨率,或者在一定分辨率的情况下减少发射接收阵列中的激光发射端ld和激光接收端pd个数。考虑到通常的120
°
的水平视场角(即单侧60
°
视场角),二维多面转镜400的反射镜面数量不宜超过10面,即单面反射镜面对应的水平视场为36
°
角:入射光束和出射光束之间72
°
夹角,去除两边边缘部分,可以对应60
°
的目标视场角。
56.二维多面转镜400的各个反射镜面与旋转轴的夹角可顺次逐渐变化,由于二维多面转镜400的各个反射镜面与旋转轴的夹角不同,每个面可以将入射光束转向垂直方向的不同区域,在不增加元器件的情况下增加了几倍的垂直分辨率,而且多面转镜已广泛应用于打印/扫描系统很多年,产品非常成熟,其反射镜面也比微振镜等光束转向器件的镜面大很多,可以接收到更多的回波,增大测距范围和信噪比。
57.基于裸片(die)的激光发射阵列100、接收探测器阵列600用于形成高集成度、高垂直分辨率发射/接收光束,和二维多面转镜400一起形成超高的垂直方向分辨率。
58.激光发射阵列100可优先使用两个1*n的eel(边发射激光器)阵列,激光发射阵列100的光路如图5中所示,包括激光发射阵列芯片驱动板110、激光发射阵列芯片120(两个1*n阵列)、第一光束整形元件130、第一反射镜140、第二反射镜150及第二光束整形元件160。激光发射阵列芯片120为两个且为1*n阵列芯片。
59.工作时,两个激光发射阵列芯片120经由激光发射阵列芯片驱动板110驱动发出光束,其中一个激光发射阵列芯片120发出的第一光束经过第一光束整形元件130对快轴的大发散角进行初步的整形后,射向和光路成45
°
角放置的第一反射镜140,然后垂直向上出射,被与此光路呈45
°
角放置的第二反射镜150发射后向水平方向出射;其中另一个激光发射阵列芯片120发出的第二光束经过第一光束整形元件130初步整形后射向与第二反射镜150,最后与第一光束合束后一同经第二光束整形元件160整形后出射到光束扫描器件或者目标视场170。
60.其中,反射镜第一反射镜140、第二反射镜150交错放置分别针对来自两个激光发射阵列芯片120的光束,可将两个1*n阵列的激光发射阵列芯片120的光束相邻合束在一起,合束并准直后的光束形成2*n的阵列。通过以上光学设计将筛选后,可以将不良发光点互补的1*n阵列的激光发射阵列芯片120发出的光合束,然后通过激光发射阵列芯片驱动板110选择将每个激光发射阵列芯片120的阵列中相应的良好发光点按照需求点亮,在2*n的阵列上点亮n个发光点,如图7中所示。
61.如图6所示,激光发射阵列芯片驱动板110的电路基板111上驱动电路阵列112通过选通器件113将激光发射阵列芯片120中相应的单元驱动发光,形成n个激光光斑,再合束在一起,如图7中所示。
62.激光发射阵列100除如前文所述使用两个1*n的eel阵列外,还可采用以下几种形式:
63.激光发射阵列芯片120也可以是不同单元的阵列:1*m阵列和1*n阵列,其中,m≠n;
64.激光发射阵列芯片120采用1*2n单阵列芯片,代替两个具有相同单元的1*n阵列或者两个具有不同单元的芯片;
65.激光发射阵列芯片120为两个1*n阵列芯片,分别固晶在两个驱动板(两块激光发射阵列芯片驱动板110)上,两个驱动板并排放置,然后进行合束。
66.以上实施例仅针对两个阵列芯片的合束进行了说明,此外显而易见可以使用两个以上的芯片进行合束。激光发射阵列100也可以使用vcsel(垂直腔面发射激光器)阵列芯片或者光纤激光器通过分光形成的激光阵列。现有的vcsel单点发光功率比较低,本技术中激光发射阵列100通过多个发光点形成发光通道以增大功率。激光发射阵列100采用i*j发射阵列,i、j为大于等于1的整数,且i、j不同时等于1。激光发射阵列100使用面发射的n*m的vcsel阵列组成的i*j发射阵列,其中,n、m为大于等于1的整数,且i、j分别小于等于n、m。或者,激光发射阵列100使用光纤激光器通过分光或者衍射器件形成i*j发射阵列。
67.接收探测器阵列600可采用apd(雪崩二极管)阵列,以通过与激光发射阵列100同样的方式匹配激光发射阵列100的发射端发光点的布局。接收探测器阵列600使用2*n的阵列以匹配发射端,以达到一一对应的目的;接收探测器阵列600也可以使用1*n阵列,每个单元对应发射端的2*1单元的照射区域。接收探测器阵列600的接收端是表面接收,和发射端的面发射不一样,因此可以并排放置。接收探测器阵列600也可以使用sipm(硅光电倍增管)或者spad(单光子雪崩二极管)阵列进行接收。
68.由于转镜激光雷达所需要的是1*n的发射光束,而实际生产制造中尤其是对于激光雷达用的高功率eel(边缘发射激光器)芯片,其单通道良率就比较低,多通道阵列芯片尤其是十通道以上的阵列芯片良品率更低,如果选用单条完好的1*n阵列芯片来做发射端,过低的良率和过高的成本根本无法接受。接收端同样如此。本技术通过以上的激光发射阵列100、接收探测器阵列600设置,使得晶圆上几乎所有的发光点都可以使用,可以大幅提高垂直方向扫描线数的同时降低成本。
69.本技术提出了一种基于二维多面转镜、穿孔反射镜/反射镜组/半透半反镜和发射接收阵列组成的双视场转镜激光雷达系统,可以较为容易地在目标视场(如120
°
*30
°
)内达成200线~400线的高分辨率,远超当前的雷达,且对10%反射率目标有300m以上的测距。根据二维多面转镜的反射镜面个数*发射接收阵列的点数来计算线数,比如用6面转镜,1*50的发射接收阵列的话,线数可达到300线;根据单个发光点的功率结合接收孔径的尺寸计算的测距可达到300m。
70.本技术的转镜激光雷达系统中,二维多面转镜各个反射镜面与旋转轴的夹角不同,每个反射镜面可以将入射光束转向垂直方向的不同区域,在不增加元器件的情况下增加了几倍的垂直分辨率,反射镜面也比微振镜等光束转向器件的镜面大很多,可以接收到更多的回波,增大测距范围和信噪比;穿孔反射镜/反射镜组相对半透半反镜损失超过75%
的发射能量来说优越很多,也可有效提高信噪比;而基于晶圆原始切割形成的发射阵列/接收阵列直接将线束提高且具有很高的集成度,配合二维多面转镜可以达到极高的垂直分辨率以及点频。综上所述,本技术的转镜激光雷达系统可在提升系统分辨率的同时,降低成本、简化光束转向机构,而且因集成度高而缩小了体积。
71.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
72.以上所述实施例仅表达了本技术的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本技术构思的前提下,还可以做出若干变形和改进,这些都属于本技术的保护范围。因此,本技术专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1