一种微机电陀螺非线性偏置在线估计方法
1.本发明涉及组合导航领域、信息技术领域和自动控制领域的综合应用,尤其涉及一种利用组合导航系统姿态信息,在线估计微机电陀螺非线性偏置的方法。
背景技术:
2.基于微机电系统技术(micro electro-mechanical systems-mems)的惯性元件(陀螺和加速度计)与外界辅助信息(如卫星导航信息、视觉信息等)构成微机电组合导航系统(mems-based integrated navigation system),广泛应用于各类运动体(如车辆、行人、机器人、无人机、飞艇等)的姿态和位置测量之中。随着mems技术的快速发展,已出现了导航级mems惯性元件。然而在低成本应用场合中,工业级微机电组合导航系统精度仍受制于mems陀螺测量值中的偏置误差。mems陀螺偏置误差中的随机性误差包含较大的逐次启动偏置和环境耦合误差。当外界辅助信息失效时,这些随机性误差将导致mems组合导航系统精度快速下降。因此,在线校正mems陀螺偏置,成为提高低成本应用场合中mems组合导航系统可靠性和实用性的关键。
3.多传感器信息融合方法是目前广泛应用的mems陀螺偏置在线校正方法之一。该方法中假设已知mems陀螺偏置的线性动态模型及其噪声特性,采用非线性卡尔曼滤波等随机状态滤波方法,利用外界辅助信息实现偏置的在线估计和校正,在很多研究中已经取得了不小的成果。有研究针对姿态初始对准误差、加速度和磁场传感器测量值的不确定性,提出了基于协方差膨胀-乘法扩展卡尔曼滤波器的姿态和陀螺偏置估计器。有研究提出了一种基于两步测量更新卡尔曼滤波策略的鲁棒姿态和陀螺偏置估计器。此外,还有研究针对火星星表约束环境下火星无人机振动耦合的微惯性陀螺随机性偏置,提出一种微惯性/视觉组合导航算法。在火星星表为平面的假设条件下,提取视觉图像中的无人机姿态测量信息,基于扩张卡尔曼滤波实现姿态和陀螺偏置估计。然而,组合滤波方法受运动体动力学特性和任务轨迹的限制,难以始终保证mems陀螺偏置的可观性。与此同时,当mems陀螺偏置的线性模型和量测噪声特性不准确时,很难获得令人满意的在线校正结果。
4.近年来,针对量测噪声特性不准确,抗干扰能力差等问题,非线性观测器被引入到mems陀螺偏置在线校正过程中,已经在诸多研究中表现出良好的性能。有人针对陀螺偏置动态线性模型参数变化和量测噪声特性不准确等问题,提出了基于运动体动力学和运动学模型的姿态滑模观测器,提高了陀螺偏置估计的鲁棒性。然而,姿态滑模观测器存在着运动体动力学模型精度要求高等问题。还有专家在全状态可观和轨迹加速度约束条件下,基于uwb和运动捕捉系统输出的距离和姿态信息,提出了一种非线性导航观测器,实现了半全局渐进稳定地估计线性陀螺逐次启动偏置。此外,还有人提出了一种半全局稳定的非线性观测器,利用视觉方位、速度等测量信息,实现了陀螺偏置和姿态的估计。在此基础上,有专家还为视觉辅助惯性导航系统开发了一种非线性观测器,该观测器保证了几乎全局渐近稳定性和局部指数稳定性。研究表明,在已知mems陀螺偏置动态线性模型、高精度观测信息、特定飞行轨迹等约束条件下,基于非线性观测器的陀螺偏置在线校正方法具有计算量小、李
雅普诺夫稳定和对不确定干扰具有鲁棒性等优势。然而,有专家指出实际应用中,环境因素耦合的mems陀螺偏置特性难以用特定线性模型描述。据我们所知,在mems陀螺偏置动态模型未知情况下,基于非线性观测器的陀螺偏置在线校正方法仍然未被讨论。
技术实现要素:
5.为了解决上述已有技术存在的不足,提高低成本组合导航系统的精度,本发明提出了一种微机电陀螺非线性偏置在线估计方法,该方法利用商用级mems惯性传感器和外部姿态传感器获取陀螺角速度和非惯性姿态测量值,提出了一种在线观测陀螺仪偏置的非线性观测器,以获取的传感器信息为输入进行带偏置校正的姿态估计和陀螺偏置估计,并应用于微惯性组合导航平台,在动态实验中测试该估计方法的性能。本发明的具体技术方案如下:
6.一种微机电陀螺非线性偏置在线估计方法,包括以下步骤:
7.s1:利用mems惯性传感器和外部姿态传感器获取陀螺角速度和非惯性姿态测量值,并对陀螺角速度测量值进行静态偏置校正、去噪及映射预处理,对非惯性姿态测量值进行映射预处理;
8.s2:构建在线观测陀螺仪偏置的非线性观测器,以步骤s1得到的传感器信息为输入进行带偏置校正的姿态估计和陀螺偏置估计。
9.进一步,所述步骤s1包括以下子步骤:
10.s1-1:搭建安装有mems惯性传感器和外部姿态传感器的微惯性组合导航平台;
11.s1-2:设计期望轨迹,完成动态实验,利用mems惯性传感器和外部姿态传感器,实时采集陀螺角速度和非惯性姿态测量值;
12.s1-3:根据运动起始的时刻,截取步骤s1-2陀螺角速度中的陀螺仪初始静止阶段输出,将该阶段陀螺仪输出的均值视为mems陀螺的初始确定性偏置,对运动阶段的陀螺角速度进行静态偏置校正;
13.s1-4:利用滑动平均滤波器去除步骤s1-3的处理结果的振动噪声;
14.s1-5:定义超复映射r=h(r),其中h:5:定义超复映射r=h(r),其中h:为三维欧几里得空间,r=[r
x r
y rz]
t
为任意三维空间向量,r=0+ir
x
+jry+krz为超复映射后的四元数,i,j,k为虚数单位;使用超复映射h将步骤s1-2的非惯性姿态λc和步骤s1-4的陀螺角速度分别映射为非惯性姿态测量四元数λc和陀螺仪测量值四元数
[0015]
进一步,所述步骤s2包括以下子步骤:
[0016]
s2-1:将运动起始的时刻作为初始时刻,根据步骤s1-2数据的最小采样时刻确定积分时刻t,其中t=1,2,
…
,其中初始0时刻姿态估计四元数λ
o0
取值等于初始0时刻非惯性测量四元数λ
c0
,初始0时刻陀螺偏置估计值满足
[0017]
s2-2:提取步骤s1-5中t时刻的非惯性姿态测量四元数λ
ct
,将(t-1)时刻的姿态估计四元数λ
o(t-1)
取逆,根据下式计算出t时刻的姿态估计反馈项e
t
:
[0018][0019]
其中,右下角标t或(t-1)代表积分时刻,为姿态估计误差四元数,为
的实数部分,为的向量部分,代表姿态估计反馈项;
[0020]
s2-3:将步骤s2-2的处理结果放大得到姿态估计修正项ke
t
,同时提取t时刻步骤s1-4中的处理结果和(t-1)时刻陀螺偏置估计值t时刻的姿态估计修正项ke
t
、t时刻的陀螺仪测量值与(t-1)时刻的陀螺偏置估计值三者共同驱动姿态估计泊松方程,如下式
[0021][0022]
从而实现带偏置校正的姿态估计,得到t时刻的姿态估计四元数λ
ot
;
[0023]
s2-4:定义映射其中h:γ为任意四元数γ=τ0+iτ1+jτ2+kτ3,为该四元数对应的列向量使用映射h将步骤s2-3的处理结果λ
ot
映射为t时刻姿态估计四元数向量λ
ot
,经过一阶非线性前馈放大环节,如下式
[0024][0025]
得到t时刻陀螺偏置乘积耦合分量的估计其中,是一阶非线性前馈放大环节t时刻的增益矩阵;
[0026]
s2-5:提取t时刻步骤s1-5中的陀螺仪测量值四元数步骤s2-4中的姿态估计四元数向量λ
ot
与陀螺偏置乘积耦合分量共同合成t时刻姿态-角速度驱动项u
t
,输入到一阶非线性反馈系统中,得到t时刻陀螺偏置积分耦合分量的估计如下式
[0027][0028]
其中,为t时刻一阶非线性反馈系统的增益矩阵,u
t
∈r4;
[0029]
s2-6:提取t时刻步骤s2-4和步骤s2-5的处理结果,陀螺偏置乘积耦合分量的估计与陀螺偏置积分耦合分量的估计相加得到t时刻陀螺偏置估计值四元数使用h和h复合后的逆映射得到t时刻陀螺偏置估计值即满足
[0030][0031]
s2-7:重复步骤s2-2至s2-6,直到完成所有时刻带偏置校正的姿态估计和陀螺偏置估计。
[0032]
本发明与现有技术相比所具有的有益效果:
[0033]
1.本发明设计了一种使用外部姿态传感器在线观测商用级mems陀螺偏置的观测器。相较于鲁棒混合观测器(robust hybrid attitude and gyro-bias observer-rho)、迭代扩展卡尔曼滤波(iterated extended kalman filter-iekf)方法对于运动体姿态和陀螺漂移线性相关的假设,本发明提出的nrbo(nonlinear robust bias observer)方法放宽了陀螺漂移的模型要求,即不再认为陀螺偏置为常值,而是认为陀螺漂移模型为运动体姿态的非线性函数。这使得nrbo方法对模型的假设更符合真实情况,适用范围更加广泛。
[0034]
2.本发明将陀螺漂移的非线性模型设计为陀螺偏置乘积耦合分量与陀螺偏置积分耦合分量两部分,通过调整前馈增益矩阵和反馈增益矩阵便可实现陀螺非线性偏置的在线估计。相较于以往的rho、iekf方法的效果,nrbo方法在准确性、鲁棒性和稳定性上都有更高的表现。
[0035]
3.本发明提出的nrbo方法可用于加速度计非线性偏置的在线估计,从而进一步提高低成本微机电组合导航系统的精度。
附图说明
[0036]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,通过参考附图会更加清楚的理解本发明的特征和优点,附图是示意性的而不应理解为对本发明进行任何限制,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,可以根据这些附图获得其他的附图。其中:
[0037]
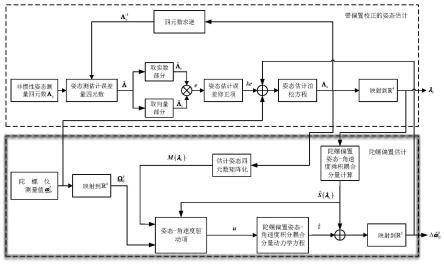
图1是本发明的一种微机电陀螺非线性偏置在线估计方法流程图;
[0038]
图2是根据本发明的一个实施例的索并联机器人平台的配置图;
[0039]
图3是根据本发明的一个实施例的索并联机器人的末端执行器;
[0040]
图4是根据本发明的一个实施例的外部传感器采集的末端执行器运动轨迹图;
[0041]
图5是根据本发明的一个实施例的外部传感器采集的末端执行器姿态图;
[0042]
图6是根据本发明的一个实施例的mems惯性传感器采集图;
[0043]
图7是根据本发明的一个实施例的gi、rho、iekf和nrbo四种姿态估计方法姿态对比结果;
[0044]
图8是根据本发明的一个实施例的四种方法姿态误差的均方根误差结果;
[0045]
图9是根据本发明的一个实施例的rho方法估计的陀螺偏置;
[0046]
图10是根据本发明的一个实施例的iekf方法估计的陀螺偏置;
[0047]
图11是根据本发明的一个实施例的nrbo方法估计的陀螺偏置;
[0048]
图12是根据本发明的一个实施例的rho_gi、iekf_gi和nrbo_gi方法姿态误差的均方根误差结果;
具体实施方式
[0049]
为了能够更清楚地理解本发明的上述目的、特征和优点,下面结合附图和具体实施方式对本发明进行进一步的详细描述。需要说明的是,在不冲突的情况下,本发明的实施例及实施例中的特征可以相互组合。
[0050]
在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是,本发明还可以采用其他不同于在此描述的其他方式来实施,因此,本发明的保护范围并不受下面公开的具体实施例的限制。
[0051]
本发明提供的一种利用非惯性姿态测量值在线观测微机电陀螺仪偏置的非线性观测器,以提高精度和鲁棒性为动机,对影响陀螺仪偏置的因素分类建模,完成“高质量”陀螺偏置校正,从而提高低成本组合导航系统的可靠性和实用性。非惯性姿态测量值可来源于视觉导航系统、marg(magnetic,angular rate,and gravity)或组合导航系统。非惯性姿态测量四元数与陀螺仪测量角速度共同作为mems陀螺仪偏置非线性观测器的输入,首先完
成带偏置校正的姿态估计。而后估计姿态输入到非线性放大环节的前馈环路,完成陀螺偏置乘积耦合分量的估计。设计该环节的放大增益,即可保证了载体运动过程中陀螺仪偏置的不稳定性和姿态估计误差,不影响陀螺偏置观测结果的鲁棒性。接着将mems陀螺测量的角速度,估计姿态以及陀螺偏置乘积耦合分量输入到一阶非线性反馈系统中,得到陀螺偏置积分耦合分量。调整一阶非线性反馈增益可以保证状态观测器的全局渐近稳定性。
[0052]
具体的,如图1所示为本发明的一种微机电陀螺非线性偏置在线估计方法流程图,图2为根据本发明的一个实施例的索并联机器人平台的配置图,一种微机电陀螺非线性偏置在线估计方法,包括以下步骤:
[0053]
s1:利用商用级mems惯性传感器和外部姿态传感器获取陀螺角速度和非惯性姿态测量值,并对陀螺角速度测量值进行静态偏置校正、去噪及映射预处理,对非惯性姿态测量值进行映射预处理。
[0054]
优选的,所述步骤s1的具体步骤为:
[0055]
s1-1:设计一个安装有mems惯性传感器和外部姿态传感器的微惯性组合导航平台。
[0056]
s1-2:设计期望轨迹,完成动态实验,利用mems惯性传感器和外部姿态传感器,实时采集陀螺角速度和非惯性姿态测量值。
[0057]
s1-3:根据运动起始的时刻,截取步骤s1-2陀螺角速度中的陀螺仪初始静止阶段输出,将该阶段陀螺仪输出的均值视为mems陀螺的初始确定性偏置,对运动阶段的陀螺角速度进行静态偏置校正。
[0058]
s1-4:将步骤s1-3的处理结果利用窗口长度为10的滑动平均滤波器去除振动噪声。
[0059]
s1-5:定义超复映射r=h(r),其中h:5:定义超复映射r=h(r),其中h:为三维欧几里得空间,r=[r
x r
y rz]
t
为任意三维空间向量,r=0+ir
x
+jry+krz为超复映射后的四元数,i,j,k为虚数单位。使用超复映射h将步骤s1-2的非惯性姿态λc和步骤s1-4的陀螺角速度分别映射为非惯性姿态测量四元数λc和陀螺仪测量值四元数
[0060]
s2:构建在线观测陀螺仪偏置的非线性观测器,以步骤s1得到的传感器信息为输入进行带偏置校正的姿态估计和陀螺偏置估计。
[0061]
优选的,所述步骤s2的具体步骤为:
[0062]
s2-1:将运动起始的时刻作为初始时刻,根据步骤s1-2数据的最小采样时刻确定积分时刻t,其中t=1,2,
…
,其中初始0时刻姿态估计四元数λ
o0
取值等于初始0时刻非惯性测量四元数λ
c0
,初始0时刻陀螺偏置估计值满足下面从1时刻开始逐一时刻地估计姿态和陀螺偏置。
[0063]
s2-2:提取步骤s1-5中t时刻的非惯性姿态测量四元数λ
ct
,将(t-1)时刻的姿态估计四元数λ
o(t-1)
取逆,根据下式计算出t时刻的姿态估计反馈项e
t
:
[0064][0065]
其中,右下角标t或(t-1)代表步骤s2-1中划分的积分时刻,为姿态估计误差四
元数,是姿态估计四元数的逆和非惯性测量四元数λc的四元数乘积,为的实数部分,为的向量部分,代表姿态估计反馈项。
[0066]
s2-3:将步骤s2-2的处理结果放大得到姿态估计修正项ke
t
,同时提取t时刻步骤s1-4中的处理结果和(t-1)时刻陀螺偏置估计值t时刻的姿态估计修正项ke
t
、t时刻的陀螺仪测量值与(t-1)时刻的陀螺偏置估计值三者共同驱动姿态估计泊松方程,如下式
[0067][0068]
从而实现带偏置校正的姿态估计,得到t时刻的姿态估计四元数λ
ot
。
[0069]
s2-4:定义映射其中h:γ为任意四元数γ=τ0+iτ1+jτ2+kτ3,为该四元数对应的列向量使用映射h将步骤s2-3的处理结果λ
ot
映射为t时刻姿态估计四元数向量λ
ot
,经过一阶非线性前馈放大环节,如下式
[0070][0071]
得到t时刻陀螺偏置乘积耦合分量的估计其中,是一阶非线性前馈放大环节t时刻的增益矩阵。
[0072]
s2-5:提取t时刻步骤s1-5中的陀螺仪测量值四元数步骤s2-4中的姿态估计四元数向量λ
ot
与陀螺偏置乘积耦合分量共同合成t时刻姿态-角速度驱动项u
t
,输入到一阶非线性反馈系统中,得到t时刻陀螺偏置积分耦合分量的估计具体公式如下,
[0073][0074]
其中,为t时刻一阶非线性反馈系统的增益矩阵,该矩阵有一个为零的特征值和三个正特征值,u
t
∈r4。
[0075]
s2-6:提取t时刻步骤s2-4和步骤s2-5的处理结果,陀螺偏置乘积耦合分量的估计与陀螺偏置积分耦合分量的估计相加得到t时刻陀螺偏置估计值四元数使用h和h复合后的逆映射得到t时刻陀螺偏置估计值即满足
[0076][0077]
其中,表示映射的复合。
[0078]
s2-7:重复步骤s2-2至s2-6,直到完成所有时刻带偏置校正的姿态估计和陀螺偏置估计。
[0079]
在此基础上,本发明利用微惯性组合导航平台进行载体自身振动环境影响下的动态实验,进一步验证了该非线性观测器的观测精度。采用的具体方法为:利用安装了mems惯性传感器和外部姿态传感器的微惯性组合导航平台进行动态试验。以高精度外部姿态传感
器的输出值作为姿态参考值,利用步骤s1-2的原始数据评估四种姿态估计方法的精度,包括陀螺积分(gyro integrating-gi)、鲁棒混合观测器(rho)、迭代扩展卡尔曼滤波(iekf)和本发明提出的方法(nrbo)。由于没有陀螺偏置的真实值,难以直接判断rho、iekf和nrbo方法的陀螺偏置估计精度。然而,考虑到陀螺输出经过真实的陀螺偏置校正后,输入到gi算法中可以得到精确的姿态。故使用rho、iekf和nrbo方法估计的陀螺偏置作为gi方法陀螺输入的实时校正,根据rho_gi、iekf_gi和nrbo_gi方法解算的姿态间接判断rho、iekf和nrbo方法陀螺偏置的精度。
[0080]
下面通过一个具体的实施例来具体说明本发明的微机电陀螺非线性偏置在线估计方法及其精度验证。
[0081]
微机电陀螺非线性偏置在线估计方法依赖于高精度的外部姿态传感器测量值,故设计了一个安装有mems惯性传感器和optitrack运动捕捉系统的索并联机器人平台,进行载体自身振动影响下的动态试验。选择索并联机器人实验平台为本实施例的微惯性组合导航平台,该平台由电机、柔索、末端执行器等组成,如图2所示。索并联机器人的运动控制执行单元是埃斯顿estun伺服电机,四个电机位于4.8m
×
3.8m的矩形的顶点处,距地面高度为2.5m。每个电机都通过柔索与末端执行器相连,如图3所示,在末端执行器上安装了清华微机械陀螺实验室研制的wcg-1型号imu。相邻电机之间各安装两个运动捕捉相机flex 13,共计八个相机组成optitrack运动捕捉系统。其中,wcg-1型号imu和optitrack运动捕捉系统的规格见表1。
[0082]
表1 wcg-1和optitrack系统的技术参数
[0083][0084]
利用电机控制柔索,可以使末端执行器在工作空间内完成任意轨迹的运动,在本实验中,控制索并联机器人末端执行器完成了近似“z”形轨迹的运动。末端执行器运动总共持续了347.465s,前18秒末端执行器处于静止状态,18-25s末端执行器竖直向上运动,25-168s末端执行器完成“z”形轨迹,168-320s末端执行器沿“z”形轨迹返回起始点,在起始点停留27秒,结束实验。其中在25s、70s、121s、168s、215s、265s、311s、320s时刻末端执行器到达“z”形轨迹上的不同拐弯点,各有2至3秒的停留。末端执行器运动过程中,optitrack系统以120hz的帧率采集数据,捕获到的末端执行器位置和姿态信息分别如图4、图5所示;wcg-1型号imu以200hz的频率采集数据,输出的角速度信息如图6所示。
[0085]
由图4可以看出,a点为起始点,b、c、d、e各点为拐弯点,末端执行器精确地完成了“z”形轨迹的运动。由图5可以看出,在18s、120s、200s、230s等时刻姿态值有轻微跳变,对其做频谱分析可知存在6hz左右的低频噪声,这是由于索并联机器人是欠约束的、并且柔索有弹性,说明了末端执行器的运动处于振动环境中。由图6可以看出,在25s、70s、121s、168s、215s、265s、311s、320s等时刻mems传感器输出几乎为0,这是由于末端执行器分别在b、c、d、
e、d、c、b、a等拐弯点停留。对图6的惯性信息做频谱分析可知,mems传感器输出中也存在6hz左右的低频噪声,印证了安装着mems传感器的末端执行器是在振动环境下完成预定轨迹的。
[0086]
利用实验获取的数据评估了四种姿态估计算法,包括gi、rho、iekf和nrbo。考虑到补偿静态陀螺偏置可以有效地提升这四种算法的收敛速度,将0-18s静基座下陀螺输出的均值作为陀螺偏置静态补偿值,并使用窗口长度为10的滑动平均滤波器作预处理。
[0087]
选取rho算法的增益参数k为2,选取nrbo算法的非线性参数为
[0088][0089][0090]
其中和为陀螺仪测量值预处理后的三轴角速度平均值。
[0091]
在此参数下,四种算法估计的末端执行器姿态对比如图7所示,姿态的均方根误差(rmse)如图8所示。由图7、图8可以看出,gi算法估计的三轴姿态都出现了漂移,最严重的偏航角rmse甚至超过2
°
。rho、iekf和nrbo算法的三轴姿态能够较好地跟踪参考值,三种算法三轴姿态rmse都不超过0.5
°
。这是由于载体运动过程中存在陀螺漂移,证明了rho、iekf和nrbo算法姿态精度都要高于gi算法。此外,由图7的局部放大图、图8可以看出,与rho、iekf算法相比,nrbo算法估计的三轴姿态更接近参考值,三轴姿态的rmse也更小,这证明了在rho、iekf和nrbo算法的姿态估计都比较精确的情况下,nrbo算法的效果要更好一些。
[0092]
rho、iekf和nrbo这三种算法在估计出较为精确姿态的同时,还能够在线估计出陀螺偏置,分别如图9、图10和图11所示。由图9-图11可以看出,在末端执行器上升过程中,柔索的弹性导致末端执行器产生较大的晃动,此阶段估计出的陀螺偏置有较大抖动,说明陀螺偏置对载体的运动状态敏感,验证了有专家指出“商用级mems表现出动力学敏感性”的观点。另外,在末端执行器的整个运动过程中,陀螺偏置时时变化,与rho算法中陀螺偏置关于时间导数为零的假设相悖,因此难以用线性模型描述陀螺漂移。
[0093]
由于没有陀螺偏置的真实值,难以直接根据图9-图11判断rho、iekf和nrbo算法的陀螺偏置估计精度。然而,有专家指出陀螺输出经过真实的陀螺偏置校正后,输入到gi算法中可以得到精确的姿态。故使用rho、iekf和nrbo算法估计的陀螺偏置对陀螺输出实时校正,将校正后的陀螺输出积分得到姿态的过程分别称为rho_gi、iekf_gi和nrbo_gi算法。通过比较rho_gi、iekf_gi和nrbo_gi算法估计的姿态误差,可以间接说明rho、iekf和nrbo算法陀螺偏置的精度。以optitrack系统捕捉的高精度末端执行器姿态为参考,由rho_gi、iekf_gi和nrbo_gi算法估计的姿态均方根误差(rmse)如图12所示。
[0094]
由图12可以看出,rho_gi算法三轴姿态的均方根误差都超过了10
°
,姿态精度反而不如图8的gi算法,说明在陀螺输出的校正过程产生了过度补偿,也就是说rho算法在线估计陀螺偏置的精度有较大的提升空间。iekf_gi算法三轴姿态的均方根误差在0.6
°
到3
°
之间,其中末端执行器滚转角和俯仰角精度反而不如图8中的gi算法,说明iekf在这两个轴向估计的陀螺偏置不够准确,产生了过度补偿。对比而言,nrbo_gi算法三轴姿态的均方根误差都小于0.6
°
,平均比rho_gi算法提升了约70倍,比iekf_gi算法提升了3倍,比图8中的gi
算法提升了1.2倍,这证明了在陀螺漂移模型未知的情况下,nrbo算法在线估计陀螺偏置的优越性,验证了本发明的假设。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1