一种快速响应火箭的自主初始对准方法与流程
1.本发明涉及火箭发射技术领域,尤其是涉及一种快速响应火箭的自主初始对准方法。
背景技术:
2.快速响应火箭,也被称为快速反应火箭,它其实代表了目前航天领域一个发展分支,那就是快速发射技术。
3.随着快速响应火箭的发展,对发射流程的自主化、快速化有越来越高的要求,提出了无依托发射、快速发射、无人值守等要求,传统运载火箭初始对准的方法无法完全满足这些要求。
4.现有技术中火箭的初始对准方法有三种,方法一:依靠外部设备(比如发射车、地面设备等)进行初始对准。将地面设备初始对准结果传递给火箭使用,该方法存在的缺陷是需要额外增加一套高精度惯组,还需要增加抗干扰算法,不仅增加了系统成本,也增加了算法的复杂性,无法实现真正的无依托发射;方法二:使用光学瞄准设备依靠人工进行初始对准。将火箭垂直放置于发射场上,使用光学设备对准火箭上的棱镜进行角度测量,最后换算至火箭的方位角,该方法技术成熟,但是存在的缺陷是耗时较长,需要依靠光学瞄准设备,不能实现无依托、快速发射;方法三:采用自动对准方法。一般是在火箭垂直状态下的自对准,该方法存在的缺陷是不仅容易受到外部环境干扰,而且自动化程度不高,需要人工进行前期火箭起竖等流程,不能实现真正的自主快速发射。
技术实现要素:
5.本发明所要解决的技术问题是提供一种全自动、无依托,并且速度快、效率高的快速响应火箭的自主初始对准方法。
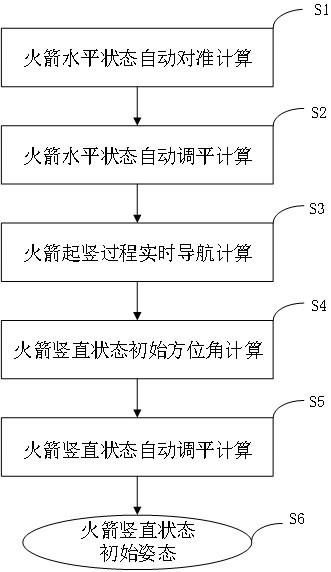
6.本发明所采用的技术方案是,一种快速响应火箭的自主初始对准方法,该方法包括下列步骤:s1、火箭水平状态的自动对准:火箭在水平状态下,箭上计算机运行火箭自对准算法,完成自对准计算,得到火箭的初始方位角;s2、火箭水平状态的自动调平:得到火箭的初始方位角后,箭上计算机运行火箭水平调平算法,完成调平计算,得到火箭在水平状态下的俯仰角和滚动角;s3、火箭起竖过程的实时导航:火箭起竖前,根据步骤s1和步骤s2得到火箭在水平状态的初始俯仰角、初始偏航角以及初始滚动角,即:=,=-,;其中,表示火箭的理论方位角;根据初始俯仰角、初始偏航角以及初始滚动角计算得到水平状态的初始姿态四元数;火箭起竖后,根据得到的初始姿态四元数,由箭上计算机开始进行导航计算来实时得到火箭在起竖过程中的姿态四元数;
s4、获取火箭竖直状态的初始方位角:火箭完成起竖后,得到火箭在最终的竖直状态下的姿态四元数,根据姿态四元数得到竖直状态下的初始方位角;s5、火箭竖直状态的自动调平:获取火箭竖直状态的初始方位角后,箭上计算机运行火箭竖直调平算法,完成调平计算,得到火箭在竖直状态下的俯仰角和偏航角;s6、获取火箭竖直状态的初始姿态:根据步骤s4和步骤s5来得到火箭在竖直状态的初始俯仰角、初始偏航角以及初始滚动角,即:,,;其中,表示火箭的理论方位角;s7、初始对准工作完成,火箭转入待发射状态。
7.本发明的有益效果是:采用上述一种快速响应火箭的自主初始对准方法,该方法能够实现快速响应火箭自主、快速地进行初始对准,全程无人工介入,自动获取火箭初始姿态角,实现无依托,并且,该方法在一定程度上简化了火箭发射流程,能够较好的达到快速发射的目的。
8.作为优选,在步骤s1中,箭上计算机运行火箭自对准算法来自对准计算得到火箭的初始方位角的具体过程包括下列步骤:s1.1、在t3时间内采集若干个由箭上惯组输出的角速度和加速度,计算若干个角速度的平均值和若干个加速度的平均值,得到平均角速度和平均加速度;s1.2、根据步骤s1.1得到的平均角速度和平均加速度得到箭体坐标系到北东地坐标系的转换矩阵,所述的箭体坐标系到北东地坐标系的转换矩阵的表达式为:,其中,表示火箭发射点的当地重力加速度,表示地球自转角速度,表示发射点地理纬度;s1.3、根据箭体坐标系到北东地坐标系的转换矩阵得到箭体坐标系到导航坐标系的转换矩阵,所述箭体坐标系到导航坐标系的转换矩阵的表达式为:其中,其中,其中,;根据所述箭体坐标系到导航坐标系的转换
矩阵的表达式,求解得到箭体坐标系到导航坐标系的转换矩阵为:,其中,、、、、、、、以及均表示转换矩阵的矩阵元素;s1.4、根据箭体坐标系到导航坐标系的转换矩阵m2得到俯仰角偏差、偏航角偏差、滚动角偏差以及初始方位角,所述的俯仰角偏差,所述的偏航角偏差,所述的滚动角偏差,所述的初始方位角。
9.作为优选,在步骤s2中,箭上计算机运行火箭水平调平算法计算火箭在水平状态下的俯仰角和滚动角的具体表达式为:,;其中,表示箭上惯组在x轴方向上的速度增量在t1时间段内的累加和,表示箭上惯组在z轴方向上的速度增量在时间段内的累加和,为当地重力加速度,为累计时长。
10.作为优选,在步骤s3中,根据初始俯仰角、初始偏航角以及初始滚动角计算得到的水平状态的初始姿态四元数的表达式为:算得到的水平状态的初始姿态四元数的表达式为:算得到的水平状态的初始姿态四元数的表达式为:算得到的水平状态的初始姿态四元数的表达式为:
11.作为优选,在步骤s3中,由箭上计算机开始进行导航计算来实时得到火箭在起竖过程中的姿态四元数的具体表达式为:;其中,、、、表示火箭在起竖过程中的姿态四元数,表示当前时间点,表示前一个时间点,,
,,分别表示箭上惯组在箭体坐标系的x轴方向、y轴方向以及z轴方向上的输出角速度,分别表示箭上惯组在时间内输出的角增量,、以及分别表示地球自转角速度在箭体坐标系的x轴方向、y轴方向以及z轴方向上的分量,表示累计时长。
12.作为优选,在步骤s4中,所述的根据姿态四元数得到竖直状态下的初始方位角的具体表达式为:,其中,,,。
13.作为优选,在步骤s5中,箭上计算机通过运行火箭竖直调平算法计算得到火箭在竖直状态下的俯仰角和偏航角的具体表达式为:;其中,表示箭上惯组在y轴方向上的速度增量在时间段内的累加和,表示箭上惯组在z轴方向上的速度增量在t2时间段内的累加和,g表示当地重力加速度,t2表示累计时长。
附图说明
14.图1为本发明一种快速响应火箭的自主初始对准方法的流程图;图2为本发明中采用火箭自对准算法进行自对准计算得到火箭的初始方位角的流程图。
具体实施方式
15.以下参照附图并结合具体实施方式来进一步描述发明,以令本领域技术人员参照说明书文字能够据以实施,本发明保护范围并不受限于该具体实施方式。
16.本发明实施例提供了一种快速响应火箭的自主初始对准方法,该方法包括下列步骤:步骤一、发射装置按照预定要求停放到位:将火箭水平放置在发射装置上,发射装置按照预定的要求停放到位;这里的发射装置一般是指发射车,或者发射架;步骤二、地面测试发控系统完成全箭的水平状态测试;地面测试发控系统是指对运载火箭或导弹进行测试和发射控制的软硬件组台;现化的地面则试发控系统实际是以地面计算机为核心的分布式系统,采用弹测与地测相结合的测试方案和自动与手动结合的发射控制方式;步骤三、如图1所示,箭上计算机开始进行初始对准工作流程:s1、火箭水平状态的自动对准:火箭在水平状态下,箭上计算机运行火箭自对准算
法,完成自对准计算,得到火箭的初始方位角;这里的火箭自对准算法进行自对准计算的具体过程为:s1.1、在t3时间内采集若干个由箭上惯组输出的角速度和加速度,计算若干个角速度的平均值和若干个加速度的平均值,得到平均角速度和平均加速度;s1.2、根据步骤s1.1得到的平均角速度和平均加速度得到箭体坐标系到北东地坐标系的转换矩阵,所述的箭体坐标系到北东地坐标系的转换矩阵的表达式为: ,其中,表示火箭发射点的当地重力加速度,表示地球自转角速度,表示发射点地理纬度;平均角速度为包含三个元素的向量,平均加速度也为包含三个元素的向量;s1.3、根据箭体坐标系到北东地坐标系的转换矩阵得到箭体坐标系到导航坐标系的转换矩阵,所述箭体坐标系到导航坐标系的转换矩阵的表达式为:其中,其中,其中,;根据所述箭体坐标系到导航坐标系的转换矩阵m2的表达式,求解得到箭体坐标系到导航坐标系的转换矩阵为:,其中,、、、、、、、以及均表示转换矩阵的矩阵元素;s1.4、根据箭体坐标系到导航坐标系的转换矩阵得到俯仰角偏差、偏航角偏差、滚动角偏差以及初始方位角,所述的俯仰角偏差,所述的偏航角偏差,所述的滚动角偏差,所述的初始方位角;s2、火箭水平状态的自动调平:得到火箭的初始方位角后,箭上计算机运行火箭水
平调平算法,完成调平计算,得到火箭在水平状态下的俯仰角和滚动角;火箭水平调平算法进行调平计算的具体表达式为:,;其中,表示箭上惯组在x轴方向上的速度增量在t1时间段内的累加和,表示箭上惯组在z轴方向上的速度增量在t1时间段内的累加和,为当地重力加速度,为累计时长;s3、火箭起竖过程的实时导航:火箭起竖前,根据步骤s1和步骤s2得到火箭在水平状态的初始俯仰角、初始偏航角以及初始滚动角,=,=,;其中,表示火箭的理论方位角;根据初始俯仰角、初始偏航角以及初始滚动角计算得到水平状态的初始姿态四元数,所述的水平状态的初始姿态四元数的表达式为: ; ; ;;火箭起竖后,根据得到的水平状态的初始姿态四元数以及传统的惯性导航方法,由箭上计算机开始进行导航计算来实时得到火箭在起竖过程中的姿态四元数;所述的由箭上计算机开始进行导航计算来实时得到火箭在起竖过程中的姿态四元数的具体表达式为:;其中,、、、表示火箭在起竖过程中的姿态四元数,表示当前时间点,表示前一个时间点,,,,分别表示箭上惯组在箭体坐标系的x轴方向、y轴方向以及z轴方向上的输出角速度,分别表示箭上惯组在时间内输出的角增量,、以及分别表示地球自转角速度在箭体坐标系的x轴方向、y轴方向以及z轴方向上的分量,表示累计时长;
s4、获取火箭竖直状态的初始方位角:火箭完成起竖后,得到火箭在最终的竖直状态下的姿态四元数,根据姿态四元数得到竖直状态下的初始方位角;所述的根据姿态四元数得到竖直状态下的初始方位角的具体表达式为:,其中,,,;s5、火箭竖直状态的自动调平:获取火箭竖直状态的初始方位角后,箭上计算机运行火箭竖直调平算法,完成调平计算,得到火箭在竖直状态下的俯仰角和偏航角,其具体表达式为:;其中,表示箭上惯组在y轴方向上的速度增量在时间段内的累加和,表示箭上惯组在z轴方向上的速度增量在t2时间段内的累加和,表示当地重力加速度;s6、获取火箭竖直状态的初始姿态:根据步骤s4和步骤s5来得到火箭在竖直状态的初始俯仰角、初始偏航角以及初始滚动角,即:,,;其中,表示火箭的理论方位角;s7、初始对准工作完成,火箭转入待发射状态。
17.采用上述一种快速响应火箭的自主初始对准方法,箭上计算机开始进行初始对准工作流程的全程只需要大约30分钟就能完成火箭的初始对准工作,相比于现有技术(以快舟火箭为例,完成火箭的初始对准工作一般需要半天时间),该方法能够实现快速响应火箭自主、快速地进行初始对准,箭上计算机开始进行初始对准工作流程的整个过程中无人工介入,自动获取火箭初始姿态角,实现无依托,并且,该方法在一定程度上简化了火箭发射流程,能够较好的达到快速发射的目的。
18.以下为具体实例来说明本发明提出的一种快速响应火箭的自主初始对准方法。
19.一种快速响应火箭的自主初始对准方法,该方法包括下列步骤:步骤一、发射装置按照预定要求停放到位:将火箭水平放置在发射装置上,发射车按照预定的要求停放到位;步骤二、地面测试发控系统完成全箭的水平状态测试;步骤三、箭上计算机开始进行初始对准工作流程:s1、火箭水平状态的自动对准:火箭在水平状态下,箭上计算机运行火箭自对准算法,火箭自对准算法的过程为:s1.1、在600秒时长内采集若干个由箭上惯组输出的角速度和加速度,计算若干个角速度的平均值和若干个加速度的平均值,得到平均角速度的值为:1.0e-04 *[-0.3674125759433320.029955106166667
ꢀ‑
0.638357478449998],平均加速度的值为:
1.0e+02*[-9.7944387251173150.032417716400000-0.031235106483333];s1.2、根据步骤s1.1得到的平均角速度和平均加速度得到箭体坐标系到北东地坐标系的转换矩阵m1:[-0.0033349057284710.0450464860395840.998979325361275-0.0031627406475280.998979408944295-0.045057048026961-0.999989437681908-0.003309773525933-0.003189031801088];m1为3*3大小的矩阵;s1.3、根据箭体坐标系到北东地坐标系的转换矩阵得到箭体坐标系到导航坐标系的转换矩阵m2:[0.0031648102999370.007297791238072-0.9999683626089430.9999894376819080.0033097735259330.0031890318010880.003332941701670-0.999967893305706-0.007287239351134];m2为3*3大小的矩阵;s1.4、根据箭体坐标系到导航坐标系的转换矩阵m2得到俯仰角偏差、偏航角偏差、滚动角偏差以及初始方位角;完成自对准计算,得到火箭的初始方位角;s2、火箭水平状态的自动调平:得到火箭的初始方位角后,箭上计算机运行火箭水平调平算法,完成调平计算,得到火箭在水平状态下的俯仰角和滚动角,,其中,,,=20(秒),得到火箭在水平状态下的俯仰角=;火箭在水平状态下的滚动角=;s3、火箭起竖过程的实时导航:火箭起竖前,根据步骤s1和步骤s2得到火箭在水平状态的初始俯仰角=、初始偏航角=1773.863以及初始滚动角;根据初始俯仰角、初始偏航角以及初始滚动角计算得到水平状态的初始姿态四元数:;;
;;火箭起竖后,根据得到的初始姿态四元数以及传统的惯性导航方法,由箭上计算机开始进行导航计算来实时得到火箭在起竖过程中的姿态四元数:;s4、获取火箭竖直状态的初始方位角:火箭完成起竖后,得到火箭在最终的竖直状态下的姿态四元数:;根据姿态四元数得到竖直状态下滚动角,进一步得到竖直状态的初始方位角:进一步得到竖直状态的初始方位角:;s5、火箭竖直状态的自动调平:获取火箭竖直状态的初始方位角后,箭上计算机运行火箭竖直调平算法,完成调平计算,得到火箭在竖直状态下的俯仰角,偏航角;其中,=,,t2=20(秒),得到,;s6、获取火箭竖直状态的初始姿态:根据步骤s4和步骤s5来得到火箭在竖直状态的初始俯仰角、初始偏航角以及初始滚动角,即:,,;s7、初始对准工作完成,火箭转入待发射状态。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1