一种模拟横向失稳信号的装置和方法与流程
1.本发明属于轨道交通模拟实验技术领域,尤其涉及一种模拟横向失稳信号的装置和方法。
背景技术:
2.轨道车辆的横向稳定性是评价车辆服役安全的重要评估指标。对于横向失稳的判定,在不同的标准中有不同的指标,可参见下表。
[0003][0004]
检测技术精准度问题除了理论的演算,仍需要实验的验证。目前在实验验证方面,由于实际车辆横向失稳的因素和状态是非常复杂的,难以完全复原,大多数厂家仅根据国标判定标准采用仿真信号来模拟,缺少真实物理信号的辅助。
技术实现要素:
[0005]
针对上述问题,本发明第一方面提出一种模拟横向失稳信号的装置,包括:底座,底座上固定有横向轨道;旋转机构,包括转轴和以转轴为中心旋转的旋转终端,转轴固定于底座;横向机构,包括连接部、传感器,连接部连接旋转终端和传感器,传感器在连接部的带动下,随着旋转终端的旋转在横向轨道上横向往复运动。
[0006]
该装置设计了简单有效的机械运动结构,以旋转运动带动传感器进行横向往复运动,通过简单调整旋转运动参数即可对应地改变传感器的横向加速度,从而科学地模拟了列车横向加速度产生的信号。
[0007]
优选地,底座上固定有步进电机,转轴包括联轴器,步进电机通过联轴器的传动带动转轴和旋转终端旋转。
[0008]
优选地,传感器固定于轴承板,连接部包括连杆,连杆两端设置关节轴承分别用于连接旋转终端和轴承板。
[0009]
优选地,旋转机构还包括跟随转轴转动的电缸,电缸通过单片机程序控制旋转终端与转轴的距离。进一步地,转轴上安装有导电滑环,电缸通过导电滑环供电,导电滑环的内环与转轴固定;底座上安装有止转杆或螺钉,导电滑环的外环通过止转杆或螺钉与底座保持相对固定。
[0010]
优选地,传感器采集加速度信号,通过逐渐增加连接部长度的过程模拟横向失稳发生过程。
[0011]
本发明第二方面提出一种模拟横向失稳信号的方法,该方法应用上述任一装置实现,具体过程包括:转轴带动旋转终端旋转运动;旋转终端通过连接部带动传感器在横向轨道上横向往复运动,传感器采集运动的加速度数据;逐渐增大旋转运动的旋转角度和/或连
接部的长度,从而带动传感器的横向位移逐渐增大,模拟横向失稳发生。
[0012]
优选地,通过电机驱动转轴旋转;通过电缸连接转轴和旋转终端并调整转轴和旋转终端的距离。
[0013]
优选地,传感器的加速度表达式为
[0014][0015]
其中,v为传感器运动速度,θ为传感器的转动角度,r为旋转半径,l为连接部长度。
[0016]
本技术提出的模拟横向失稳信号的装置和方法,基于简单的机械运动结构设计,较完整体现列车横向失稳的横向变加速度以及横向位移发散过程,反映了列车横向失稳的特征。该方案可以通过调整旋转半径、驱动转速,获取数据设定阀值等参数,进而辅助后续的检测算法设计。
附图说明
[0017]
附图帮助进一步理解本技术。为了便于描述,附图中仅示出了与有关发明相关的部分。
[0018]
图1为一个列车横向失稳过程的构架位移示意图;
[0019]
图2为一实施例中简化列车横向振动的算法模型示意图;
[0020]
图3为一实施例中简化的列车横向振动的算法模型中传感器在一个运动周期内的位移、速度、加速度曲线图;
[0021]
图4为一实施例中横向失稳试验台的整体结构示意图;
[0022]
图5为一实施例中试验台底座结构示意图;
[0023]
图6为一实施例中试验台旋转机构结构示意图;
[0024]
图7为一实施例中试验台横向机构的结构示意图。
具体实施方式
[0025]
以下首先描述本发明的理论支持。
[0026]
图1为本技术一实施例中简化列车横向振动的算法模型示意图。记op的长度为r,pq的长度为l,qr的长度为s。当op以角速度ω旋转时,由pq带动qr,同时qr带动传感器sensor在水平线上作往复直线运动。假设初始时刻op的端点p位于水平线段oq上,op从初始位置起转动的角度为θ。取o点为坐标原点,or方向为x轴正方向,sensor在x轴上的坐标为x,那么可用x表示sensor的位移
[0027][0028]
对位移求导得到速度v的表达式
[0029][0030]
对速度v求导得到加速度a的表达式
[0031][0032]
在一具体实施例中,取l=0.2m,r=0.08m,s=0.05m,ω=6hz,得到一个旋转周期的位移、速度、加速度的图形,如图2所示。从图中可以看出,当θ=0时,位移有最大值x
max
,速度为v=0,加速度为最小值a
min
;当θ=π时,位移有最小值x
min
,速度v=0,加速度为最大值a
max
;即位移和加速度的绝对值同时达到最大值。
[0033]
在列车超速出现横向失稳时,悬挂系统不足以消耗掉由牵引力带来的横向运动能量,此时所表现出的振动特性为横向位移振幅呈现发散扩大的迹象,如图3所示。该过程,可以通过逐渐增大模型中的半径r或pq的长度l来表示。
[0034]
下面结合附图和实施例对本技术作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅用于解释相关发明,而非对该发明的限定。
[0035]
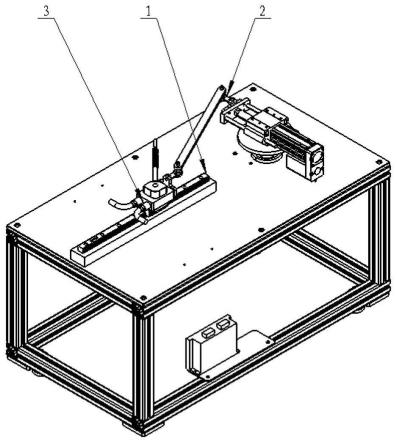
图4为本技术一实施例中横向失稳试验台的整体结构示意图,其中包括底座1,底座上固定有横向轨道;旋转机构2,包括转轴和以转轴为中心旋转的旋转终端,转轴固定于底座;横向机构3,包括连接部、传感器,连接部连接旋转终端和传感器,传感器在连接部的带动下,随着旋转终端的旋转在横向轨道上横向往复运动。
[0036]
图5为本技术一实施例中底座的结构示意图,其中的主要组件包括底座框11,构成底座的框架结构并用于固定电机等构件。底座框11可以采用铝型材。底部设计有地脚座12,用于固定底座框11。在底座台面的适当位置,设置有横向轨道13,供横向机构做横向往复运动;带座轴承14,用于固定旋转机构。
[0037]
图6为本技术一实施例中旋转机构的结构示意图,其中包括转轴21,转盘22,旋转关节轴承板23,电缸24,导电滑环25,双膜片联轴器26,旋转关节轴承27。采用步进电机,通过双膜片联轴器26的传动带动转轴21和转盘22旋转。步进电机中设计有驱动电路,控制电机转向和转速。电缸24一端固定于转盘22并和转盘22同步转动。通过导电滑环25为电缸24供电,并设计单片机程序控制其位移及周期规律,使电缸24可根据需要调整旋转关节轴承27距转轴21的水平距离,即调整旋转关节轴承27的旋转半径大小。导电滑环25的内环与转轴21保持固定,外环则通过固定于底座的止转杆或螺钉固定。
[0038]
图7为本技术一实施例中横向机构的结构示意图,其中包括连杆31,横向关节轴承板32,滑块座33,横向关节轴承34,滑轨滑块35,三轴复合传感器36。通过连杆31的传动,旋转机构的转动带动滑块座33,滑轨滑块35,三轴复合传感器36在横向轨道上进行横向往复运动,三轴复合传感器36采集相关运动数据至诊断仪进行分析。
[0039]
在另一实施例中,上述试验台用于模拟横向失稳信号的产生,具体方法是,转轴带动旋转终端旋转运动;旋转终端通过连接部带动传感器在横向轨道上横向往复运动,传感器采集运动的加速度数据;逐渐增大旋转运动的旋转角度和/或连接部的长度,从而带动传感器的横向位移逐渐增大,模拟横向失稳发生。
[0040]
上述实施例中所描述的方案,采用直观的机械结构展示了列车横向失稳的产生,模拟并给出列车横向失稳信号,为后续失稳判定等工作提供了数据支持。
[0041]
尽管结合优选实施方案具体展示和介绍了本技术的内容,但所属领域的技术人员应该明白,在不脱离所附权利要求书所限定的本技术的精神和范围内,没有做出创造性劳
动的情况下,在形式上和细节上对本技术做出的各种变化,均为本技术的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1