一种用于六分力台架的矢量推力原位校准装置
1.本发明涉及航空发动机测试技术领域,具体是一种用于六分力台架的矢量推力原位校准装置。
背景技术:
2.为了让飞行器获得更高的机动性和敏捷性,越来越多的飞行器采用矢量喷管发动机技术,与普通推力发动机只产生向前推力相比,带可旋转喷管的矢量发动机可通过改变喷管方向,进而改变喷流方向使得发动机额外获得一定的偏转力矩,向前推力和偏转力矩最终合成特定的矢量推力。为了实现对该矢量推力的精确控制,首先需要用六分力台架对发动机矢量推力进行测量,六分力台架一般由定架、动架以及六个测力传感器组成,其中定架与地面固定,动架通过六个测力传感器与定架连接。测量时,通过将六个测力传感器上的读数代入台架的工作公式来计算得到矢量推力。由于六分力台架在制造和使用中,存在着大量干扰精度和准度的系统因素和随机因素,因此必须定期对其进行校准来获得台架当前的工作公式。
3.常用的校准方法是在六个测力传感器的相同位置布置和传感器同向或者反向的六个校准力产生装置,然后让其中单个或者多个力产生装置产生单独校准力或者组合校准力来对台架进行校准,这种校准方法的缺点是:由于这些校准力装置中的液压缸安装在六个传感器同轴的方向,因此多个液压缸组合产生的合力大部分是力螺旋,而发动机产生的瞬时推力大多是力线矢,因此用这种结构校准设备产生的校准力无法准确复现发动机矢量推力对台架的作用效果。
4.为了更好的复现发动机的矢量推力、减少校准力产生装置的数量,因此需要设计一种能实现对六分力台架的矢量力进行原位校准的装置。
技术实现要素:
5.本发明的目的是提供一种用于六分力台架的矢量推力原位校准装置,以解决上述背景技术的问题。
6.本发明的技术方案是:一种用于六分力台架的矢量推力原位校准装置,包括定架、动架、发动机模拟挂架、半球壳体、矢量校准力加载杆和位置调节组件;动架与定架之间通过六个测力传感器连接;发动机模拟挂架与所述动架可拆卸连接,发动机模拟挂架上设有球碗;半球壳体固定在所述定架上,且开口正对球碗设置,半球壳体的内部设有多个球窝;矢量校准力加载杆包括第一球头杆、液压缸、拉压传感器和第二球头杆,第一球头杆的球头端与所述球碗连接,第一球头杆的另一端与所述液压缸连接,液压缸与第二球头杆之间通过拉压传感器连接,第二球头杆的球头端与半球壳体中的一个球窝连接;位置调节组件与第二球头杆连接,用于调节第二球头杆位于半球壳体内球窝的位置。
7.优选的,所述发动机模拟挂架包括连接杆、第一法兰和第二法兰,第一法兰与第二法兰同心设置,且第一法兰与第二法兰之间通过多个连接杆连接,第一法兰的侧壁与第二
法兰的侧壁均通过螺钉与所述动架上设置的纵梁连接。
8.优选的,所述位置调节组件包括导向杠杆、u型调节支座、底座、和u型支撑架;导向杠杆设置在矢量校准力加载杆的下方,导向杠杆的中部设有水平设置的通口;u型调节支座的开口内部架设有水平设置的支撑轴,所述导向杠杆设置在u型调节支座的开口内,且通过通口与支撑轴滑动连接;底座与所述定架上设置的横梁中部固定连接,所述u型调节支座的底部通过连接柱与底座转动连接;u型支撑架固定在导向杠杆靠近第二球头杆的一端,所述第二球头杆卡装在u型支撑架内。
9.优选的,所述第一法兰与第二法兰的中心处均设有螺纹孔,且螺纹孔处连接有螺杆,螺杆的一端穿过第一法兰与第二法兰后与所述球碗固定,所述第一球头杆有多个,且多个第一球头杆的长短不一,每个第一球头杆的杆部均设有外螺纹,所述液压缸正对第一球头杆的缸体上设有内螺纹,第一球头杆的杆部与液压缸螺纹连接。
10.优选的,所述球碗正对第二法兰的侧壁上连接有呈喇叭状的垫环。
11.优选的,所述半球壳体的开口端处固定有第三法兰,第三法兰与所述定架固定。
12.优选的,所述每个球窝都具有独立的编号。
13.与现有技术相比,本发明的有益效果是:
14.1、本发明基于壳体结构具有很好的空间传力性能,能以较小的构件厚度,形成承载能力高,刚度大的承力结构,因此设置半球壳体,并在半球壳体上设有多个球窝,同时本发明通过位置调节组件改变第二球头杆的球头端放置在不同经纬度处的球窝,并让液压缸产生不同大小轴向压力,从而能够模拟矢量推力发动机由矢量喷管偏转产生的来自不同方向且大小不同的矢量推力,第一球头杆推动模拟发动机矢量推力传力路径的模拟挂架,利用发动机模拟挂架使得动架产生不同的俯仰力矩和偏航力矩,这些力和力矩将会被分布在动架上的六个测力传感器测得,因此无需设置多个校准力产生装置,而且能够复现发动机的矢量推力。
15.2、本发明在改变矢量校准力的方向时,通过在半球壳上分布num个球窝,并通过调整液压缸的压力,将压力分成m种不同大小的加载情形,从而能够实现在校准过程中产生的m
×
num个矢量力,并且考虑到发动机的矢量力作用点可能存在的轴向偏移现象,为了模拟该偏移,通过改变矢量校准力加载杆对发动机模拟挂架的作用点,即改变n次球碗的位置,同时每改变一次球碗的位置,就需要遍历测量每个球窝处的m次不同大小的力,因此最多可以实现m
×n×
num种校准加载力。
附图说明
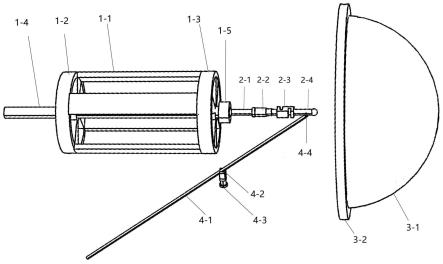
16.图1为本发明的侧视结构示意图;
17.图2为本发明中半球壳体上的球窝示意图;
18.图3为本发明与六分力台架装配后的立体结构示意图;
19.图4为本发明中位置调节组件的结构示意图;
20.图5为本发明中垫环的安装结构示意图。
具体实施方式
21.下面结合附图1到5,对本发明的具体实施方式进行详细描述。在发明的描述中,需
要理解的是,术语“中心”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
22.术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征;在发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
23.实施例1
24.如图1到图5所示,本发明实施例提供一种用于六分力台架的矢量推力原位校准装置,包括定架5-1、动架5-2、发动机模拟挂架、半球壳体3-1、距离调节组件、矢量校准力加载杆和位置调节组件;动架5-2与定架5-1之间通过六个测力传感器5-3连接;发动机模拟挂架与动架5-2可拆卸连接,发动机模拟挂架上设有球碗1-5;半球壳体3-1固定在定架5-1上,且开口正对球碗1-5设置,半球壳体3-1的内部设有多个球窝;矢量校准力加载杆包括第一球头杆2-1、液压缸2-2、拉压传感器2-3和第二球头杆2-4,第一球头杆2-1的球头端与球碗1-5连接,第一球头杆2-1的另一端与液压缸2-2连接,液压缸2-2与第二球头杆2-4之间通过拉压传感器2-3连接,第二球头杆2-4的球头端与半球壳体3-1中的一个球窝连接;位置调节组件与第二球头杆2-4连接,用于调节第二球头杆2-4位于半球壳体3-1内球窝的位置。
25.本发明通过位置调节组件将第二球头杆2-4的球头端放置在不同经纬度处的球窝,并让液压缸2-2产生不同大小轴向压力,从而能够模拟矢量推力发动机来自不同方向且大小不同的矢量推力,第一球头杆2-1推动模拟发动机矢量推力传力路径的模拟挂架,利用发动机模拟挂架使得动架产生不同的俯仰力矩和偏航力矩,这些力和力矩将会被分布在动架上的六个测力传感器测得;其中球窝的数量为num个,球窝的数量num与校准选用的多项式模型所含的参数有关,总体原则是构造的所有矢量力(不同方向,不同大小)的数目不少于模型参数的1.5倍),同时将液压缸2-2的量程分成m(一般m取3或者4)等份,然后分m次将液压缸的压力分段增加到最大量程,因此能够实现在校准过程中产生的m
×
num个矢量力。
26.实施例2
27.本实施例在实施例1的基础上,对发动机模拟挂架的结构进行限定,具体的,如图3所示,为了便于安装和拆卸,因此发动机模拟挂架包括连接杆1-1、第一法兰1-2和第二法兰1-3,第一法兰1-2与第二法兰1-3同心设置,且第一法兰1-2与第二法兰1-3之间通过多个连接杆1-1连接,第一法兰1-2的侧壁与第二法兰1-3的侧壁均通过螺钉与动架5-2上设置的纵梁连接。
28.实施例3
29.本实施例在实施例1的基础上,对位置调节组件的结构进行限定,具体的,如图1到图4所示,位置调节组件包括导向杠杆4-1、u型调节支座4-2、底座4-3、和u型支撑架4-4;导向杠杆4-1设置在矢量校准力加载杆的下方,导向杠杆4-1的中部设有水平设置的通口;u型调节支座4-2的开口内部架设有水平设置的支撑轴,导向杠杆4-1设置在u型调节支座4-2的开口内,且通过通口与支撑轴滑动连接;底座4-3与定架5-1上设置的横梁中部固定连接,u型调节支座4-2的底部通过连接柱与底座4-3转动连接;u型支撑架4-4固定在导向杠杆4-1
2提供预紧力,使得第一球头杆2-1的球体与球碗1-5以及第二球体杆2-4的球体与球窝均紧密接触,最后撤走导向杠杆4-1。
40.测量过程为:将液压缸的量程分成m(一般m取3或者4)等份,然后分m次将液压缸的压力分段增加到最大量程。)然后逐次记录高精度拉压传感器2-3上的读数和六个测力传感器上的读数,液压缸2-2卸载后由导向杠杆4将矢量校准力加载杆托举到另外的球窝位置,类似地测量另外的矢量校准力作用下动架上的六个测力传感器响应。
41.若要改变矢量校准力加载杆对发动机模拟挂架1的作用点,需要改变中心螺杆1-4上的球碗1-5位置,并替换对应长度的第一球头杆2-1,每改变一次球碗的位置,就需要遍历测量每个球窝处的m次不同大小的力,如整个测量过程中改变球碗的位置n次(一般n取2或者3),则整个校准装置在校准过程中产生的所有矢量力的个数最多可为m
×n×
num个。
42.以上公开的仅为本发明的较佳地几个具体实施例,但是,本发明实施例并非局限于此,任何本领域的技术人员能思之的变化都应落入本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1