一种基于时空同步的导轨直线度误差惯性测量方法
1.本发明属于运动测量领域,更为具体地讲,尤其涉及一种导轨直线度误差测量方法。
背景技术:
2.精度作为数控机床最为重要的性能指标,探索高精度的加工制造技术一直都是制造类企业永恒追求的目标,但是相比于国外高端机床产品,约50%国产机床在精度保持性方面仍存在着一定差距。精度退化会严重限制所加工产品的精度与品质,降低关重零件的服役可靠性。为得到数控机床的实时精度,需长效监测机床误差并及时补偿,以延长机床使用寿命。因此,研究一种方便快捷的高精度数控机床多自由度误差在线测量方法变得尤为重要。
3.目前,常用的机床直线度误差测量方法有光学直接测量方法和样件间接测量方法。光学直接测量方法中应用最为普遍的为激光干涉仪,其利用激光干涉原理并配合相应棱镜实现机床直线度误差测量。光学直接测量方法具有测量精度高、抗噪声干扰能力强等优势,但是,由于光路调节复杂、采样率低、灵活性差,并且难以应用于大行程机床误差测量;而且由于采样率低,难以利用误差细节特征进行磨损规律的早期判断。基于样件间接测量方法,仅需标准试件即可完成机床直线度误差测量,具有测量成本低、方法简单、应用灵活的优势,但由于各运动轴的误差与其他多类型误差源会产生耦合影响,导致该方法主要用于机床的精度检验。目前这两种方法主要应用于离线测量场景,难以实现在线实时监测。惯性传感器测量具有高效、灵活与低成本等优势,随着惯性传感器的应用越来越广泛,其测量领域扩展到为微米级精度误差测量领域,故可通过惯性测量方法实现机床直线度误差的测量。但是仅使用惯性传感器会由于实际多次测量的相位延迟以及积分趋势项误差,造成解算直线度误差不确定度增大,且无法实现误差溯源,因此利用电涡流位移传感器的方法,通过标志脉冲信号实现惯性传感器信号同步采集,在提高惯性测量精度的同时降低了测量系统复杂度与成本,且提高了灵活性。
4.因此,针对当前的机床导轨直线度误差测量方法存在测量系统复杂、局限性大、成本高、采样率低,且难以实现在线实时测量的不足,本发明提出一种高效、准确、灵活的低成本电涡流位移传感器测量方法。基于标志脉冲信号触发,实现惯性传感器时空一致性直线度误差测量,有利于机床误差溯源,且是实现多自由度误差测量的基础。
技术实现要素:
5.针对当前的机床直线度误差测量方法存在测量系统复杂、局限性大、成本高、采样率低,且难以实现在线实时测量的不足,本发明提出一种高效、准确、灵活的低成本直线度误差测量方法,包括:
6.机床导轨直线度误差加速度信号的采集:超低频加速度计的数据采集卡采集1000-2000hz采样率的直线导轨的直线度误差加速度信号,以保证直线度误差能够被准确
地测量;
7.标志脉冲信号的触发与采集:利用电涡流位移传感器通过内部电路可在允许物理接触的区域中导通或断开电路的原理,设置其作为加速度计和数据采集卡的同步脉冲触发器,通过触发电涡流位移传感器产生标志脉冲信号,设置采集卡脉冲触发,实现脉冲信号与加速度计采集信号时域对应,最终实现直线度误差信号与加速度计采集信号时空一致;
8.导轨位置处倾角误差影响消除:基于正弦叠加法建立导轨直线度误差模型与导轨倾角误差模型,采样多速测量方案,通过加速度信号积分计算得到带有倾角误差的速度值,消除与导轨位置相关的倾角引入的测量误差,进而得到只由直线度误差引起的加速度;
9.加速度积分趋势项误差消除:利用控制点约束调控方法,使用电涡流位移传感器获取导轨首尾及中部多点直线度误差初始值,将积分趋势项数据采用坐标变换的方法进行旋转修正,消除积分趋势项误差;
10.导轨直线度误差解算:为充分利用加速度计最佳频响区域,基于多速测量方案,高速测量误差低频项、中速测量误差中频项、低速测量误差高频项,相邻测速对应机床误差空间频率数据在空间波段上连续,将分频解算信号融合后得到机床直线度误差。
11.一种基于时空同步的导轨直线度误差惯性测量方法,所述测量方法包括以下步骤,
12.s1:超低频加速度计紧固于导轨动平台上,超低频加速度计的数据采集卡采集1000-2000hz采样率的直线导轨的直线度误差加速度信号;
13.s2:基于步骤s1成功安装超低频加速度计,设置电涡流位移传感器作为超低频加速度计和其数据采集卡的同步脉冲触发器,通过触发器触发电涡流位移传感器产生标志脉冲信号,设置数据采集卡脉冲触发,实现脉冲信号与超低频加速度计采集信号时域对应,最终实现导轨的直线度误差信号与超低频加速度计采集信号时空一致;
14.s3:基于步骤s2实现同步采集,利用正弦叠加法建立导轨直线度误差模型与导轨倾角误差模型,采样多速测量方案,通过加速度信号积分计算得到带有倾角误差的速度值,消除与导轨位置相关的倾角引入的测量误差,进而得到只由直线度误差引起的加速度;
15.s4:基于步骤s3获得的直线度误差加速度值进行二次积分,使用电涡流位移传感器获取机床首尾及中部多点直线度误差初始值,利用控制点约束调控方法,将积分趋势项数据采用坐标变换的方法进行旋转修正,消除积分趋势项误差;
16.s5:基于步骤s3、s4确定超低频加速度计的解算算法,设置导轨动平台高速运动,超低频加速度计测量其误差低频项、中速测量误差中频项、低速测量误差高频项,相邻测速对应机床误差空间频率数据在空间波段上连续,将分频解算信号融合后得到机床直线度误差。
17.所述导轨相关位置处倾角误差消除,具体包括:
18.(1)建立直线度误差模型与导轨倾角误差模型
[0019][0020]
式中:e(x)表示导轨在位置x处的直线度误差;ai表示导轨误差幅值;fi表示导轨直
线度误差空间频率;表示导轨初始相位角。θ(x)表示导轨在位置x处的倾角误差;bj表示导轨倾角误差幅值;fj表示导轨倾角空间频率;表示导轨初始相位角;i表示导轨直线度正弦信号个数;j表示导轨倾角误差正弦信号个数。
[0021]
(2)导轨倾角误差影响消除
[0022]
实际测量带有倾角影响的加速度计实际采集信号如下:
[0023][0024]
式中:a(t)表示实际测量中加速度计采集信号;v表示导轨动平台运动速度;t表示导轨动平台一次运动的时间;θ(x)表示导轨在位置x处的倾角误差将测量加速度数据积分到速度,利用导轨位置与速度的关系x=vt,得到与位置x相关的速度信号为:
[0025][0026][0027]
式中:ve(x)为与位置x相关的直线度误差速度信号;v
θ
(x)为与位置x相关的导轨倾角引入的积分误差信号;c为由于初值未知引起的积分趋势项误差。
[0028]
由式(3)与式(4)可知积分后直线度误差测量速度信号为v(x)=ve(x)+v
θ
(x),在采用多速测量方案下,通过式(5)可消除与导轨位置相关的倾角引入的测量误差。
[0029][0030]
式中:vk为测量速度;ak(x)为消除倾角影响后的直线度误差测量加速度信号。
[0031]
3、根据权利要求1所述的一种基于时空同步的平面运动位移及轨迹测量方法,其特征在于:
[0032]
所述多速测量方案中滤波算法为频域滤波,相应测量速度对应下的截止频率f
cd
和f
cu
:
[0033][0034]
式中:vk分别代表高中低三种测量速度;f
cu
、f
cd
分别为滤波上下截止频率;fi代表误差空间频率,其中i=0,1,2。
[0035]
基于时空同步的平面运动位移及轨迹测量装置,该装置包括:长冲程直线导轨(1)、工作台面(2)、加速度计(3)、采集卡(4)、数据处理与显示单元(5)、电涡流位移传感器(6)、标志脉冲信号(7)、误差加速度信号(8)、信号传输设备(9)。
[0036]
长冲程直线导轨(1)的工作台面(2)提供多速直线运动;超低频加速度计(3)紧固于工作台面,二者具有一致的运动位移;电涡流位移传感器(6)作为标志脉冲信号源,实现加速度积分多点调控;设置标志脉冲信号(7)作为采集卡(4)触发源,触发采集卡(4)同步采集误差加速度信号(8);信号传输设备(7)传输时空一致采集的直线度误差加速度信号;处理与显示单元(5)处理采集的误差加速度信号,保存与显示导轨直线度误差测量结果。
[0037]
本发明平面运动位移及轨迹测量方法具有如下优势:
[0038]
⑴
本发明方法稳定、可靠、实用,可与光学测量相比能够同时适用于不同误差空间波长的机床直线度误差测量。
[0039]
⑵
本发明方法测量过程简单、灵活、高效、系统成本低,与光路复杂、对光耗时的光学测量方法相比,对于不同误差空间频率的直线度误差测量只需一个加速度计。
[0040]
⑶
本发明方法通过多速测量融合方案实现垂直于运动主轴向上高精度的机床直线度误差测量。
[0041]
⑷
本发明方法属于平面运动测量方法,利用超低频加速度计能够实现一定频率范围内的高精度机床直线度误差测量。
[0042]
⑸
本发明方法将电涡流位移传感器与加速度计数据融合,实现时空一致与多点调控,有利于机床直线误差溯源,同时为机床多自由度误差在线实时监测提供一种行之有效的途径。
附图说明
[0043]
附图1为本发明方法具体实施实例装置示意图;
[0044]
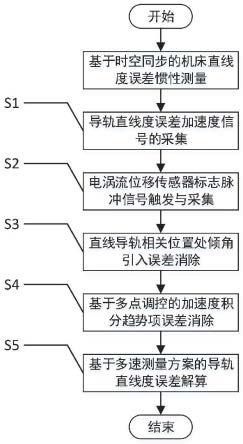
附图2为一种基于时空同步的导轨直线度误差惯性测量流程图;
[0045]
附图3、4为本发明方法具体实施实例导轨直线度误差测量结果图。
具体实施方式
[0046]
当前的机床直线度误差测量方法存在测量系统复杂、局限性大、成本高、采样率低,且难以实现在线实时测量的不足,本发明提出一种高效、准确、灵活的低成本直线度误差测量方法。本发明方法通过利用电涡流位移传感器与加速度计实现了机床全频段直线度误差时空一致性惯性测量,下面结合附图和具体的实施实例对本发明做出详细描述。
[0047]
参考图1为本发明方法的实时实例装置示意图,该装置主要包括:长冲程直线导轨(1)、工作台面(2)、加速度计(3)、采集卡(4)、数据处理与显示单元(5)、电涡流位移传感器(6)、标志脉冲信号(7)、误差加速度信号(8)、信号传输设备(9)。其特征在于:长冲程直线导轨(1)的工作台面(2)提供多速直线运动;超低频加速度计(3)紧固于工作台面,二者具有一致的运动位移;电涡流位移传感器(6)作为标志脉冲信号源,实现加速度积分多点调控;设置标志脉冲信号(7)作为采集卡(4)触发源,触发采集卡(4)同步采集误差加速度信号(8);信号传输设备(7)传输时空一致采集的直线度误差加速度信号;处理与显示单元(5)处理采集的误差加速度信号,保存与显示导轨直线度误差测量结果。
[0048]
参考图2为一种基于时空同步的机床直线度误差惯性测量流程图。本发明测量方法主要包括以下步骤:
[0049]
步骤s1:超低频加速度计的数据采集卡采集1000-2000hz采样率的直线导轨的直线度误差加速度信号;
[0050]
步骤s2:标志脉冲信号的触发与采集,其包括:设置限位传感器作为加速度计和数据采集卡的同步脉冲触发器,通过触发限位传感器产生标志脉冲信号,设置采集卡脉冲触发,实现脉冲信号与加速度计采集信号时域对应,最终实现直线度误差信号与加速度计采集信号时空一致;
[0051]
步骤s3:导轨位置处倾角误差影响消除,其包括:基于正弦叠加法建立导轨直线度误差模型与导轨倾角误差模型,采样多速测量方案,通过加速度信号积分计算得到带有倾角误差的速度值,消除与导轨位置相关的倾角引入的测量误差,进而得到只由直线度误差引起的加速度;
[0052]
步骤s4:加速度积分趋势项误差消除,其包括:使用电涡流位移传感器获取机床首尾及中部多点直线度误差初始值,利用控制点约束调控方法,将积分趋势项数据采用坐标变换的方法进行旋转修正,消除积分趋势项误差;
[0053]
步骤s5:机床导轨直线度误差解算:基于多速测量方案,高速测量误差低频项、中速测量误差中频项、低速测量误差高频项,相邻测速对应机床误差空间频率数据在空间波段上连续,将分频解算信号融合后得到机床直线度误差。
[0054]
本实施实例装置的具体参数为:单轨直线电机振动台(5m)为紧固于工作台面的加速度计分别提供低中高三段运动速度,并至少提供1m的匀速行程;使用超低频加速度计;电涡流位移传感器(prwl18-dn-v)紧固于振动台直线导轨一侧,用于实现时空一致测量与积分趋势项多点调控;选择采样率4khz、32位精度传感器信号采集卡(inv3062)。
[0055]
为验证本发明基于时空同步的机床直线度误差惯性测量方法的精度,利用本发明方法实现了0~550mm长度范围内的导轨直线度误差惯性测量。参考图3-4为导轨直线度误差惯性测量结果。参考图3所示的测量结果为电涡流位移传感器多点调控积分趋势结果;参考图4所示的测量结果为与激光跟踪仪时空一致惯性测量结果,与激光干涉仪测量误差rms为2.64μm。
[0056]
上述描述为本发明实施实例的详细介绍,其并非用于对本发明作任何形式上的限定。本领域相关技术人员可在本发明的基础上可做出一系列的优化、改进及修改等。因此,本发明的保护范围应由所附权利要求来限定。
[0057]
本发明平面运动位移及轨迹测量方法具有如下优势:
[0058]
⑴
本发明方法稳定、可靠、实用,可与光学测量相比能够同时适用于不同误差空间波长的机床直线度误差测量。
[0059]
⑵
本发明方法测量过程简单、灵活、高效、系统成本低,与光路复杂、对光耗时的光学测量方法相比,对于不同误差空间频率的直线度误差测量只需一个加速度计。
[0060]
⑶
本发明方法通过多速测量融合方案实现垂直于运动主轴向上高精度的机床直线度误差测量。
[0061]
⑷
本发明方法属于平面运动测量方法,利用超低频加速度计能够实现一定频率范围内的高精度机床直线度误差测量。
[0062]
⑸
本发明方法将电涡流位移传感器与加速度计数据融合,实现时空一致与多点调控,有利于机床直线误差溯源,同时为机床多自由度误差在线实时监测提供一种行之有效的途径。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1