一种无人驾驶的探地雷达深层病害智能感知系统及装置的制作方法
1.本发明涉及路面无损检测中使用的探地雷达深层病害探测技术领域,尤其涉及可自动对各类道路病害情况进行探测、录像、存储、展示等操作,已到达对各类道路病害的前面智能化检测及系统化分析的一种无人驾驶的探地雷达深层病害智能感知系统及装置。
背景技术:
2.目前,现有道路病害探测技术多以人工或半智能化为主,人为操作检测设备,或在车后悬挂检测设备,人力物力投入巨大,且主观因素干扰严重,易塌方应急检测路段操作人员安全无法保障。系统结构多以拼装组合的方式进行,自动驾驶与探地雷达各自独立运行,缺乏主控单元作为系统控制中心,无法对自动驾驶与探地雷达等设备进行统一调配,因此不能使整个检测过程科学有序的进行。
技术实现要素:
3.本发明针对当前道路病害探测技术的缺陷问题,抛弃传统的人为操作或车后悬挂检测设备的方式,通过自主研发的控制单元,将系统各组成部件(如自动驾驶、车辆定位、探地雷达等)有序结合,提供可根据不同路况,不同检测场景,自动控制各部件工作状态及动作执行,使道路检测功能更加科学完善,可实现无人干预,自动驾驶并完成道路病害检测任务,无人为主观因素干扰,使数据参考价值更大,同时能够减少道路病害检测的人力及物力投入,保障道路检测人员人身安全的一种无人驾驶的探地雷达深层病害智能感知系统及装置。
4.本发明采用的技术方案是:
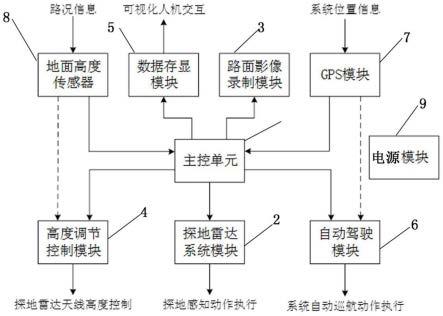
5.一种无人驾驶的探地雷达深层病害智能感知系统,包括主控单元、探地雷达系统模块、路面影像录制模块、高度调节控制模块、数据存显模块、自动驾驶模块、gps模块、地面高度传感器及电源模块,所述主控单元分别与探地雷达系统模块、路面影像录制模块、高度调节控制模块、数据存显模块、自动驾驶模块、gps模块、地面高度传感器连接;所述gps模块与自动驾驶模块之间存在数据传输,所述gps模块与探地雷达系统模块之间存在数据传输,所述地面高度传感器与高度调节控制模块之间存在数据传输;
6.所述主控单元:系统控制核心,负责整个系统各组成部分的数据采集处理及运行控制;
7.所述探地雷达系统模块:道路深层病害感知执行机构;
8.所述路面影像录制模块:用于录制检测道路实际情况;
9.所述高度调节控制模块:用于探地雷达天线高度控制和调节,避免因底线起伏造成探地雷达天线损坏;
10.所述数据存显模块:用于将系统获取或产生的数据进行存储或显示,形成可视化人机交互;
11.所述自动驾驶模块:用于控制电动机、转向控制电机动作执行,进而控制系统行驶
轨迹;
12.所述gps模块:用于系统实时定位,为自动驾驶提供位置信息,为探地雷达数据采集提供定位信息;
13.所述地面高度传感器:收集前方地面高度信息,并将其反馈至主控单元;
14.所述电源模块:给整个系统提供电能。
15.进一步的,所述主控单元作为系统控制核心,主要包括以下功能部件:mcu及mcu最小系统、三极管驱动电路、串口通信电路1、串口通信电路2、串口通信电路3、串口通信电路4、显示屏驱动电路、变送信号采集电路;
16.所述mcu:为核心控制器(如stm32f407),用于主控单元数据处理及通信;
17.所述mcu最小系统:包括ldo、晶振,为使mcu可正常工作的必要电路;
18.所述变送信号采集电路:由采样电阻及运算放大器组成,用于对地面高度传感器输出的信号(4-20ma)进行采集,并接入mcu的adc引脚,进行距离计算;
19.所述三极管驱动电路:用于放大mcu控制信号,进而对高度调节控制模块进行控制,使其进行相应动作;
20.所述串口通信电路1:用于mcu与探地雷达间数据通信,使mcu可以接收探地雷达回传信息,并向探地雷达发送控制指令;
21.所述串口通信电路2:用于mcu与自动驾驶模块间数据通信,使mcu可以接收自动驾驶模块回传信息,并向自动驾驶模块发送控制指令;
22.所述串口通信电路3:用于mcu与gps模块间数据通信,使mcu可以对gps模块进行配置,并接收gps模块回传的位置信息;
23.所述串口通信电路4:用于mcu与路面影像录制模块间数据通信,使mcu可以向路面影像录制模块发送控制指令,控制其录制动作;
24.所述显示屏驱动电路:用于驱动显示屏进行信息展示。
25.进一步的,所述无人驾驶的探地雷达深层病害智能感知系统还包括有用于设置各功能组件的小车,驱动小车行进、转向的驱动电机,及用于获取车轮转数信息的编码器。
26.一种无人驾驶的探地雷达深层病害智能感知装置,包括小车,小车底板的左右两侧各设置有两个车轮,小车底板中部设置有探地雷达天线放置区,所述探地雷达天线放置区贯穿小车底板,其中设置有探地雷达天线放置盒,所述探地雷达天线放置盒可以透过小车底板上下移动;探地雷达天线放置盒内部设置有探地雷达天线;所述探地雷达天线放置盒与小车底板之间设置有高度调节控制单元,所述高度调节控制单元能够驱动探地雷达天线放置盒相对于小车底板上下移动;所述小车底板上还设置有主控单元、探地雷达系统模块、路面影像录制模块、高度调节控制模块、数据存显模块、自动驾驶模块、gps模块及电源模块;所述小车底板的前端设置有距离传感器和地面高度传感器,小车底板的后端设置有gps天线固定孔位,所述gps天线固定孔位内固定设置有gps天线支撑杆,gps天线支撑杆的顶端设置有gps天线;所述小车上方设置有路面影像摄像头以及显示屏;所述小车底板的左右两侧均设置有用于驱动车轮的驱动电机。
27.进一步的,所述小车底板上方罩设有外壳,所述探地雷达天线放置盒、高度调节控制单元、主控单元、探地雷达系统模块、路面影像录制模块、高度调节控制模块、数据存显模块、自动驾驶模块、gps模块、电源模块及驱动电机均位于外壳内部;所述距离传感器与地面
高度传感器均设置于靠近小车底板前端的外壳外侧;所述路面影像摄像头及显示屏均位于外壳顶面上。
28.进一步的,所述高度调节控制单元包括固定设置在小车底板上、位于探地雷达天线放置区外部的立柱,固定设置在立柱靠近其顶端位置的升降电机,套设在升降电机主轴上的齿轮,以及固定竖直设置在探地雷达天线放置盒侧壁上,与齿轮相啮合的齿条。
29.进一步的,所述驱动电机通过传动链条带动与其同侧的两个车轮转动。
30.进一步的,所述小车底板上靠近车轮处设置有用于采集车轮转动圈数数值的编码器。
31.进一步的,路面影像摄像头与外壳顶面之间竖直设置有高度调节杆,所述高度调节杆为多层套管结构,每层套管上均开设有销孔,销孔内设置有固定销。
32.本发明的有益效果在于,本发明提供的一种无人驾驶的探地雷达深层病害智能感知系统及装置具有如下优点:
33.1.无人驾驶,节省人力物力,能更好的投入危险路段应急检测,同时排除人为主观因素干扰,探测线路及范围更加合理,数据参考性更强;
34.2.集成化高,表面影像及深层病害的双重探测,对道路健康检查更加全面;
35.3.数据安全程度高,可对路面破损情况及深层病害数据进行自动存储,保障数据有效性及安全性,避免数据流失;
36.4.智能化程度高,通过各类传感器对路段信息的分析,自动进行避障及探地雷达天线升降等动作,比较异常路段对设备造成的危害,延长设计试用时长。
37.总之,本发明提供的一种无人驾驶的探地雷达深层病害智能感知系统及装置具有通过自主研发的控制单元,将系统各组成部件(如自动驾驶、车辆定位、探地雷达等)有序结合,提供可根据不同路况,不同检测场景,自动控制各部件工作状态及动作执行,使道路检测功能更加科学完善,可实现无人干预,自动驾驶并完成道路病害检测任务,无人为主观因素干扰,使数据参考价值更大,同时能够减少道路病害检测的人力及物力投入,保障道路检测人员人身安全的优点。
附图说明
38.图1是本发明提供的一种无人驾驶的探地雷达深层病害智能感知系统及的原理结构示意图;
39.图2是本发明提供的一种无人驾驶的探地雷达深层病害智能感知系统中主控单元的原理结构示意图;
40.图3是本发明提供的一种无人驾驶的探地雷达深层病害智能感知装置的俯视结构示意图;
41.图4是本发明提供的一种无人驾驶的探地雷达深层病害智能感知装置的侧视结构示意图;
42.图5是本发明提供的一种无人驾驶的探地雷达深层病害智能感知装置中高度调节控制单元部分的结构示意图。
43.图中:1、主控单元;2、探地雷达系统模块;3、路面影像录制模块;4、高度调节控制模块;5、数据存显模块;6、自动驾驶模块;7、gps模块;8、地面高度传感器;9、电源模块;10、
小车;11、驱动电机;12编码器;13、探地雷达天线放置盒;14、探地雷达天线;15、高度调节控制单元;16、gps天线固定孔位;17、gps天线支撑杆;18、gps天线;19、路面影像摄像头;20、显示屏;21、外壳;22、距离传感器;23、传动链条;24、高度调节杆;1501、立柱;1502、升降电机;1503、齿轮;1504、齿条。
具体实施方式
44.本发明的核心是提供一种无人驾驶的探地雷达深层病害智能感知系统及装置。
45.下面结合附图对本发明的内容作进一步说明:
46.其中,一种无人驾驶的探地雷达深层病害智能感知系统,如图1~2所示,包括主控单元1、探地雷达系统模块2、路面影像录制模块3、高度调节控制模块4、数据存显模块5、自动驾驶模块6、gps模块7、地面高度传感器8及电源模块9,主控单元1分别与探地雷达系统模块2、路面影像录制模块3、高度调节控制模块4、数据存显模块5、自动驾驶模块6、gps模块7、地面高度传感器8连接;所述gps模块7与自动驾驶模块6之间存在数据传输,所述gps模块7与探地雷达系统模块2之间存在数据传输,地面高度传感器8与高度调节控制模块4之间存在数据传输;
47.以上各部件功能说明如下:
48.主控单元1:系统控制核心,负责整个系统各组成部分的数据采集处理及运行控制;
49.探地雷达系统模块2:道路深层病害感知执行机构;
50.路面影像录制模块3:用于录制检测道路实际情况;
51.高度调节控制模块4:用于探地雷达天线高度控制和调节,避免因底线起伏造成探地雷达天线损坏;
52.数据存显模块5:用于将系统获取或产生的数据进行存储或显示,形成可视化人机交互;
53.自动驾驶模块6:用于控制电动机、转向控制电机动作执行,进而控制系统行驶轨迹;
54.gps模块7:用于系统实时定位,为自动驾驶提供位置信息,为探地雷达数据采集提供定位信息;
55.地面高度传感器8:收集前方地面高度信息,并将其反馈至主控单元;
56.电源模块9:给整个系统提供电能。
57.上述主控单元1作为系统控制核心,主要包括以下功能部件:mcu及mcu最小系统、三极管驱动电路、串口通信电路1、串口通信电路2、串口通信电路3、串口通信电路4、显示屏驱动电路、变送信号采集电路;
58.其中mcu:为核心控制器(如stm32f407),用于主控单元1数据处理及通信;
59.mcu最小系统:包括ldo、晶振等,为使mcu可正常工作的必要电路;
60.变送信号采集电路:由采样电阻及运算放大器组成,用于对地面高度传感器8输出的信号(4-20ma)进行采集,并接入mcu的adc引脚,进行距离计算;
61.三极管驱动电路:用于放大mcu控制信号,进而对高度调节控制模块4进行控制,使其进行相应动作;
62.串口通信电路1:用于mcu与探地雷达间数据通信,使mcu可以接收探地雷达回传信息,并向探地雷达发送控制指令;
63.串口通信电路2:用于mcu与自动驾驶模块6间数据通信,使mcu可以接收自动驾驶模块6回传信息,并向自动驾驶模块6发送控制指令;
64.串口通信电路3:用于mcu与gps模块7间数据通信,使mcu可以对gps模块7进行配置,并接收gps模块7回传的位置信息;
65.串口通信电路4:用于mcu与路面影像录制模块3间数据通信,使mcu可以向路面影像录制模块3发送控制指令,控制其录制动作;
66.显示屏驱动电路:用于驱动显示屏20进行信息展示。
67.上述无人驾驶的探地雷达深层病害智能感知系统还包括有用于设置各功能组件的小车10,驱动小车10行进及转向的驱动电机11,及用于获取车轮转数信息的编码器12。
68.一种采用上述无人驾驶的探地雷达深层病害智能感知系统的装置,如图3~5所示,包括小车10,在小车10底板的左右两侧各设置有两个车轮,小车10底板中部设置有探地雷达天线放置区,探地雷达天线放置区贯穿小车10底板,其中设置有探地雷达天线放置盒13,探地雷达天线放置盒13可以透过小车10底板上下移动;探地雷达天线放置盒13内部设置有探地雷达天线14;探地雷达天线放置盒13与小车10底板之间设置有高度调节控制单元15,高度调节控制单元15能够驱动探地雷达天线放置盒13相对于小车10底板上下移动,高度调节控制单元15包括固定设置在小车10底板上、位于探地雷达天线放置区外部的立柱1501,固定设置在立柱1501靠近其顶端位置的升降电机1502,套设在升降电机1502主轴上的齿轮1503,以及固定竖直设置在探地雷达天线放置盒13侧壁上,与齿轮1503相啮合的齿条1504,本实施例中,采用两套高度调节控制单元15,分别相对安装在探地雷达天线放置盒13的前后两端;小车10底板上还设置有主控单元1、探地雷达系统模块2、路面影像录制模块3、高度调节控制模块4、数据存显模块5、自动驾驶模块6、gps模块7及电源模块9;小车10底板的前端设置有距离传感器22和地面高度传感器8,小车10底板的后端设置有gps天线固定孔位16,gps天线固定孔位16内固定设置有gps天线支撑杆17,gps天线支撑杆17的顶端设置有gps天线18;小车10上方设置有路面影像摄像头19以及显示屏20;所述小车10底板的左右两侧均设置有用于驱动车轮的驱动电机11,驱动电机11通过传动链条23带动与其同侧的两个车轮转动及转向;小车10底板上靠近车轮处设置有用于采集车轮转动圈数数值的编码器12。
69.小车10底板上方罩设有外壳21,上述探地雷达天线放置盒12、高度调节控制单元15、主控单元1、探地雷达系统模块2、路面影像录制模块3、高度调节控制模块4、数据存显模块5、自动驾驶模块6、gps模块7、电源模块9及驱动电机11均位于外壳21内部;距离传感器22与地面高度传感器8均设置于靠近小车10底板前端的外壳21外侧;路面影像摄像头19及显示屏20均位于外壳21顶面上,路面影像摄像头19与外壳21顶面之间竖直设置有具有伸缩结构的高度调节杆24,本实施例中高度调节杆24为多层套管结构,每层套管上均开设有销孔,销孔内设置有固定销,通过调整多层套管的相对位置,进而可以调整路面影像摄像头19的高度。
70.系统功能逻辑说明
71.如图1一种无人驾驶的探地雷达深层病害智能感知系统及的原理结构示意图所示
的系统功能框架,系统功能逻辑由主控单元统一管理并调配各组成部分执行相应动作。
72.1.车轮为两侧各一组,共两组,由电动机驱动前后行驶及转向动作。
73.2.gps模块负责系统实时定位,并将定位信息发送至主控单元,由主控单元判断并处理后发送至自动驾驶模块,进而控制自动巡航检测路线,为自动驾驶模块提供位置信息,并距离传感器负责感知前方是否有障碍物存在,同时将障碍物信息反馈至自动驾驶模块,自动驾驶模块启动避障动作,控制电动机进行转向等操作绕过障碍物。
74.3.左侧安装由编码器,以编码器转动圈数为依据,主控单元通过转动圈数及车轮周长,计算得出行驶距离,并以此触发探地雷达进行工作,用以获取道路路面破损信息及路面下方5m深度范围内的隐性病害信息,并对数据信息进行自动存储。
75.4.如果图5探地雷达高度调节控制单元结构示意图所示,系统通过地面高度传感器收集前方地面高度信息,并将其反馈至主控单元,由主控单元处理计算前方路况(前方道路起伏情况),进而控制高度调节控制单元进行升降动作(升降动作由升降电机执行,并在齿轮及齿条带动下,使探地雷达天线放置盒带动探地雷达天线同时进行升降动作),以达到平整路段放低探地雷达天线,颠簸路段抬高探地雷达天线的效果。
76.5.路面影像录制模块通过摄像头对路面破损情况进行录制,并存储,并将影像信息在数据管理平台地图页面进行展示。
77.根据上述具体实施方式可见,本发明提供的一种无人驾驶的探地雷达深层病害智能感知系统及装置具有通过自主研发的控制单元,将系统各组成部件(如自动驾驶、车辆定位、探地雷达等)有序结合,提供可根据不同路况,不同检测场景,自动控制各部件工作状态及动作执行,使道路检测功能更加科学完善,可实现无人干预,自动驾驶并完成道路病害检测任务,无人为主观因素干扰,使数据参考价值更大,同时能够减少道路病害检测的人力及物力投入,保障道路检测人员人身安全的优点。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1