一种数据采集用的称重设备的制作方法
1.本发明涉及一种称重设备,尤其涉及一种数据采集用的称重设备。
背景技术:
2.在计算机广泛应用的今天,数据采集的重要性是十分显著的,它是计算机与外部物理世界连接的桥梁,数据采集技术广泛应用在各个领域,比如摄像头,麦克风,都是数据采集的工具。
3.专利授权公告号为cn213658065u的专利,公布了一种反向称重用数据采集装置,包括称重主体、显示器一、连接件和数据采集组件;所述数据采集组件包括单片机、显示器二、摄像头、数据接收器、a/d数据转换器以及存储器,所述摄像头通过连接件安装在显示器一上,所述摄像头、数据接收器、a/d数据转换器依次相连,所述a/d数据转换器与单片机相连,所述显示器二与所述单片机相连,所述摄像头将拍摄到显示器一上的称重信息发送给数据接收器,然后由a/d数据转换器转换为数字信息发送给单片机,但上述装置的采集摄像头位置固定,无法移动,从而导致数据采集不全面。
4.因此亟待发明一种能够对采集摄像头进行移动,从而能够全面采集货物数据的数据采集用的称重设备。
技术实现要素:
5.为了克服上述装置的采集摄像头位置固定,无法上下移动,从而导致数据采集不全面的缺点,本发明的目的是提供一种能够对采集摄像头进行升降,从而能够全面采集货物数据的数据采集用的称重设备。
6.本发明通过以下技术途径实现:一种数据采集用的称重设备,包括:底座,底座上部前后对称固接有第一导向杆;第一滑块,第一导向杆上滑动式设置有第一滑块;称重器,两个第一滑块顶部之间固接有称重器;数据采集机构,底座左部设置有用于采集数据的数据采集机构;升降机构,数据采集机构上设置有升降机构,升降机构用于升降数据采集机构。
7.作为上述方案的改进,数据采集机构包括:支架,底座下部前后两侧的左侧均固接有支架;第二导向杆,支架顶部固接有第二导向杆;第二滑块,第二导向杆上滑动式设置有第二滑块;安装环,两个第二滑块之间固接有安装环;采集摄像头,安装环外壁均匀间隔固接有三个采集摄像头。
8.作为上述方案的改进,升降机构包括:齿条,第二导向杆左侧固接有齿条;固定架,第二滑块中部均固接有固定架;电机,固定架内固接有电机;齿轮,电机的输出轴上固接有齿轮,齿轮与齿条啮合。
9.作为上述方案的改进,还包括有固定货物的固定机构,固定机构包括有:第一安装架,称重器下部前后两侧均固接有第一安装架;第三导向杆,第一安装架上下两部的左右两侧均固接有第三导向杆;夹板,相近的前后两个第三导向杆之间均滑动式设置有夹板;第一
弹性件,第三导向杆与夹板之间连接有第一弹性件,第一弹性件套在第三导向杆上。
10.作为上述方案的改进,还包括有用于撑开夹板的撑开机构,撑开机构包括有:第一接触杆,夹板前后两侧均固接有第一接触杆;第二安装架,第二滑块底部固接有第二安装架;挤压件,第二安装架下部左右两侧均固接有挤压件,挤压件中部的上下两侧均为斜面,挤压件向下移动会与第一接触杆接触。
11.作为上述方案的改进,还包括有用于限制夹板位置的限制机构,限制机构包括有:第三安装架,底座右部前后两侧均固接有第三安装架;第一限位块,第三安装架上下两部的左右两侧均固接有第一限位块;固定轴,第三安装架上下两部均固接有固定轴;第二限位块,固定轴上转动式设置有第二限位块,第二限位块与第一限位块接触,第一接触杆向右移动会与第二限位块接触。
12.作为上述方案的改进,还包括有用于限制第一滑块移动的限位机构,限位机构包括有:第二接触杆,两个第一滑块外侧均左右对称固接有第二接触杆;导套,底座上部前后两侧均左右对称固接有导套;滑杆,导套内滑动式设置有滑杆;第三限位块,滑杆顶端固接有第三限位块,第二接触杆卡入第三限位块内;第二弹性件,第三限位块底部与导套顶部之间连接有第二弹性件,第二弹性件套在滑杆上;踏板,左侧的两根滑杆底端之间固接有踏板,右侧的两根滑杆底端之间固接有踏板。
13.作为上述方案的改进,第一弹性件为压缩弹簧。
14.采用了上述对本发明结构的描述可知,本发明的设计出发点、理念及优点是:1、通过开启采集摄像头和电机,电机的输出轴带动齿轮转动,从而能够使安装环带动采集摄像头向下移动,进而实现了能够对采集摄像头进行移动的功能,从而能够使数据采集更加全面。
15.2、通过向外拉动夹板,第一弹性件随之被压缩,然后通过将货物放置在称重器上,再松开夹板,第一弹性件复位带动夹板向内移动,从而将货物夹紧,达到了移动货物时,防止货物从称重器掉落的目的。
16.3、通过第二接触杆移动能够挤压第三限位块向下移动,第二弹性件随之被压缩,当第二接触杆与第三限位块脱离时,第二弹性件能够带动第三限位块向上移动将第二接触杆卡紧,从而防止货物在进行数据采集的时候发生移动。
附图说明
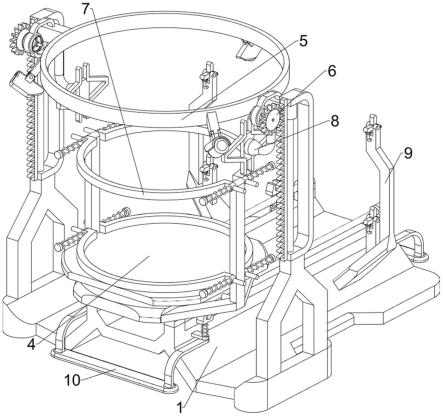
17.图1为本发明的立体结构示意图。
18.图2为本发明的部分立体结构示意图。
19.图3为本发明数据采集机构的部分立体结构示意图。
20.图4为本发明升降机构的部分立体结构示意图。
21.图5为本发明固定机构的部分立体结构示意图。
22.图6为本发明撑开机构的部分立体结构示意图。
23.图7为本发明限制机构的部分立体结构示意图。
24.图8为本发明限位机构的部分立体结构示意图。
25.图中标号名称:1-底座,2-第一导向杆,3-第一滑块,4-称重器,5-数据采集机构,501-支架,502-第二导向杆,503-第二滑块,504-安装环,505-采集摄像头,6-升降机构,
601-齿条,602-固定架,603-电机,604-齿轮,7-固定机构,701-第一安装架,702-第三导向杆,703-夹板,704-第一弹性件,8-撑开机构,801-第一接触杆,802-第二安装架,803-挤压件,9-限制机构,901-第三安装架,902-第一限位块,903-固定轴,904-第二限位块,10-限位机构,1001-第二接触杆,1002-导套,1003-滑杆,1004-第三限位块,1005-第二弹性件,1006-踏板。
具体实施方式
26.下面结合具体实施例对技术方案做进一步的说明,需要注意的是:本文中所说的上、下、左、右等指示方位的字词仅是针对所示结构在对应附图中位置而言。本文中为零部件所编序号本身,例如:第一、第二等,仅用于区分所描述的对象,不具有任何顺序或技术含义。而本技术所说如:连接、联接,如无特别说明,均包括直接和间接连接(联接)。
27.实施例1
28.一种数据采集用的称重设备,参阅图1-图4所示,包括有底座1、第一导向杆2、第一滑块3、称重器4、数据采集机构5和升降机构6,底座1上部前后对称通过焊接的方式设置有第一导向杆2,第一导向杆2上滑动式设置有第一滑块3,两个第一滑块3顶部之间固接有称重器4,底座1左部设置有用于数据采集机构5,数据采集机构5上设置有升降机构6。
29.参阅图1和图3所示,数据采集机构5包括有支架501、第二导向杆502、第二滑块503、安装环504和采集摄像头505,底座1下部前后两侧的左侧均固接有支架501,支架501顶部固接有第二导向杆502,第二导向杆502上滑动式设置有第二滑块503,两个第二滑块503之间固接有安装环504,安装环504外壁均匀间隔通过螺栓连接的方式设置有三个采集摄像头505。
30.参阅图1和图4所示,升降机构6包括有齿条601、固定架602、电机603和齿轮604,第二导向杆502左侧固接有齿条601,第二滑块503中部均固接有固定架602,固定架602内固接有电机603,电机603的输出轴上固接有齿轮604,齿轮604与齿条601啮合。
31.初始时,第一滑块3和称重器4位于第一导向杆2右部,当要进行数据采集时,工作人员将本设备与电脑连接,随后工作人员将货物放置于称重器4上,工作人员开启称重器4对货物进行称重,货物的重量能够在电脑上显示,与此同时工作人员向左推动称重器4,称重器4带动货物和第一滑块3向左移动,当货物位于安装环504下方后,随后工作人员开启采集摄像头505和电机603,电机603的输出轴带动齿轮604转动,齿轮604转动从而带动电机603和固定架602向下移动,固定架602带动第二滑块503和安装环504向下移动,安装环504带动采集摄像头505向下移动,使得采集摄像头505对货物进行数据采集,当数据采集完成后,工作人员控制电机603的输出轴反转,电机603的输出轴带动齿轮604反转,使得固定架602带动第二滑块503和安装环504向上移动,安装环504带动采集摄像头505向上移动复位,随后工作人员将电机603关闭,然后工作人员将称重器4向右移动复位,然后工作人员将称重器4上的货物取出,重复上述操作,能够再次对货物进行数据采集,当不需要使用本设备后,工作人员将称重器4和采集摄像头505关闭即可。
32.实施例2
33.在实施例1的基础之上,参阅图1和图5所示,还包括有固定机构7,固定机构7包括第一安装架701、第三导向杆702、夹板703和第一弹性件704,称重器4下部前后两侧均固接
有第一安装架701,第一安装架701上下两部的左右两侧均通过焊接的方式设置有第三导向杆702,相近的前后两个第三导向杆702之间均滑动式设置有夹板703,第三导向杆702与夹板703之间连接有第一弹性件704,第一弹性件704套在第三导向杆702上,第一弹性件704为压缩弹簧,能够更好地带动夹板703移动复位。
34.参阅图1和图6所示,还包括有撑开机构8,撑开机构8包括第一接触杆801、第二安装架802和挤压件803,夹板703前后两侧均固接有第一接触杆801,第二滑块503底部固接有第二安装架802,第二安装架802下部左右两侧均固接有挤压件803,挤压件803中部的上下两侧均为斜面,挤压件803向下移动会与第一接触杆801接触。
35.当要将货物放置到称重器4上时,工作人员将左右两侧的夹板703向外拉动,第一弹性件704随之被压缩,然后工作人员将货物放置在称重器4上,再松开夹板703,第一弹性件704复位带动夹板703向内移动,从而将货物夹紧,防止移动货物时货物从称重器4掉落,当第二滑块503向下移动时,第二滑块503带动安装环504和第二安装架802向下移动,安装环504带动采集摄像头505向下移动对货物进行数据采集,第二安装架802带动挤压件803向下移动,当挤压件803向下移动与上部的第一接触杆801接触时,挤压件803中部下侧的斜面挤压第一接触杆801向外移动,第一接触杆801带动夹板703向外移动,第一弹性件704随之被压缩,夹板703向外移动与货物脱离接触,能够使采集摄像头505对货物采集数据更加全面,当挤压件803中部上侧的斜面与第一接触杆801接触时,第一弹性件704复位随之带动夹板703向内移动复位,从而使夹板703重新将货物上部夹紧,当挤压件803向下移动与下部的第一接触杆801接触时,能够使下部的夹板703与货物脱离,第一弹性件704随之发生形变,采集摄像头505能够对货物下部进行数据采集,当挤压件803向上移动与下部的第一接触杆801脱离时,能够第一弹性件704带动夹板703向内移动复位,从而使货物被重新固定,当挤压件803向上移动与上部的第一接触杆801接触时,挤压件803上部的斜面挤压第一接触杆801向外移动,当挤压件803与上部的第一接触杆801脱离接触后,第一弹性件704带动夹板703向内移动复位,如此通过挤压件803与第一接触杆801配合,从而能够使夹板703与货物脱离,进而能够使采集摄像头505更好的对货物进行信息采集。
36.参阅图1和图7所示,还包括有限制机构9,限制机构9包括第三安装架901、第一限位块902、固定轴903和第二限位块904,底座1右部前后两侧均固接有第三安装架901,第三安装架901上下两部的左右两侧均固接有第一限位块902,第三安装架901上下两部均通过焊接的方式设置有固定轴903,固定轴903上转动式设置有第二限位块904,第二限位块904与第一限位块902接触,第一接触杆801向右移动会与第二限位块904接触。
37.参阅图1和图8所示,还包括有限位机构10,限位机构10包括第二接触杆1001、导套1002、滑杆1003、第三限位块1004、第二弹性件1005和踏板1006,两个第一滑块3外侧均左右对称固接有第二接触杆1001,底座1上部前后两侧均左右对称固接有导套1002,导套1002内滑动式设置有滑杆1003,滑杆1003顶端固接有第三限位块1004,第二接触杆1001卡入第三限位块1004内,第三限位块1004底部与导套1002顶部之间连接有第二弹性件1005,第二弹性件1005套在滑杆1003上,左侧的两根滑杆1003底端之间通过焊接的方式设置有踏板1006,右侧的两根滑杆1003底端之间固接有踏板1006。
38.初始时,右侧的第二接触杆1001卡在右侧的第三限位块1004内,第二限位块904与右侧的第一限位块902顶部接触,左侧的第一接触杆801与第二限位块904接触,使得左侧的
第一弹性件704处于压缩状态,当要进行信息采集使,工作人员先将货物放置于称重器4上,随后工作人员将右侧的踏板1006向下踩,右侧的踏板1006带动滑杆1003和第三限位块1004向下移动,第二弹性件1005随之被压缩,第三限位块1004向下移动与第二接触杆1001脱离接触,随后工作人员向左推动称重器4,称重器4带动第一滑块3向左移动,从而使左侧的第一接触杆801逐渐与第二限位块904脱离接触,左侧的第一弹性件704复位带动左侧的夹板703向右移动复位,从而使两个夹板703将货物夹紧,当右侧的第一接触杆801与第二限位块904接触时,右侧的第一接触杆801带动第二限位块904向左转动,从而使第二限位块904与左侧的第一限位块902顶部接触,当第一滑块3带动左侧的第二接触杆1001向左移动与第三限位块1004接触时,第二接触杆1001挤压第三限位块1004向下移动,第三限位块1004带动滑杆1003和踏板1006向下移动,第二弹性件1005随之被压缩,当第二接触杆1001与第三限位块1004脱离时,第二弹性件1005带动滑杆1003、第三限位块1004和踏板1006向上移动复位,使得第二接触杆1001被卡入第三限位块1004,从而能够防止货物在进行数据采集的时候发生移动,造成信息采集不准确,当货物信息采集完成后,工作人员将左侧的踏板1006向下踩,踏板1006通过滑杆1003带动第三限位块1004向下移动,从而使第二弹性件1005被压缩,进而使第三限位块1004与第二接触杆1001脱离接触,随后工作人员将称重器4向右移动,同时工作人员松开踏板1006,从而使第二弹性件1005复位带动踏板1006、滑杆1003和第三限位块1004向上移动复位,称重器4向右移动带动第一滑块3向右移动,当右侧的第一接触杆801与第二限位块904接触时,右侧的第一接触杆801带动第二限位块904向右转动,使得第二限位块904与左侧的第一限位块902脱离接触,第二限位块904与右侧的第一限位块902接触,当左侧的第一接触杆801与第二限位块904接触时,左侧的第一接触杆801被挤压向左移动,左侧的第一接触杆801带动左侧的夹板703向左移动,从而使货物不被固定,便于工作人员将货物进行取出,与此同时右侧的第一接触杆801已卡入右侧的第三限位块1004内,从而使称重器4不轻易发生移动。
39.应当理解,以上的描述仅仅用于示例性目的,并不意味着限制本发明。本领域的技术人员将会理解,本发明的变型形式将包含在本文的权利要求的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1