检验罩幕盒外表面的方法与检验罩幕盒微粒的方法与系统与流程
1.本揭露的实施方式是有关于检验罩幕盒外表面的方法与检验罩幕盒微粒的方法与系统。
背景技术:
2.于集成电路(ic)设计期间,在基材,例如晶圆上产生了一些用于集成电路处理的不同步骤的集成电路的图案。这些图案可通过在基材的光阻层上投影,例如成像,光罩的布局图案来产生。微影制程将光罩的布局图案转移至基材的光阻层,以使得蚀刻、植入、或其他步骤仅能作用在基材的预定区域。一般而言,倍缩光罩,例如,极紫外线(euv)光罩在罩幕盒内转移于不同的euv微影系统间。每个罩幕盒具有外盒以及外盒内的内盒。在euv微影系统外开启外盒,并且从外盒取出内盒。将内盒转移至euv微影系统。在euv微影系统内打开内盒,并且会自内盒取出euv光罩以用于euv显影。附着于内盒的外表面上的微粒可能转移至euv微影系统,并且可能沉积于euv光罩上或用于euv微影的光学仪器上,因此可能导致产生于基材上的阻剂图案的关键尺寸(cd)内的不均匀性。因此,为了执行微影制程而将euv光罩转移至微影系统中时,期望能将euv光罩携带于干净的内盒内。
技术实现要素:
3.依照本揭露的一些实施方式,检验罩幕盒外表面的方法包含将空气流导引在罩幕盒的外表面上的多个位置中的第一位置,并利用导引的空气流从罩幕盒的外表面上的第一位置移除一或多个微粒。此方法亦包含从罩幕盒的外表面上的第一位置抽取散射空气,并确定从第一位置抽取的散射空气内的微粒的数量为第一位置处的微粒采样数。此方法进一步包含移动罩幕盒并将空气流导引到罩幕盒的外表面上的多个位置中的其他位置,以确定在其他位置抽取的散射空气中的微粒的采样数。此方法亦包含依照在多个位置所确定的微粒采样数,产生罩幕盒的外表面上的微粒图,以使得对于多个位置中的每一个位置而言,在抽取的散射空气中的微粒采样数与在这位置处罩幕盒的外表面上的微粒数成正比。
4.依照本揭露的一些实施方式,检验罩幕盒微粒的方法包含将气流导引到罩幕盒的外表面上的多个位置,且通过所导引的气流从罩幕盒的外表面上的多个位置中的每一个移除一或多个微粒。此方法亦包含在多个位置从罩幕盒的外表面采样散射气体,以确定来自多个位置的散射气体中的第一微粒数。对于多个位置中的每一个位置,散射气体中的第一微粒数与在那位置处的罩幕盒的外表面上的微粒数成正比。
5.依照本揭露的一些实施方式,检验罩幕盒微粒的系统包含气体源、罩幕盒、电路、以及具有连接至第一管子的第一端的喷嘴的第一管子。此系统亦包含连接于气体源与第一管子的第二端之间的气体流控制器,且将气体源经由第一管子所供应的气流导出喷嘴。此系统还包含支承罩幕盒,且在喷嘴上方于两个垂直水平方向上移动罩幕盒的水平平台。气体流控制器将气流导引到罩幕盒的外表面的多个位置,以通过导引的气流从罩幕盒的外表面移除一或多个微粒。此系统包含微粒计算器耦合至第二管子的第一端。微粒计算器经由
第二管子的第二端从多个位置将散射气体抽入微粒计算器,以确定从多个位置的罩幕盒的外表面移除的微粒的采样数。
附图说明
6.从以下详细描述及附随的图,能最佳地了解本揭露的内容。要强调的是,根据业界的标准实务,各类特征并未依比例绘制,并只用以图解说明为目的。事实上,为了阐明讨论的内容,各类特征的尺寸均可任意地增加或缩减。
7.图1是绘示在半导体基材上产生光阻图案的制程流程;
8.图2是绘示用以储存并转移euv光罩的双重罩幕盒的示意图;
9.图3是绘示依照本揭露的一些实施方式在半导体基材上产生光阻图案的制程流程;
10.图4是绘示用以在晶圆上产生光阻图案的极紫外光微影(euvl)曝光装置的示意图;
11.图5a与图5b是绘示依照本揭露的一些实施方式的装载于平台上的罩幕盒以及检验罩幕盒上的微粒的检验系统;
12.图6是绘示依照本揭露的一些实施方式的检验罩幕盒上的微粒的控制系统;
13.图7是绘示依照本揭露的一些实施方式的检验罩幕盒上的微粒的示范制程的流程图;
14.图8a与图8b是绘示依照本揭露的一些实施方式的检验罩幕盒上的微粒的设备。
15.【符号说明】
16.15:光阻层、阻剂层
17.29:euv辐射束
18.100:制程流程
19.101:euv辐射源
20.102:阻剂涂布操作
21.104:施加后烘烤操作
22.105:罩幕接收操作
23.108:罩幕装载及曝光操作
24.110:曝光后烘烤操作
25.112:显影操作
26.200:双重罩幕盒
27.202:外盒壳
28.204:外盒门
29.205:倍缩光罩
30.205a:光学仪器
31.205b:光学仪器
32.205c:反射罩幕
33.205d:缩小投影光学仪器
34.205e:缩小投影光学仪器
35.206:内盒盖
36.208:内盒基板
37.210:半导体基材
38.220:内盒
39.221:侧外表面
40.222:上外表面
41.230:外盒
42.300:制程流程
43.302:转移双重盒操作
44.304:取回内盒操作
45.306:检验内盒操作
46.308:清洁内盒操作
47.310:晶圆印刷操作
48.400:曝光设备
49.406:真空压力控制器
50.408:压力感测器
51.500:检验系统
52.502:水平平台
53.504:内盒、罩幕盒
54.506:夹钳
55.508:距离
56.510:垂直平台
57.511:上表面
58.512:气流
59.514:气流
60.516:喷嘴
61.518:外表面
62.520:制图系统
63.521:喷嘴
64.522:第一管子
65.523:第二管子
66.524:第三管子
67.526:平面
68.530:信号
69.531:信号
70.532:记忆体
71.535:平台控制器
72.565:微粒计数器
73.572:气体槽
74.575:气体流控制器
75.600:控制系统
76.630:分析器模块
77.640:主控制器
78.700:制程
79.800:计算机系统
80.801:计算机
81.802:键盘
82.803:鼠标
83.804:显示器
84.805:光盘只读记忆体驱动器、光盘驱动器
85.806:磁盘驱动器
86.811:微处理单元
87.812:只读记忆体
88.813:随机存取记忆体
89.814:硬盘
90.815:总线
91.821:光盘
92.822:磁盘
93.s710:操作
94.s720:操作
95.s730:操作
96.s740:操作
97.s750:操作
98.s760:操作
99.θ:入射角、角度
具体实施方式
100.以下的揭露提供了许多不同实施方式或实施例,以实施所提供的标的的不同特征。以下所描述的构件与安排的特定实施例是用以简化本揭露。当然这些仅为实施例,并非作为限制。举例而言,于描述中,第一特征于第二特征上或上方的形成,可包含第一特征与第二特征以直接接触形成的实施方式,亦可包含额外特征可能在第一特征与第二特征之间形成的实施方式,如此第一特征与第二特征可能不会直接接触。除此之外,本揭露可能会在各实施例中重复参考数字和/或字母。此重复是为了简洁与阐明的目的,其本身并非来界定所讨论的各实施方式和/或配置间的关系。
101.此外,在此可能使用空间上的相对用语,诸如“在
…
之下(beneath)”、“在
…
下面(below)”、“较低(lower)”、“在
…
上面(above)”、“较高(upper)”与相似用语,以简明描述如图所示的一元件或特征与另一(另一群)元件或特征的关系的叙述。空间上的相对用语意欲包含装置在使用或操作中除了图上所描绘的定向之外的不同定向。设备可另外定向(旋转
90度或其他定向),且在此使用的空间关系叙述可同样依此解释。此外,用语“由
…
制成(being made of)”可能意指“包含(comprising)”或“由
…
组成(consisting of)”。在本揭露中,词组“a、b和c的其中之一(one of a,b and c)”所指的是a、b和/或c(a、b、c、a和b、a和c、b和c、或a和b和c),除非另外描述,否则并非指的是来自a的一构件、来自b的一构件与来自c的一构件。
102.在一些实施方式中,倍缩光罩储存于罩幕盒内并转移于ic处理站之间,在例如ic处理站的极紫外线微影系统间。在一些实施方式中,使用具有封在外盒内的内盒的双重罩幕盒来转移倍缩光罩。这些倍缩光罩位于内盒内。当使用倍缩光罩于euv微影系统内时,将双重罩幕盒的外盒开启,并将此内盒,包含内盒内的倍缩光罩,转移至euv微影系统中。因此,在内盒与倍缩光罩转移至euv微影系统前,内盒,包含内盒的外表面应当是干净的。因此,双重罩幕盒的内盒在转移至euv微影系统内前需经过检验,且如果内盒不干净且具有微粒在内盒的外表面上,可能要清洁此内盒。在一些实施方式中,在转移至euv微影系统与独立运作的机台前,会离线检验与清洁双重盒的内盒。
103.一种检验倍缩光罩的内盒的方式是从内盒的外表面的不同位置捕捉内盒外部的表面的影像,检验捕捉到的影像,例如放大的捕捉的影像,并寻找和计算捕捉到的影像中的微粒。捕捉及处理影像可能会耗时许久,并且可能需旋转内盒,以从内盒的单一视角捕捉影像。
104.在一些实施方式中,将气流,例如空气流,导引至内盒的外表面。可导引气流通过喷嘴,以对附着在内盒的外表面的微粒施加压力,借以从内盒的外表面喷出一或多个微粒。利用返回内盒的外表面的散射空气运载所喷出的微粒。在一些实施方式中,例如透过吸入微粒计数器的方式,收集来自内盒的外表面且包含一或多个所喷出的微粒的散射空气,其中微粒计数器确定所喷出的微粒的数量。在一些实施方式中,依照导引至内盒的外表面的气流的速率,以及导引气流至内盒的外表面的每个预定位置的时间长度,在预定位置处的已知百分比的微粒自内盒的外表面喷出。因此,微粒计数器在每个预定位置所计算的微粒的数量与附着在内盒的外表面的微粒的数量成正比。因此,附着在内盒的外表面的微粒的数量可从微粒计数器所计算出的喷出的微粒的数量且利用比例来判定。在一些实施方式中,气流在气流范围覆盖的区域中将微粒喷出,因此,微粒计数器所计算的喷出的微粒的数量对应于气流所覆盖的面积。因此,在一些实施方式中,微粒计数器所计算出的喷出微粒的数量是内盒的表面积的微粒密度(例如每单位面积的微粒数量)。
105.在一些实施方式中,可比较附着于内盒的外表面的微粒的数量或微粒的密度与微粒的临界数量或微粒的临界密度,并且如果在单一或多个点上附着于内盒外表面的微粒的数量或微粒的密度,超过微粒的临界数量或微粒的临界密度,可指定清洁此内盒。
106.在一些实施方式中,倍缩光罩安装于在x方向及y方向上侧向移动此倍缩光罩的水平平台上的喷嘴上方。用以导引气流的喷嘴设置在垂直平台上。垂直平台在z方向上下移动喷嘴。通过移动垂直平台来调整喷嘴与内盒的外表面之间的距离。在一些实施方式中,安装垂直平台的上表面上的喷嘴,以使得气流以相对于与内盒的外表面的垂直平面成一特定角度导引。因此,利用微粒计数器沿相对于垂直平面的相反角度收集来自内盒的外表面的散射气体。在一些实施方式中,调整此特定角度,以提升微粒计数器收集来自内盒的外表面的散射气体及散射气体所携带的微粒的效率。
107.水平平台在xy平面上移动,并且将空气流导引至内盒的外表面上的多个位置。此水平平台会在多个位置的每一个位置上停留一段特定时间。如上所提及的,在水平平台于每一个位置停留的特定时间的期间,微粒计数器收集来自内盒的外表面的散射气体。此微粒计数器判定出从内盒的外表面所喷出并由散射气体所携带的微粒的数量。如所述,在每个位置所判定的微粒的数量与内盒的外表面上的微粒的数量成正比。因此,基于微粒计数器在多个位置上的读数,对内盒的外表面的多个位置上的微粒密度采样,并可产生内盒的外表面上的微粒密度的映射。在一些实施方式中,翻转此内盒并安装于水平平台上,借此判定,例如测量在内盒的外表面的另一边上的微粒的数量,例如微粒的密度。
108.图1是绘示通过微影系统在半导体基材上产生光阻图案的制程流程100。在一些实施方式中,通过图6的控制系统600或图8a及图8b的计算机系统800进行制程流程100。在阻剂涂布操作102中,设置,例如涂布阻剂材料的阻剂层在基材,例如晶圆或是工件的上表面上。如图4所示,光阻层15设于半导体基材210上。于施加后烘烤(pab)操作104,进行施加后烘烤,而烘烤包含光阻层15的半导体基材210,以驱离阻剂材料内的溶剂,并固化半导体基材210顶部上的光阻层。
109.在本揭露中,可交换使用术语罩幕、光罩、和倍缩光罩。此外,可交换使用术语阻剂和光阻剂。在罩幕接收操作105中,自另一个微影系统接收倍缩光罩。参照图2及图3而更详细地描述罩幕接收操作105。通过罩幕装载及曝光操作108将所接收的罩幕装载于曝光装置,曝光装置参照图4描述。罩幕装载及曝光操作108亦使用辐射源的光化辐射投影罩幕于半导体基材210的光阻层15上。在一些实施方式中,通过来自极紫外线(euv)光源的euv辐射将罩幕上的布局图案投影至光阻层15上,以在半导体基材210上的光阻层15中产生阻剂图案。于曝光后烘烤(peb)操作110,对晶圆进行曝光后烘烤,在暴露于光化辐射之后及在显影操作112中显影之前进一步烘烤阻剂层15。通过对光阻层15使用显影液,显影阻剂层的阻剂材料。对于正型阻剂材料而言,在显影操作112中,通过使用显影液显影曝光区域,然后移除显影的区域,残留的区域产生光阻层15的阻剂图案。对于负型阻剂材料而言,在显影操作112中,通过使用显影液显影非曝光区域,随后移除显影的区域,残留的区域产生光阻层15的阻剂图案。在一些实施方式中,离线且在euv微影系统的外面进行罩幕接收操作105。所接收的罩幕可储存于真空环境下的倍缩光罩库里(未绘示)。
110.图2是绘示用以储存并转移euv光罩的双重罩幕盒200的示意图。双重罩幕盒200包含封在外盒230内的内盒220。内盒220封在外盒门204以及外盒壳202之间。内盒220包含内盒基板208与内盒盖206。倍缩光罩205封在内盒基板208与内盒盖206之间。在一些实施方式中,打开外盒230,例如移除外盒门204,并将内盒220自外盒230取出。在一些实施方式中,打开内盒220,例如移除内盒盖206,并将倍缩光罩205自内盒220取出。内盒盖206有上外表面222与侧外表面221。内盒基板208也有下外表面(未绘示)与侧外表面(未绘示)。在一些实施方式中,倍缩光罩205储存于双重罩幕盒200内。倍缩光罩205在外盒230内的内盒220内部,以使得倍缩光罩205远离微粒。在一些实施方式中,倍缩光罩205在双重罩幕盒200内部转移于不同微影系统之间,以使得倍缩光罩205于转移期间远离微粒。
111.图3是绘示依照本揭露的一些实施方式的产生光阻图案于半导体基材上的制程流程300。在转移双重盒操作302中,双重盒,例如图2的双重罩幕盒200通过罩幕转移系统(未绘示)转移,以用于euv微影系统的曝光设备,如图4的曝光设备400内。在取回内盒操作304
中,从双重罩幕盒200取出内盒220。取回操作在曝光设备400外进行。从双重罩幕盒200的外盒230取出容纳倍缩光罩205的内盒220。在检验内盒操作306中,检验内盒220是否有微粒沉积于内盒220的外表面上,例如内盒盖206的上外表面222上。在一些实施方式中,内盒220是以检验系统500检验,以检验图5b中罩幕盒上的微粒。如果检验系统500判定内盒的外表面的微粒在一或多个点高于微粒的临界数量或微粒的临界密度,对内盒220的外表面进行清洁内盒操作308。在晶圆印刷操作310中,将内盒220转移至曝光设备400,且自内盒取出倍缩光罩205并使用于曝光设备400内,以如参照图1所述般投影倍缩光罩205的布局图案于晶圆的阻剂层上并显影晶圆上的阻剂图案。在一些实施方式中,晶圆印刷操作310与制程流程100的操作相同。图1的罩幕接收操作105包含转移双重盒操作302、取回内盒操作304、检验内盒操作306、以及清洁内盒操作308。在一些实施方式中,离线且在将倍缩光罩转移至曝光设备400内前,进行转移双重盒操作302、取回内盒操作304、检验内盒操作306、以及清洁内盒操作308。在一些实施方式中,于检验与清洁内盒220后,转移内盒220至真空环境下的倍缩光罩库(未绘示),并且储存光罩于倍缩光罩库内。在一些实施方式中,于罩幕装载及曝光操作108中,从倍缩光罩库取出光罩。在一些实施方式中,转移双重盒操作302、取回内盒操作304、检验内盒操作306、以及清洁内盒操作308中的一或多个于euv微影系统的载入锁定室内且在内盒220载入于euv微影系统的曝光设备400之前进行。在一些实施方式中,在清洁内盒操作308之后,在内盒220装载于微影系统的曝光设备400内之前储存内盒220。
112.图4是绘示用以在晶圆上产生光阻图案的euv微影(euvl)曝光设备400的示意图。euvl曝光设备400显示出利用euv光的图案化束的光阻涂布的基材,目标半导体基材210的曝光。曝光设备400是集成电路微影机台,例如步进机、扫描机、步进且扫描系统、直写系统、使用接触和/或近接罩幕的设备等等,其配备有一或多个光学仪器205a、205b,例如以euv辐射束29照射图案化光学仪器,例如倍缩光罩,像是与图2的倍缩光罩205相同的反射罩幕205c,以产生图案化束,以及一或多个用以投影图案化束于目标半导体基材210上的光学系统的缩小投影光学仪器205d与205e。可提供机械组件(未绘示),用于在目标半导体基材210与图案化光学仪器,例如反射罩幕205c之间产生受控制的相对运动。通过受控制的相对运动,图案化基材的不同晶粒。如进一步所示,图4的euvl曝光设备400还包含euv辐射源101,以照射半导体基材210的顶部上的目标阻剂层15。在一些实施方式中,由于气体分子吸收euv光,因此用于euv微影图案化的微影系统,例如曝光设备400处于真空环境下,以防止euv强度损失。在一些实施方式中,通过曝光设备400内的压力感测器408感测曝光设备400内的压力,并且通过与曝光设备400耦合的真空压力控制器406控制此压力。
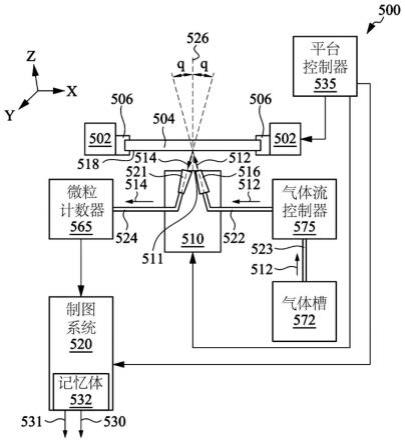
113.图5a与图5b是绘示依照本揭露的一些实施方式的装载于平台上的罩幕与用于检验罩幕盒上的微粒的检验系统500。图5a是绘示安装于水平平台502上的用以承载与图2的内盒220相同的内盒504的罩幕盒支架。在一些实施方式中,内盒504通过夹钳506,且以放置在内盒504与水平平台502之间并提供装载的容差的一距离508安装。
114.图5b是绘示包含通过夹钳506安装在水平平台502上的内盒504的检验系统500。水平平台耦合至平台控制器535,并且平台控制器535在x方向与y方向上移动内盒504。检验系统500亦包含垂直平台510、气体槽572、第一管子522、第二管子523、以及气体流控制器575。垂直平台亦耦合至平台控制器535,并且平台控制器535沿z方向上下移动垂直平台。气体流控制器575自一端经由第二管子523耦合至气体槽572。在一些实施方式中,代替气体槽572,
第二管子523连接至euv微影系统的气体源。气体流控制器575从另一端耦合至第一管子522的第一端。第一管子的第二端连接至喷嘴516,并且喷嘴516安装于垂直平台510的上表面511上。在一些实施方式中,喷嘴516是产生能移除微粒的窄空气束的锥状喷嘴。在一些实施方式中,喷嘴516是产生空气薄片的狭缝喷嘴。气体流控制器575自气体槽572抽取气流512或空气流,例如清洁干燥空气(cda),或氮气,并且传送气流512至喷嘴516。以相对于与内盒504的外表面518垂直的平面526一入射角θ导引气流512。在一些实施方式中,平台控制器535调整喷嘴516与外表面518之间的距离,并且气体流控制器575调整入射角θ。在一些实施方式中,水平平台502沿x方向移动,并且喷嘴516沿y方向移动,以扫描内盒504的外表面518。当喷嘴516沿y方向移动时,水平平台502沿x方向移动并停留于每个位置。
115.在一些实施方式中,取代微粒计数器565,成像装置(未绘示)安装于垂直平台510的上表面511上。成像装置在水平平台502移动时捕捉散射气体的影像,分析捕捉到的影像,并且判断散射气体中的微粒数量。
116.检验系统500亦包含耦合至第三管子524的第一端的微粒计数器565,并且第三管子的第二端通过喷嘴521安装于垂直平台510的上表面511上。微粒计数器565经由喷嘴521吸引自气流512反射的散射气体以及由气流512从外表面518喷出且由散射气体所携带的微粒。散射气体以及散射气体所携带的微粒自第三管子的第二端吸引并产生气流514。气流514相对于平面526具有与入射角θ对称的角度θ。在一些实施方式中,微粒计数器565判定,例如计算自外表面518喷出并由散射气体514所携带的微粒的数量。
117.在一些实施方式中,平台控制器535移动水平平台502,以使得气流512被导引至内盒504的外表面518的多个位置。在一些实施方式中,水平平台502停留在此多个位置中的每一个位置一预定的时间量,并且微粒计数器565在相同的预定量的时间中吸引,例如收集气流514。因此,微粒计数器565在多个位置对从内盒504的外表面518喷出的微粒数量采样。在一些实施方式中,平台在多个位置停留的预定时间量决定了喷出的微粒的数量与在多个位置沉积的微粒的数量间的比例因子。在一些实施方式中,气流512在这多个位置中每一个位置处覆盖内盒504的外表面518的一面积。因此,当微粒计数器565所计算出的微粒的数量除以气流512所覆盖的面积时,产生所喷出的微粒的密度的样本,并且如果乘上比例因子便产生内盒504的外表面518上的沉积微粒的密度的样本。在一些实施方式中,微粒计数器565收集散射气体的特定部分,例如散射气体的收集因子,与散射气体所携带的微粒,比例因子则包含收集因子。
118.检验系统500亦包含耦合至平台控制器535与微粒计数器565的制图系统520。制图系统520接收来自平台控制器535的多个位置,且亦接收沉积于内盒504的外表面518上的微粒的数量或密度,并产生内盒504的外表面518上微粒数量图以及微粒密度图。在一些实施方式中,制图系统520或耦合至制图系统520的主控制器(未绘示)监测内盒504的外表面518上的微粒数量图或微粒密度图,如果此图超过了微粒的数量的临界值或微粒的密度的临界值,便会产生清洁内盒504的信号530并传送至主控制器。在一些实施方式中,水平平台502在这多个位置中的每一个位置处停留的时间量从约1秒至约10秒。在一些实施方式中,气流512所覆盖的面积介于50平方毫米与100平方毫米之间,例如半径介于7毫米与10毫米之间。在一些实施方式中,制图系统520包含记忆体532,并且将内盒504的外表面518上的微粒数量图或微粒密度图依照每一个内盒220的特定id储存于记忆体532中。在检验内盒504,与计
算微粒数量图或微粒密度图时,将所产生的分布图依照内盒的id与先前所产生的图比对。判定最近所产生的图与储存于记忆体532内的图之间有异常时,制图系统520产生信号531,以指示其他euv微影系统或罩幕转移系统有错误。
119.图6是绘示依照本揭露的一些实施方式的检验罩幕盒上的微粒的控制系统600。控制系统600包含彼此耦合的分析器模块630与主控制器640。在一些实施方式中,控制系统600包含图5b的平台控制器535、图5b的制图系统520、图5b的气体流控制器575、图5b的微粒计数器565、以及图4的真空压力控制器406。在一些实施方式中,主控制器640耦合于且控制图5b的平台控制器535、图5b的制图系统520、图5b的气体流控制器575、图5b的微粒计数器565、以及图4的真空压力控制器406。在一些实施方式中,主控制器640与制图系统520直接耦合或经由分析器模块630与制图系统520耦合。在一些实施方式中,电路执行分析器模块630与主控制器640的操作。
120.在一些实施方式中并参考图5b,主控制器640命令气体流控制器575以经由第二管子523将气流512从气体槽572引导至气体流控制器575,并且亦经由第一管子522与喷嘴516将气流512引导至内盒504的外表面518。在一些实施方式中,主控制器640命令平台控制器535在x方向和y方向上移动水平平台502,以将气流512引导至外表面518的不同位置。在一些实施方式中,主控制器640命令微粒计数器565吸引气流514,气流514是经由第三管子524自外表面518的不同位置至微粒计数器565的散射气体。主控制器640命令微粒计数器565计算气流514内微粒的数量,并且传送所计算的微粒数至制图系统520。
121.在一些实施方式中,主控制器640命令平台控制器535移动水平平台502,并将气流512导引到外表面518的不同位置处达一预定时间量,例如从约1秒至约10秒。除此之外,主控制器640命令微粒计数器565计算气流514内的微粒的数量达此预定的时间量,并且传送所计算的微粒数量至制图系统520。在一些实施方式中,自外表面518的每个位置的散射气体内所计算的微粒数量正比于罩幕盒504的外表面518上微粒的数量。在一些实施方式中,分析器模块630接收所计算的微粒的数量,并比较所计算的微粒的数量与临界值。如果所计算的微粒的数量,在一或多个位置,高于临界值,分析器模块630将传送信号至主控制器640,表示罩幕盒需要清洁。
122.图7是绘示依照本揭露的一些实施方式的检验罩幕上的微粒的示范制程700的流程图。制程700或制程700的一部分可能通过图5b的系统执行。在一些实施方式中,利用参照图8a及图8b描述的计算机系统800进行和/或控制制程700或制程700的一部分。在一些实施方式中,利用上述图6的控制系统600进行制程700或制程700的一部分。方法包含操作s710,其中将空气流导引至罩幕盒的外表面上的多个位置中的第一位置。如图5b所示,将气流512,例如空气导引至罩幕盒的外表面上的多个位置中的第一位置。在操作s720中,通过来自罩幕盒的外表面上的第一位置的导引气流移除一或多个微粒。在一些实施方式中,微粒附着于罩幕盒504的外表面518。气流512从外表面518喷出,例如移除一些微粒,并自外表面518散射回来且携带所喷出的微粒。在操作s730中,抽取,例如收集来自罩幕盒的外表面上的第一位置的散射空气。如第5b所示,微粒计数器565自外表面518吸引气流514内的散射气体。气流514亦将所喷出的微粒吸引至微粒计数器。在操作s740中,将来自第一位置的所抽取的散射空气内的微粒数确定为在第一位置的微粒采样数。在操作s750中,移动罩幕盒,并将空气流引导到罩幕盒的外表面上的多个位置中的其他位置,以判断其他位置的微粒采样
数。如图5b所示,平台控制器535于x方向和y方向上移动水平平台502与安装于水平平台502的内盒504,且气流514撞击罩幕盒504的外表面518上的其他位置,并确定在其他位置处的微粒采样数。在操作s760中,依据在多个位置处的微粒采样数产生罩幕盒的外表面上的微粒图。在一些实施方式中,此图包含一或多个三维图,其中每一个三维图是绘示内盒220的每一侧的每一个采样点上的微粒的数量。
123.图8a与图8b显示依照本揭露的一些实施方式的检验罩幕盒上微粒的设备。在一些实施方式中,使用计算机系统800来进行图6的模块的功能,这些模块包含主控制器640、分析器模块630、平台控制器535、制图系统520、真空压力控制器406、气体流控制器575、以及微粒计数器565。在一些实施方式中,使用计算机系统800以执行图7的制程700。
124.图8a是进行用以检验罩幕盒上的微粒的设备的功能的计算机系统的示意图。先前实施方式的所有或部分的制程、方法和/或操作可使用计算机硬件与执行于其上的计算机程序来实现。在图8a中,计算机系统800配备有包含光盘只读记忆体(例如,光盘只读记忆体或数字多功能光盘只读记忆体)驱动器805与磁盘驱动器806的计算机801、键盘802、鼠标803、与显示器804。
125.图8b是绘示计算机系统800的内部安装的图。在图8b中,除了光盘驱动器805与磁盘驱动器806,计算机801配备有一或多个处理器,例如微处理单元(mpu)811;只读记忆体(rom)812,其中储存有例如开机程序的程序;连接微处理单元811的随机存取记忆体(ram)813,其中短暂储存了应用程序的指令并且提供暂存区;硬盘814,其中储存了应用程序、系统程序、和数据;以及连接微处理单元811、只读记忆体812、及相似者的总线815。应当注意的是计算机801可包含提供连接至区域网络(lan)的网络卡(未绘示)。
126.使计算机系统800执行先前实施方式中用于检验罩幕盒上微粒的功能的程序可储存于光盘821或磁盘822中,并传输到硬盘814,光盘821或磁盘822插入光盘驱动器805或磁盘驱动器806。代替地,此程序可经由网络(未绘示)传送至计算机801并储存于硬盘814内。执行期间,将程序载入随机存取记忆体813。程序可自光盘821、或磁盘822、或直接自网络载入。程序不必非得包含,例如作业系统(os)或第三方程序来使计算机801执行先前实施方式中用于检验罩幕盒上的微粒的功能。此程序可仅包含指令部分以在受控模式中呼叫适合的功能(模块),并获得所需的结果。
127.依照本揭露的一些实施方式,检验罩幕盒外表面的方法包含将空气流导引在罩幕盒的外表面上的多个位置中的第一位置,并利用导引的空气流从罩幕盒的外表面上的第一位置移除一或多个微粒。此方法亦包含从罩幕盒的外表面上的第一位置抽取散射空气,并确定从第一位置抽取的散射空气内的微粒的数量为第一位置处的微粒采样数。此方法还包含移动罩幕盒并将空气流导引到罩幕盒的外表面上的多个位置中的其他位置,以确定在其他位置抽取的散射空气中的微粒的采样数。此方法亦包含依照在多个位置所确定的微粒采样数,产生罩幕盒的外表面上的微粒图,以使得对于多个位置中的每一个位置而言,在抽取的散射空气中的微粒采样数与在这位置处罩幕盒的外表面上的微粒数成正比。在一些实施方式中,罩幕盒在x方向与y方向上移动,且多个位置沿x方向与y方向分布在罩幕盒的外表面上。在一些实施方式中,此方法还包含通过管子从空气槽输送空气流,并将空气流从设于管子的一端的喷嘴导引至罩幕盒的外表面。在一些实施方式中,此方法还包含调整喷嘴与罩幕盒的外表面之间的距离,并对于多个位置的每一个,喷嘴与罩幕盒的外表面之间保持
相同的距离。在一些实施方式中,对于多个位置的每一个,将空气流以第一入射角导引至罩幕盒的外表面。在一些实施方式中,此方法还包含调整来自喷嘴的空气流的流率,并调整第一入射角,且将第一入射角在相对于罩幕盒的表面的垂直平面介于65度至25度之间调整。在一些实施方式中,罩幕盒的外表面在喷嘴之上,向上导引空气流,并且来自罩幕盒的表面的散射气体向下流动,或者罩幕盒的外表面在喷嘴之下,向下导引空气流,且来自罩幕盒的表面的散射气体向上流动。
128.依照本揭露的一些实施方式,检验罩幕盒微粒的方法包含将气流导引到罩幕盒的外表面上的多个位置,且通过所导引的气流从罩幕盒的外表面上的多个位置中的每一个移除一或多个微粒。此方法亦包含在多个位置从罩幕盒的外表面采样散射气体,以确定来自多个位置的散射气体中的第一微粒数。对于多个位置中的每一个位置,散射气体中的第一微粒数与在那位置处的罩幕盒的外表面上的微粒数成正比。在一些实施方式中,此方法还包含依照在多个位置所确定的第一微粒数确定罩幕盒上的微粒图。在一些实施方式中,气流是清洁干燥空气流。在一些实施方式中,导引空气流之前,此方法包含接受双重罩幕盒内的光罩,开启双重罩幕盒的外盒,且移除双重罩幕盒的内盒作为罩幕盒,且光罩位于内盒内。在一些实施方式中,此方法还包含当多个位置的在一或多个位置上,罩幕盒的外表面上的微粒数高于临界微粒数时,清洁罩幕盒。在一些实施方式中,此方法还包含将气流从喷嘴导引至罩幕盒的外表面。在一些实施方式中,此方法还包含调整喷嘴与罩幕盒的外表面之间的距离,并对于多个位置的每一个,喷嘴与罩幕盒的外表面之间保持相同的距离。
129.依照本揭露的一些实施方式,检验罩幕盒微粒的系统包含气体源、罩幕盒、电路、以及具有连接至第一管子的第一端的喷嘴的第一管子。此系统亦包含连接于气体源与第一管子的第二端之间的气体流控制器,且将气体源经由第一管子所供应的气流导出喷嘴。此系统还包含支承罩幕盒,且在喷嘴上方于两个垂直水平方向上移动罩幕盒的水平平台。气体流控制器将气流导引到罩幕盒的外表面的多个位置,以通过导引的气流从罩幕盒的外表面移除一或多个微粒。此系统包含微粒计算器耦合至第二管子的第一端。微粒计算器经由第二管子的第二端从多个位置将散射气体抽入微粒计算器,以确定从多个位置的罩幕盒的外表面移除的微粒的采样数。在一些实施方式中,此系统还包含垂直平台,以使得具有喷嘴的第一管子的第一端与第二管子的第二端安装于垂直平台的上表面上。将垂直平台上下移动以调整垂直平台的上表面与罩幕盒的外表面之间的距离。在一些实施方式中,此系统还包含耦合至水平平台与垂直平台的水平控制器,以使得平台控制器沿z方向调整垂直平台的上表面与罩幕盒的外表面之间的距离。平台控制器在x方向与y方向上移动水平平台,借以在x方向与y方向上将气流导引到罩幕盒的外表面上的多个位置。在一些实施方式中,在x方向或y方向上的多个位置的每二相邻位置之间的距离介于约1毫米至约1公分之间。在一些实施方式中,电路接收对应于多个位置的x方向和y方向数据,接收从罩幕盒的外表面的多个位置所移除的微粒的采样数,且产生从罩幕盒的外表面的移除的微粒的采样数图。此系统还包含制图系统耦合至电路,以接收来自电路的移除的微粒的样采样数图,且显示移除的微粒的采样数。在一些实施方式中,移除的微粒的采样数与罩幕盒的外表面上的微粒数成正比,且气体源为气体槽。
130.如先前的实施方式所述,在不旋转罩幕盒的情形下,即产生出罩幕盒的外表面上的微粒图,以搭配影像处理技术来取得不规则外表面的影像。
131.先前的揭露已概要说明了数个实施方式或实施例的特征,因此熟悉此技艺者可更加了解本揭露的态样。熟悉此技艺者应当理解到其可轻易地利用本揭露做为基础,来设计或修正其他制程与结构,以实现与在此介绍的实施方式或实施例相同的目的和/或达成相同的优势。熟悉此技艺者也应当理解,这样等效架构并未脱离本揭露的精神和范畴,并且熟悉此技艺者可在不脱离本揭露的精神和范畴下于此进行各类的更动、取代与修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1