移动装置的定位初始化方法、设备、移动装置和存储介质与流程
本发明涉及自动驾驶领域,尤其涉及一种移动装置的定位初始化方法、设备、移动装置和存储介质。
背景技术:
1、随着自动驾驶技术的迭代更新,自动驾驶技术为无人环卫清扫、无人配送等行业的发展带来颠覆性的改变。使用无人清洁设备替代机械化是未来的趋势与走向。例如无人洗地车主要应用领域集中在各种国际大机场、城市交通枢纽站、知名工厂/企事业单位/院校/博物馆/商场等场所。对于任何无人驾驶车来讲,精准的定位是其正常运行的基础保障。
2、现阶段无人驾驶车辆的定位方案主要是基于先验地图的匹配定位方法。然而能够使车体位姿稳定输出的前提是,无人驾驶车辆在启动时能够正确地获取初始位姿,即定位初始化问题。定位初始化会告诉无人驾驶车辆当前在哪里,后续自动驾驶过程中的定位准确性完全取决于初始化定位的准确性。
3、现有技术中常用的无人驾驶车辆定位初始化的技术方案如下:
4、1、利用二维码进行定位初始化。在构建无人驾驶车辆行驶的地图时,将二维码的准确位姿存入地图之中。在无人驾驶车辆启动时,利用摄像头扫描识别安装在地图中的二维码标识,通过相机与二维码之间位姿变换,以及二维码在地图中的位姿,计算获得无人驾驶车辆启动时的精确位置与姿态,完成定位初始化过程。
5、2、利用gps进行定位初始化。对于运行在室外场景下的无人驾驶车辆,由于gps信号较好,可以利用gps获取无人驾驶车辆在启动时的位置与姿态。对于需要点云地图的场景,需要将点云地图与gps坐标系进行对齐。
6、在实现本发明过程中,发明人发现相关技术中至少存在如下问题:
7、上述两种方法都具有一定的局限性。二维码的方法需要预先布局摄像头传感器,并且需要在无人驾驶车辆运行场景安装二维码的标志,对场景进行改装。另一方面,利用gps定位初始化方法,在室外比较空旷的场景有效,然而对于室内运行的无人驾驶车辆,由于没有gps信号,该方案将完全失效。
技术实现思路
1、为了至少解决现有技术中初始化定位对于环境、场景局限性的问题。第一方面,本发明实施例提供一种移动装置的定位初始化方法,包括:
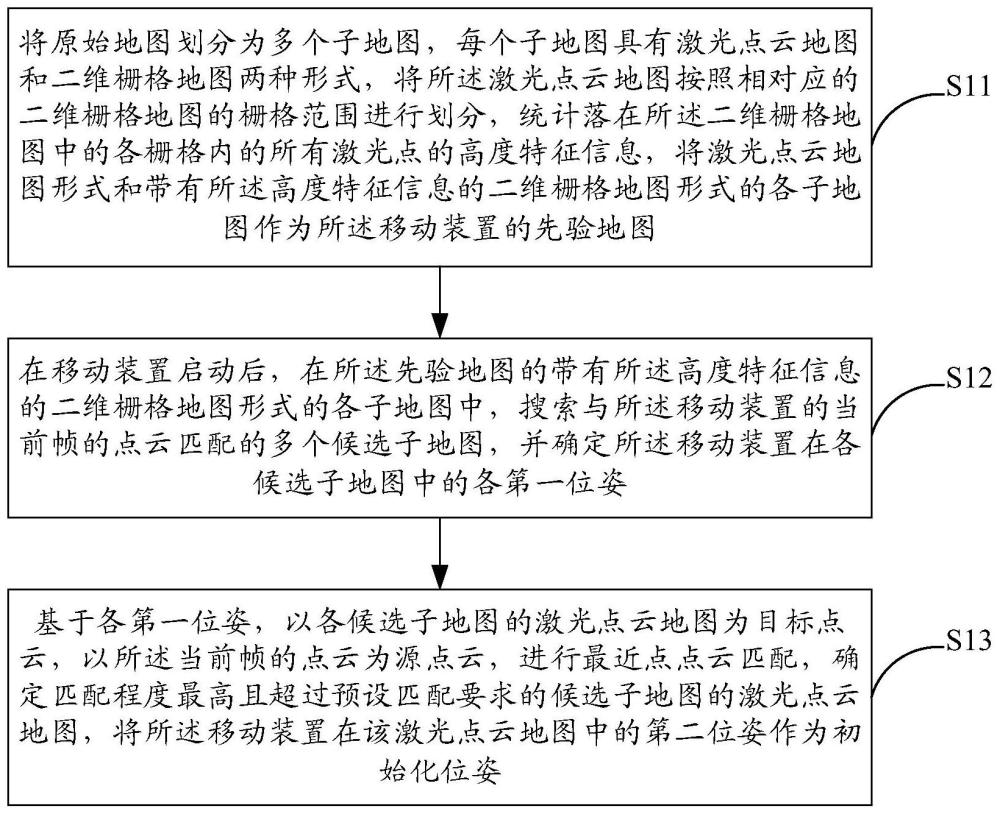
2、将原始地图划分为多个子地图,每个子地图具有激光点云地图和二维栅格地图两种形式,将所述激光点云地图按照相对应的二维栅格地图的栅格范围进行划分,统计落在所述二维栅格地图中的各栅格内的所有激光点的高度特征信息,将激光点云地图形式和带有所述高度特征信息的二维栅格地图形式的各子地图作为所述移动装置的先验地图;
3、在移动装置启动后,在所述先验地图的带有所述高度特征信息的二维栅格地图形式的各子地图中,搜索与所述移动装置的当前帧的点云匹配的多个候选子地图,并确定所述移动装置在各候选子地图中的各第一位姿;
4、基于各第一位姿,以各候选子地图的激光点云地图为目标点云,以所述当前帧的点云为源点云,进行最近点点云匹配,确定匹配程度最高且超过预设匹配要求的候选子地图的激光点云地图,将所述移动装置在该激光点云地图中的第二位姿作为初始化位姿。
5、第二方面,本发明实施例提供一种移动装置的定位初始化执行设备,包括:
6、先验地图生成模块,用于将原始地图划分为多个子地图,每个子地图具有激光点云地图和二维栅格地图两种形式,将所述激光点云地图按照相对应的二维栅格地图的栅格范围进行划分,统计落在所述二维栅格地图中的各栅格内的所有激光点的高度特征信息,将激光点云地图形式和带有所述高度特征信息的二维栅格地图形式的各子地图作为所述移动装置的先验地图;
7、栅格地图匹配模块,用于在移动装置启动后,在所述先验地图的带有所述高度特征信息的二维栅格地图形式的各子地图中,搜索与所述移动装置的当前帧的点云匹配的多个候选子地图,并确定所述移动装置在各候选子地图中的各第一位姿;
8、点云匹配模块,用于基于各第一位姿,以各候选子地图的激光点云地图为目标点云,以所述当前帧的点云为源点云,进行最近点点云匹配,确定匹配程度最高且超过预设匹配要求的候选子地图的激光点云地图,将所述移动装置在该激光点云地图中的第二位姿作为初始化位姿。
9、第三方面,提供一种电子设备,其包括:至少一个处理器,以及与所述至少一个处理器通信连接的存储器,其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行本发明任一实施例的移动装置的定位初始化方法的步骤。
10、第四方面,本发明实施例提供一种移动装置,包括本体和所述本体上安装的本发明任一实施例所述的电子设备。
11、第五方面,本发明实施例提供一种存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现本发明任一实施例的移动装置的定位初始化方法的步骤。
12、第六方面,本发明实施例还提供一种计算机程序产品,当所述计算机程序产品在计算机上运行时,使得所述计算机执行本发明实施例中任意一项所述的移动装置的定位初始化方法。
13、本发明实施例的有益效果在于:构建了栅格地图、点云地图的两种地图格式的先验地图,在先验地图下设计了可在室内外场景下的快速准确的初始化定位算法。由于采用了栅格地图、点云地图的两种地图格式,使得搜索效率得以提高,而且两次匹配前后粗精校验,提高了定位初始化的匹配精度。且无需安装二维码或者利用gps,从而降低了硬件成本,可用性也得以提高。
技术特征:
1.一种移动装置的定位初始化方法,包括:
2.根据权利要求1所述的方法,其特征在于,所述搜索与所述移动装置的当前帧的点云匹配的多个候选子地图包括:
3.根据权利要求2所述的方法,其特征在于,所述在所述先验地图的带有所述高度特征信息的二维栅格地图形式的各子地图中,搜索与所述移动装置的当前帧的点云匹配的多个候选子地图,并确定所述移动装置在各候选子地图中的各第一位姿包括:
4.根据权利要求3所述的方法,其特征在于,所述高度特征信息包括:各栅格内的所有激光点的高度均值和方差。
5.根据权利要求1所述的方法,其特征在于,将所述先验地图存储为点云数据格式,以供所述移动装置的定位初始化调用。
6.一种移动装置的定位初始化执行设备,包括:
7.一种电子设备,包括:至少一个处理器,以及与所述至少一个处理器通信连接的存储器,其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行权利要求1-5中任一项所述方法的步骤。
8.一种移动装置,包括本体以及安装在所述本体上的根据权利要求7所述的电子设备。
9.一种存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现权利要求1-5中任一项所述方法的步骤。
10.一种计算机程序产品,其特征在于,当所述计算机程序产品在计算机上运行时,使得所述计算机执行权利要求1-5中任一项所述的方法。
技术总结
本发明实施例提供一种移动装置的定位初始化方法、设备、移动装置和存储介质。该方法包括:将原始地图划分为多个子地图,每个子地图具有激光点云地图和二维栅格地图两种形式,将激光点云地图形式和二维栅格地图形式的各子地图作为移动装置的先验地图;在先验地图中,搜索与当前帧的点云匹配的多个候选子地图,并确定移动装置在各候选子地图中的各第一位姿;以各候选子地图的激光点云地图为目标点云,以当前帧的点云为源点云,进行最近点点云匹配,将移动装置在该激光点云地图中的第二位姿作为初始化位姿。本发明实施例用了栅格地图、点云地图的两种地图格式,使得搜索效率得以提高,而且两次匹配前后粗精校验,提高了定位初始化的匹配精度。
技术研发人员:何仁杰,彭国旗,张放
受保护的技术使用者:北京智行者科技股份有限公司
技术研发日:
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!