速度模型的确定方法、装置、设备和存储介质与流程
本技术涉及地震数据,特别涉及一种速度模型的确定方法、装置、设备和存储介质。
背景技术:
1、速度模型是处理地震数据的一项重要数据,速度模型的准确度是直接影响地震数据处理结果的重要因素。
2、当前,在建立了初始速度模型后,通常会使用层析反演方法来对初始速度模型中的初始速度值进行调整,得到更为准确的速度模型。
3、但上述方法得到的速度模型的准确度仍然较低。
技术实现思路
1、本技术实施例提供了一种速度模型的确定方法,能够解决现有技术中速度模型的准确度较低的问题。
2、第一方面,提供了一种速度模型的确定方法,所述方法包括:
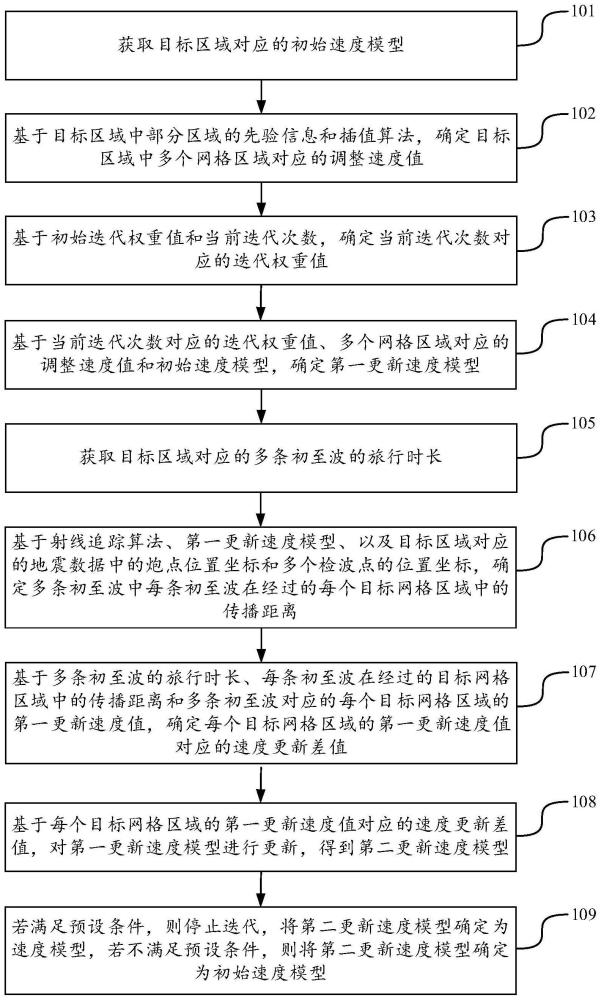
3、获取目标区域对应的初始速度模型,其中,所述初始速度模型包括多个具有不同位置坐标的数据道,每个数据道包括至少一个对应不同深度的网格区域和每个网格区域对应的初始速度值;
4、基于所述目标区域中部分区域的先验信息和插值算法,确定所述目标区域中多个网格区域对应的调整速度值;
5、基于初始迭代权重值和当前迭代次数,确定所述当前迭代次数对应的迭代权重值,其中,所述初始迭代权重值是第一次迭代对应的迭代权重值,所述当前迭代次数对应的迭代权重值与所述当前迭代次数成负相关;
6、基于所述当前迭代次数对应的迭代权重值、所述多个网格区域对应的调整速度值和所述初始速度模型,确定第一更新速度模型,其中,所述第一更新速度模型包括所述多个网格区域的初始速度值对应的第一更新速度值;
7、获取所述目标区域对应的多条初至波的旅行时长,其中,所述多条初至波的旅行时长是通过所述目标区域对应的地震数据获取的;
8、基于射线追踪算法、所述第一更新速度模型、以及所述目标区域对应的地震数据中的炮点位置坐标和多个检波点的位置坐标,确定所述多条初至波中每条初至波在经过的每个目标网格区域中的传播距离;
9、基于所述多条初至波的旅行时长、所述每条初至波在经过的目标网格区域中的传播距离和所述多条初至波对应的每个目标网格区域的第一更新速度值,确定所述每个目标网格区域的第一更新速度值对应的速度更新差值;
10、基于所述每个目标网格区域的第一更新速度值对应的速度更新差值,对所述第一更新速度模型进行更新,得到第二更新速度模型,其中,所述第二更新速度模型包括所述多个网格区域的第一更新速度值对应的第二更新速度值;
11、若满足预设条件,则停止迭代,将所述第二更新速度模型确定为速度模型,若不满足预设条件,则将所述第二更新速度模型确定为初始速度模型。
12、在一种可能的实现方式中,所述部分区域的先验信息包括所述部分区域中每个测井对应的层位信息和每个层位对应的实际速度值,其中,所述测井对应的层位信息包括所述测井对应的至少一个层位的深度;
13、所述基于所述目标区域中部分区域的先验信息和插值算法,确定所述目标区域中多个网格区域对应的调整速度值,包括:
14、确定每个测井对应的数据道包括的至少一个测井网格区域;
15、基于每个测井对应的层位信息和每个测井网格区域对应的深度,确定每个测井网格区域所属的层位;
16、对于所述每个测井对应的每个测井网格区域,将所述测井网格区域所属的层位对应的实际速度值确定为所述测井网格区域对应的调整速度值;
17、基于每个测井网格区域对应的调整速度值和所述插值算法,确定所述目标区域中除所述测井网格区域之外的其他网格区域对应的调整速度值。
18、在一种可能的实现方式中,所述基于初始迭代权重值和当前迭代次数,确定所述当前迭代次数对应的迭代权重值,包括:
19、基于下述公式计算所述当前迭代次数对应的迭代权重值:
20、mi-m1=b*(i-1)
21、其中,所述i是当前迭代次数,所述mi是当前迭代次数对应的迭代权重值,所述m1是初始迭代权重值,所述b是预设正值。
22、在一种可能的实现方式中,所述基于所述当前迭代次数对应的迭代权重值、所述多个网格区域对应的调整速度值和所述初始速度模型,确定第一更新速度模型,包括:
23、对于确定出对应的调整速度值的多个网格区域,基于下述公式计算所述网格区域对应的第一更新速度值:
24、
25、其中,所述i是当前迭代次数,所述j是网格区域的序号,所述是第j个网格区域对应的第一更新速度值,所述mi是当前迭代次数对应的迭代权重值,所述vtj是第j个网格区域对应的调整速度值,所述v0j是第j个网格区域对应的初始速度值;
26、对于未确定出对应的调整速度值的多个网格区域,将所述网格区域对应的初始速度值确定为所述网格区域对应的第一更新速度值。
27、在一种可能的实现方式中,所述基于所述当前迭代次数对应的迭代权重值、所述多个网格区域对应的调整速度值和所述初始速度模型,确定第一更新速度模型,包括:
28、基于所述部分区域的先验信息和先验权重值,对所述初始速度模型进行局部调整,得到所述初始速度模型对应的局部调整速度模型;
29、基于所述当前迭代次数对应的迭代权重值和所述多个网格区域对应的调整速度值,对所述局部调整速度模型进行全局调整,得到所述第一更新速度模型。
30、在一种可能的实现方式中,所述基于所述多条初至波的旅行时长、所述每条初至波在经过的目标网格区域中的传播距离和所述多条初至波对应的每个目标网格区域的第一更新速度值,确定所述每个目标网格区域的第一更新速度值对应的速度更新差值,包括:
31、对于所述每条初至波,基于所述初至波在经过的每个目标网格区域中的传播距离和所述初至波对应的每个目标网格区域的第一更新速度值,确定所述初至波在经过的每个目标网格区域中的参考传播时长;
32、计算所述初至波在经过的每个目标网格区域中的参考传播时长之和,作为所述初至波的参考传播总时长;
33、基于所述初至波的参考传播总时长和所述初至波的旅行时长,确定所述初至波在经过的每个目标网格区域中的传播时长更新差值;
34、基于所述初至波在经过的每个目标网格区域中的传播时长更新差值和所述初至波在经过的每个目标网格区域中的传播距离,确定所述每个目标网格区域的调整速度值对应的速度更新差值。
35、第二方面,提供了一种速度模型的确定装置,所述装置包括:
36、建立模块,用于获取目标区域对应的初始速度模型,其中,所述初始速度模型包括多个具有不同位置坐标的数据道,每个数据道包括至少一个对应不同深度的网格区域和每个网格区域对应的初始速度值;
37、第一确定模块,用于基于所述目标区域中部分区域的先验信息和插值算法,确定所述目标区域中多个网格区域对应的调整速度值;
38、第二确定模块,用于基于初始迭代权重值和当前迭代次数,确定所述当前迭代次数对应的迭代权重值,其中,所述初始迭代权重值是第一次迭代对应的迭代权重值,所述当前迭代次数对应的迭代权重值与所述当前迭代次数成负相关;
39、第三确定模块,用于基于所述当前迭代次数对应的迭代权重值、所述多个网格区域对应的调整速度值和所述初始速度模型,确定第一更新速度模型,其中,所述第一更新速度模型包括所述多个网格区域的初始速度值对应的第一更新速度值;
40、获取模块,用于获取所述目标区域对应的多条初至波的旅行时长,其中,所述多条初至波的旅行时长是通过所述目标区域对应的地震数据获取的;
41、第四确定模块,用于基于射线追踪算法、所述第一更新速度模型、以及所述目标区域对应的地震数据中的炮点位置坐标和多个检波点的位置坐标,确定所述多条初至波中每条初至波在经过的每个目标网格区域中的传播距离;
42、第五确定模块,用于基于所述多条初至波的旅行时长、所述每条初至波在经过的目标网格区域中的传播距离和所述多条初至波对应的每个目标网格区域的第一更新速度值,确定所述每个目标网格区域的第一更新速度值对应的速度更新差值;
43、更新模块,用于基于所述每个目标网格区域的第一更新速度值对应的速度更新差值,对所述第一更新速度模型进行更新,得到第二更新速度模型,其中,所述第二更新速度模型包括所述多个网格区域的第一更新速度值对应的第二更新速度值;
44、判断模块,用于若满足预设条件,则停止迭代,将所述第二更新速度模型确定为速度模型,若不满足预设条件,则将所述第二更新速度模型确定为初始速度模型。
45、在一种可能的实现方式中,所述部分区域的先验信息包括所述部分区域中每个测井对应的层位信息和每个层位对应的实际速度值,其中,所述测井对应的层位信息包括所述测井对应的至少一个层位的深度;
46、所述第一确定模块,用于:
47、确定每个测井对应的数据道包括的至少一个测井网格区域;
48、基于每个测井对应的层位信息和每个测井网格区域对应的深度,确定每个测井网格区域所属的层位;
49、对于所述每个测井对应的每个测井网格区域,将所述测井网格区域所属的层位对应的实际速度值确定为所述测井网格区域对应的调整速度值;
50、基于每个测井网格区域对应的调整速度值和所述插值算法,确定所述目标区域中除所述测井网格区域之外的其他网格区域对应的调整速度值。
51、在一种可能的实现方式中,所述第二确定模块,用于:
52、基于下述公式计算所述当前迭代次数对应的迭代权重值:
53、mi-m1=b*(i-1)
54、其中,所述i是当前迭代次数,所述mi是当前迭代次数对应的迭代权重值,所述m1是初始迭代权重值,所述b是预设正值。
55、在一种可能的实现方式中,所述第三确定模块,用于:
56、对于确定出对应的调整速度值的多个网格区域,基于下述公式计算所述网格区域对应的第一更新速度值:
57、
58、其中,所述i是当前迭代次数,所述j是网格区域的序号,所述是第j个网格区域对应的第一更新速度值,所述mi是当前迭代次数对应的迭代权重值,所述vtj是第j个网格区域对应的调整速度值,所述v0j是第j个网格区域对应的初始速度值;
59、对于未确定出对应的调整速度值的多个网格区域,将所述网格区域对应的初始速度值确定为所述网格区域对应的第一更新速度值。
60、在一种可能的实现方式中,所述第三确定模块,用于:
61、基于所述部分区域的先验信息和先验权重值,对所述初始速度模型进行局部调整,得到所述初始速度模型对应的局部调整速度模型;
62、基于所述当前迭代次数对应的迭代权重值和所述多个网格区域对应的调整速度值,对所述局部调整速度模型进行全局调整,得到所述第一更新速度模型。
63、在一种可能的实现方式中,所述第五确定模块,用于:
64、对于所述每条初至波,基于所述初至波在经过的每个目标网格区域中的传播距离和所述初至波对应的每个目标网格区域的第一更新速度值,确定所述初至波在经过的每个目标网格区域中的参考传播时长;
65、计算所述初至波在经过的每个目标网格区域中的参考传播时长之和,作为所述初至波的参考传播总时长;
66、基于所述初至波的参考传播总时长和所述初至波的旅行时长,确定所述初至波在经过的每个目标网格区域中的传播时长更新差值;
67、基于所述初至波在经过的每个目标网格区域中的传播时长更新差值和所述初至波在经过的每个目标网格区域中的传播距离,确定所述每个目标网格区域的调整速度值对应的速度更新差值。
68、第三方面,提供了一种计算机设备,所述计算机设备包括处理器和存储器,存储器中存储有至少一条指令,指令由处理器加载并执行以实现速度模型的确定方法所执行的操作。
69、第四方面,提供了一种计算机可读存储介质,存储介质中存储有至少一条指令,指令由处理器加载并执行以实现速度模型的确定方法所执行的操作。
70、本技术实施例提供的技术方案带来的有益效果是:本技术实施例中提到的方案,可以先基于部分区域的先验信息和插值算法,确定出目标区域中多个网格区域对应的调整速度值,基于当前迭代次数对应的迭代权重值、多个网格区域对应的调整速度值和初始速度值模型,确定出第一更新速度模型,再获取目标区域对应的多条初至波的旅行时长,并基于射线追踪算法、第一更新速度模型、以及目标区域对应的地震数据中的炮点位置坐标和多个检波点的位置坐标,确定出每条初至波在第一更新速度模型中经过的目标网格区域中的传播距离,然后基于初至波的旅行时长、每条初至波在经过的目标网格区域中的传播距离和这多条初至波对应的每个目标网格区域的第一更新速度值,确定出每个目标网格区域的第一更新速度值对应的调整速度差值,然后基于调整速度差值对第一更新速度模型进行更新,得到第二更新速度模型,此时,可判断当前是否满足预设条件,若满足预设条件,则将得到的第二更新速度模型确定为速度模型,若不满足预设条件,则将得到的第二更新速度模型确定为初始速度模型,再进行下一次的迭代。采用本技术,由于使用先验信息对初始速度模型中的初始速度值进行了调整,得到了更为准确的第一更新速度模型,因此,在每一次迭代更新后,均可以得到更为准确的第一更新速度模型,这样,使得最终得到的速度模型更为准确。
- 还没有人留言评论。精彩留言会获得点赞!