车辆定位修正方法、装置、存储介质及电子设备与流程
本技术涉及智能驾驶,尤其涉及一种车辆定位修正方法、装置、存储介质及电子设备。
背景技术:
1、随着人们生活水平的提高以及运输行业的发展,车辆成为一种重要的交通工具。各种各样的车辆如家用车、运输车等车辆在生产生活中得到了广泛的应用。
2、在车辆的使用过程中,需要对车辆进行定位。
技术实现思路
1、本技术实施例提供一种车辆定位修正方法、装置、存储介质及电子设备,能够对车辆进行定位。
2、第一方面,本技术实施例提供一种车辆定位修正方法,包括:
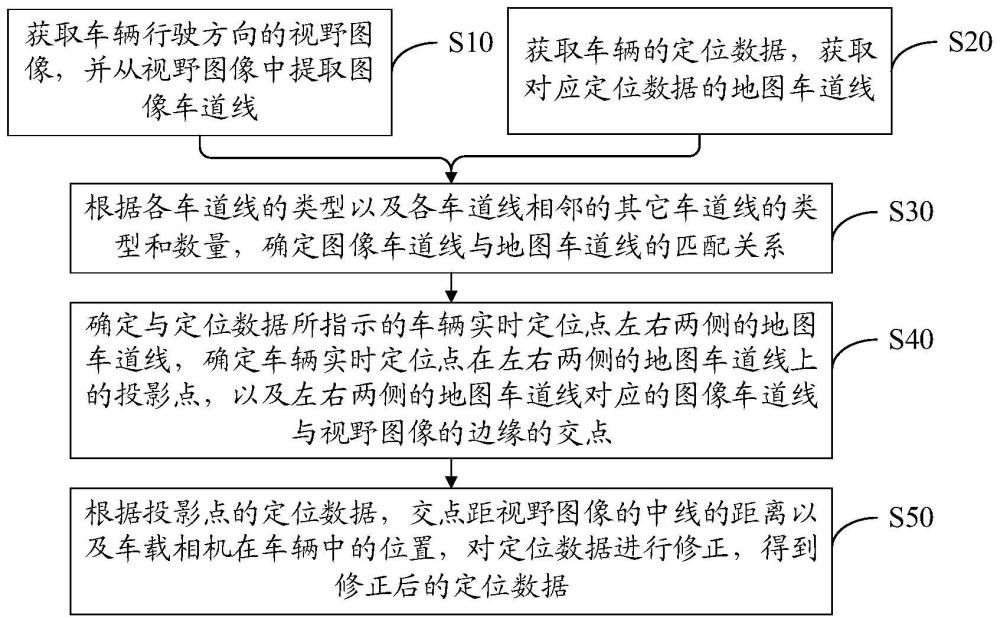
3、获取车辆行驶方向的视野图像,并从视野图像中提取图像车道线;
4、获取车辆的定位数据,获取对应定位数据的地图车道线;
5、根据各车道线的类型以及各车道线相邻的其它车道线的类型和数量,确定图像车道线与地图车道线的匹配关系;
6、确定定位数据所指示的车辆实时定位点左右两侧的地图车道线,确定车辆实时定位点在左右两侧的地图车道线上的投影点,以及左右两侧的地图车道线对应的图像车道线与视野图像的边缘的交点;
7、根据投影点的定位数据,交点距视野图像的中线的距离以及车载相机在车辆中的位置,对定位数据进行修正,得到修正后的定位数据。
8、第二方面,本技术实施例提供了一种车辆定位修正装置,包括:
9、第一获取模块,用于获取车辆行驶方向的视野图像,并从视野图像中提取图像车道线;
10、第二获取模块,用于获取车辆的定位数据,获取对应定位数据的地图车道线;
11、第一确定模块,用于根据各车道线的类型以及各车道线相邻的其它车道线的类型和数量,确定图像车道线与地图车道线的匹配关系;
12、第二确定模块,用于确定定位数据所指示的车辆实时定位点左右两侧的地图车道线,确定车辆实时定位点在左右两侧的地图车道线上的投影点,以及左右两侧的地图车道线对应的图像车道线与视野图像的边缘的交点;
13、修正模块,用于根据投影点的定位数据,交点距视野图像的中线的距离以及车载相机在车辆中的位置,对定位数据进行修正,得到修正后的定位数据。
14、在本技术一种可能的实现方式中,匹配关系包括目标匹配关系,在根据各车道线的类型以及各车道线相邻的其它车道线的类型和数量,确定图像车道线与地图车道线的匹配关系时,第一确定模块具体还用于:
15、根据各车道线的类型以及各车道线相邻的其它车道线的类型和数量,采用同一套编码规则对图像车道线和地图车道线进行数字编码,得到图像车道线和地图车道线的数字编码结果;
16、根据图像车道线和地图车道线的数字编码结果,确定图像车道线与地图车道线的候选匹配关系;
17、若候选匹配关系唯一,则将候选匹配关系确定为目标匹配关系;
18、否则,从候选匹配关系中确定出目标匹配关系。
19、在本技术一种可能的实现方式中,在从候选匹配关系中确定出目标匹配关系时,第一确定模块具体还用于:
20、确定视野图像中存在遮挡导致图像车道线识别不完整;
21、对图像车道线的识别不完整进行提示,并从候选匹配关系中确定出目标匹配关系。
22、在本技术一种可能的实现方式中,数字编码结果中包括车道线的类型以及多项编码元素的组合,车道线的类型包括实线和虚线,编码元素包括车道线左侧的虚线车道线的数量、车道线左侧的实线车道线的数量、车道线右侧的虚线车道线的数量、车道线右侧的实线车道线的数量,在根据图像车道线和地图车道线的数字编码结果,确定图像车道线与地图车道线的候选匹配关系时,第一确定模块具体还用于:
23、当图像车道线与地图车道线的类型一致且图像车道线的数字编码结果中各项编码元素的数值均不超过地图车道线的数字编码结果中对应编码元素的数值时,确定图像车道线与地图车道线存在候选匹配关系。
24、在本技术一种可能的实现方式中,在获取车辆行驶方向的视野图像时,第一获取模块具体还用于:
25、在到达当前定位修正周期时,获取车辆行驶方向的视野图像;
26、在从候选匹配关系中确定出目标匹配关系时,第一确定模块具体还用于:
27、获取车辆在前一定位修正周期内修正后的历史定位数据;
28、根据历史定位数据确定车辆的历史车道;
29、若检测出车辆在当前定位修正周期内发生过车道变换,则获取车辆的车道变换信息,并根据历史车道与车道变换信息确定出车辆的当前车道,否则将历史车道确定为车辆的当前车道;
30、根据车辆的当前车道从候选匹配关系中确定出目标匹配关系。
31、在本技术一种可能的实现方式中,在确定定位数据所指示的车辆实时定位点左右两侧的地图车道线,确定车辆实时定位点在左右两侧的地图车道线上的投影点,以及左右两侧的地图车道线对应的图像车道线与视野图像的边缘的交点时,第二确定模块具体还用于:
32、将位于定位数据所指示的车辆实时定位点左侧且与车辆实时定位点相邻的地图车道线确定为第一地图车道线,将位于定位数据所指示的车辆实时定位点右侧且与车辆实时定位点相邻的地图车道线确定为第二地图车道线;
33、确定车辆实时定位点在第一地图车道线上的第一投影点以及在第二地图车道线上的第二投影点;
34、确定第一地图车道线匹配的第一图像车道线以及第二地图车道线匹配的第二图像车道线;
35、确定第一图像车道线与视野图像的边缘的第一交点以及第二图像车道线与视野图像的边缘的第二交点。
36、在本技术一种可能的实现方式中,定位数据包括经纬度坐标,在根据投影点的定位数据,交点距视野图像的中线的距离以及车载相机在车辆中的位置,对定位数据进行修正,得到修正后的定位数据时,修正模块具体还用于:
37、获取第一投影点的经纬度坐标和第二投影点的经纬度坐标;
38、获取第一交点距视野图像的中线的第一距离,第二交点距视野图像的中线的第二距离,以及第一交点与第二交点的第三距离;
39、当车载相机位于面向车辆行驶方向的正中位置时,获取第一距离与第二距离的第一比值,以及获取第二距离与第三距离的第二比值;
40、获取第二投影点的经纬度坐标与第一比值的乘积;
41、将第一投影点的经纬度坐标与乘积的差值乘以第二比值,得到修正后的经纬度坐标。
42、第三方面,本技术实施例还提供一种计算机可读的存储介质,存储介质上存储有计算机程序,计算机程序被处理器执行以实现本技术实施例提供的任一种车辆定位修正方法中的步骤。
43、第四方面,本技术实施例还提供一种电子设备,电子设备包括处理器和存储器,存储器中存储有计算机程序,处理器执行计算机程序以实现本技术实施例提供的任一种车辆定位修正方法中的步骤。
44、本技术实施例中,首先获取车辆行驶方向的视野图像,并从视野图像中提取图像车道线;获取车辆的定位数据,获取对应定位数据的地图车道线;然后根据各车道线的类型以及各车道线相邻的其它车道线的类型和数量,确定图像车道线与地图车道线的匹配关系;进而确定定位数据所指示的车辆实时定位点左右两侧的地图车道线,确定车辆实时定位点在左右两侧的地图车道线上的投影点,以及左右两侧的地图车道线对应的图像车道线与视野图像的边缘的交点;最后根据投影点的定位数据,交点距视野图像的中线的距离以及车载相机在车辆中的位置,对定位数据进行修正,得到修正后的定位数据。本技术实施例结合车道线自身与其相邻车道线的特性将视野图像中的车道线和地图中的车辆定位匹配起来,基于该匹配关系修正车辆原本的定位数据,能够实现对车辆的定位。
- 还没有人留言评论。精彩留言会获得点赞!