信号传输方法及装置、信号处理方法及装置以及雷达系统与流程
信号传输方法及装置、信号处理方法及装置以及雷达系统
1.本技术是分案申请,原申请的申请号是201980059673.5,原申请日是2019年8月19日,原申请的全部内容通过引用结合在本技术中。
技术领域
2.本技术涉及传感器技术领域,尤其涉及一种信号传输方法及装置、信号处理方法及装置以及雷达系统。
背景技术:
3.车载雷达是自动驾驶系统中必不可少的传感器,通过车载雷达可以为车辆提供障碍物(也可以称为目标)检测。具体地,可以对车辆周围障碍物的距离、速度和方位角进行检测。
4.近年来,车载雷达技术不断演进,例如频段从24ghz逐渐演进到77ghz/79ghz,从而通过更大的扫描带宽获得更高的距离分辨率;通道数由单发射多接收(single input multiple output,simo)的模式,演进到多发射多接收(multiple input multiple output,mimo)的模式,从而扩大虚拟天线口径,提高角度分辨率。
5.mimo雷达中,多个天线可以采用时分复用(time division multiplexing,tdm)的方式发送啁啾(chirp)信号。虽然采用mimo雷达可以提高角度分辨率,但是mimo雷达存在最大测速范围下降的问题。通常,雷达的最大测速范围可以表示为vmax=λ/4*tc,其中λ为调制频率的波长,tc为同一根天线重复发送的周期。假设单个天线发送一个chirp的持续时间为tc_simo(可以称为一个时隙)。那么,tdm mimo雷达中,nt个天线采用tdm方式发送nt个chirp信号时,需要的时间tc_mimo满足:tc_mimo≥nt*tc_simo。因此,采用nt个天线发送chirp时的最大测速范围vmax_mimo和采用单个天线发送chirp时的最大测速范围vmax_simo(即simo雷达的测速范围)的关系可以表示为:vmax_simo≥nt*vmax_mimo。通过上述公式可以看出,mimo雷达中,由于发射天线的数目增多,导致最大测速范围与simo雷达相比下降。而且发射天线的数量nt越多,最大测速范围下降的问题越严重。在最大测速范围下降的情况下,在计算目标的速度时更易发生速度混叠的情况。此外,由于tdm mimo雷达中速度和角度的测量耦合,使得速度的混叠影响角度的求解,达不到预期的提高角度分辨率的目的。
6.综上,亟需一种mimo雷达的信号传输及处理的方案,使得mimo雷达能够准确将目标的速度恢复到simo雷达的测速范围。
技术实现要素:
7.本技术实施例提供了一种信号传输方法及装置、信号处理方法及装置以及雷达系统,使得mimo雷达能够准确地将目标的速度恢复到simo雷达的测速范围。
8.第一方面,本技术实施例提供一种信号传输方法,该方法应用于多输入多输出mimo雷达,mimo雷达包括发射器,发射器包括nt个发射天线,该方法包括:发射器发送测量帧,测量帧用于测量目标的速度,测量帧包括第一突发;其中,在第一突发中,nt个发射天线
中的每个发射天线用于以n1*t1为周期发送啁啾chirp信号,其中n1》nt,t1为第一突发中每个chirp信号的持续时间。
9.其中,测量帧可以为调频连续波fmcw。
10.采用上述方案,可以实现发射天线的不同密度的发送。
11.若高密度发射天线(例如可以是第一发射天线)在发送n1-nt个chirp信号时是连续发送的,软overlapping时刻对应的接收天线的相位差别仅由目标速度引起的多普勒(doppler)相位确定。因此,可以通过发射密度较大的第一发射天线上计算出的目标的速度标识直接匹配出对应的速度混叠系数,从而确定目标的速度。
12.若高密度发射天线(例如可以是第一发射天线)在发送n1-nt个chirp信号时是周期性发送的,由于高密度发射天线对应的接收的回波信号的最大测速范围大,因而高密度发射天线发送时可以形成更小的发射重复周期,那么采用谱峰搜索方法时,高密度发射天线对应的接收的回波信号相对simo的速度混叠系数的数量少,利用高密度的发射天线对应的接收的回波信号辅助低密度发射天线对应的接收的回波信号进行目标速度的计算,可以缩小角度谱峰搜索中混叠系数的区间范围,降低计算复杂度。
13.因此,采用第一方面提供的信号传输方法,可以将mimo雷达的最大测速范围恢复到simo测速范围,不影响后续的角度测量。实际应用中,在计算出目标的速度之后,还需要根据补偿多普勒后的各接收通道上的数据进一步计算,以获取目标的方位角(例如包括水平方位角和垂直方位角),从而对获得目标的距离、速度、角度信息。因此,速度计算的准确性对方位角计算的影响较大。采用本技术实施例提供的方法可以保证方位角计算的准确性,提高角度分辨率。
14.在一种可能的设计中,在第一突发中,nt个发射天线中的第一发射天线还用于以m1*t1为周期发送chirp信号,其中m1<n1。采用如上方式发送chirp信号,可以实现发射天线的不同密度的发送,其中第一发射天线的发送密度较大,其余发射天线的发送密度较小。由于高密度发射天线对应接收的回波信号的最大测速范围大,因而高密度发射天线发送时可以形成更小的发射重复周期,那么采用谱峰搜索方法时,高密度发射天线对应的接收的回波信号相对simo的速度混叠系数的数量少,利用高密度的发射天线对应的接收的回波信号辅助低密度发射天线对应的接收的回波信号进行目标速度的计算,可以缩小角度谱峰搜索中混叠系数的区间范围,降低计算的复杂度。
15.在一种可能的设计中,在第一突发中,第一发射天线还用于以m2*t1为周期发送chirp信号,m2<n1,m1和m2互质。在上述方案中,根据第一发射天线高密度发送的两组chirp信号反射后的回波信号确定的两组标识的速度分辨率相同。由于m1和m2互质,而在参差算法中,两两互质的任意整数方程有解,因此采用上述方案可以利用中国余数法(参差算法)扩大mimo雷达的测速范围。
16.此外,可选地,测量帧中还可以包括第二突发;在第二突发中,nt个发射天线中的每个发射天线用于以n2*t2为周期发送chirp信号,nt个发射天线中的第二发射天线还用于以m3*t2发送chirp信号,m3<n2,t2为第二突发中每个chirp信号的持续时间;m3*t2和m1*t1互质,或者m3和m1互质且t1和t2相等。采用上述方案,根据第一发射天线高密度发送的chirp信号发射后的回波信号以及根据第二发射天线高密度发送的chirp信号发射后的回波信号分别确定的两组标识的速度分辨率相同,由于m3*t2和m1*t1互质,或者m3和m1互质,
而在参差算法中,两两互质的任意整数方程有解,因此采用上述方案可以利用中国余数法(参差算法)扩大mimo雷达的测速范围。
17.此外,可选地,测量帧中还可以包括第三突发;在第三突发中,nt个发射天线中的每个发射天线用于以n3*t3为周期发送chirp信号,t3为第三突发中每个chirp信号的持续时间;n3*t3和m1*t1互质,或者n3和m1互质且t1和t3相等。由于n3*t3和m1*t1互质,或者n3和m1互质,而在参差算法中,两两互质的任意整数方程有解,因此采用上述方案可以利用中国余数法(参差算法)扩大mimo雷达的测速范围。
18.在一种可能的设计中,nt个发射天线中存在至少一个发射天线在第一突发中连续发送两个chirp信号。采用上述实现方式,软重叠阵子时刻两个或者多个相邻时隙对应的接收天线的相位差别仅由目标速度引起的多普勒(doppler)相位确定。因此,可以通过发射密度较大的第一发射天线上计算出的目标的速度标识直接匹配出对应的速度混叠系数,从而确定目标的simo测速范围内的混叠速度。
19.在一种可能的设计中,该mimo雷达还包括处理单元,该方法还包括:处理单元根据确定测量帧的配置,并通过接口将测量帧的配置发送至单片微波集成电路mmic,mmic用于根据测量帧的配置使能发射器发送测量帧。采用上述方案,可以为mmic配置相关参数,从而完成测量帧的发送。
20.第二方面,本技术实施例提供一种信号处理方法,该方法应用于mimo雷达,mimo雷达包括发射器、接收器和处理单元,发射器包括nt个发射天线,该方法包括如下步骤:接收器接收发射器发送的测量帧经一个或多个目标反射后形成的第一回波信号和第二回波信号,该测量帧包括第一突发,第一回波信号由nt个发射天线中的每个发射天线在第一突发中以n1*t1为周期发送的chirp信号经一个或多个目标反射后形成,第二回波信号由nt个发射天线中的第一发射天线发送的其他chirp信号经一个或多个目标反射后形成,n1》nt,t1为第一突发中每个chirp信号的持续时间;处理单元根据第一回波信号和第二回波信号确定一个或多个目标的速度。
21.采用上述方案,发射天线采用不同密度发送,因而根据不同发送密度的发射天线发送的chirp信号得到的第一回波信号和第二回波信号的最大测速范围不同。
22.若第一发射天线在发送n1-nt个chirp信号时是连续发送的,软overlapping时刻对应的接收天线的相位差别仅由目标速度引起的多普勒(doppler)相位确定。因此,可以通过发射密度较大的发射天线上计算出的目标的速度标识,直接匹配出对应的速度混叠系数,从而将mimo雷达的最大测速范围恢复到simo测速范围,确定目标的速度。
23.若第一发射天线在发送n1-nt个chirp信号时是周期性发送的,由于高密度发射天线对应的接收的回波信号的最大测速范围大,因而高密度发射天线发送时可以形成更小的发射重复周期,那么采用谱峰搜索方法时,高密度发射天线对应的接收的回波信号相对simo的速度混叠系数的数量少,利用高密度的发射天线对应的接收的回波信号辅助低密度发射天线对应的接收的回波信号进行目标速度的计算,可以缩小角度谱峰搜索中混叠系数的区间范围,降低计算复杂度。
24.在一种可能的设计中,处理单元根据接收器接收到的回波信号确定一个或多个目标的速度,包括:处理单元根据第一回波信号确定第一标识,第一标识用于指示一个或多个目标的距离测量值和速度测量值;处理单元根据第二回波信号确定第二标识,第二标识用
于指示所述一个或多个目标的距离测量值和速度测量值;处理单元根据第一标识和第二标识确定一个或多个目标的速度。采用上述方案,可以根据两组目标标识(即第一标识和第二标识)确定目标的速度混叠系数,进而确定目标的速度。
25.在一种可能的设计中,第二回波信号由第一发射天线以m1*t1为周期发送的chirp信号经一个或多个目标反射后形成,m1<n1。采用上述方案,可以通过第一发射天线周期性发送chirp信号实现高密度发送。
26.进一步地,处理单元根据第一标识和第二标识确定一个或多个目标的速度,具体可以通过如下方式实现:处理单元根据n1确定第一标识对应的第一混叠系数区间,并根据m1确定第二标识对应的第二混叠系数区间;处理单元根据第一标识和第二标识,确定第二混叠系数区间在第一混叠系数区间内对应的混叠系数子集;处理单元根据混叠系数子集确定速度混叠系数;处理单元根据速度混叠系数和第一标识确定一个或多个目标的速度。
27.此外,该方法还包括:接收器接收测量帧经一个或多个目标反射后形成的第三回波信号,第三回波信号由第一发射天线在第一突发中以m2*t1为周期发送的chirp信号经一个或多个目标反射后形成,m2<n1,m1和m2互质;处理单元根据接收器接收到的回波信号确定一个或多个目标的速度,包括:处理单元根据第二回波信号和第三回波信号确定一个或多个目标的速度。采用上述方案,由于m1和m2互质,因而根据第一发射天线高密度发送的两组chirp信号反射后的回波信号确定的两组标识的速度分辨率相同,可以利用中国余数法(参差算法)扩大mimo雷达的测速范围。
28.此外,该方法还包括:接收器接收测量帧经一个或多个目标反射后形成的第四回波信号和第五回波信号,该测量帧还包括第二突发,第四回波信号由nt个发射天线中的第二发射天线在第二突发中以m3*t2为周期发送的chirp信号经一个或多个目标反射后形成,第五回波信号由nt个发射天线中的每个发射天线在第二突发中以n2*t2为周期发送的chirp信号经一个或多个目标反射后形成,m3<n2,t2为第二突发中每个chirp信号的持续时间;m3*t2和m1*t1互质,或者m3和m1互质且t1和t2相等;处理单元根据接收器接收到的回波信号确定一个或多个目标的速度,包括:处理单元根据第二回波信号和第四回波信号确定一个或多个目标的速度。由于m3*t2和m1*t1互质,或者m3和m1互质,因而根据第一发射天线高密度发送的chirp信号发射后的回波信号以及根据第二发射天线高密度发送的chirp信号发射后的回波信号分别确定的两组标识的速度分辨率相同,可以利用中国余数法(参差算法)扩大mimo雷达的测速范围。
29.在一种可能的设计中,该方法还包括:接收器接收测量帧经一个或多个目标反射后形成的第六回波信号,该测量帧还包括第三突发,第六回波信号由nt个发射天线中的每个发射天线在第三突发中以n3*t3为周期发送的chirp信号经一个或多个目标反射后形成,t3为第三突发中每个chirp信号的持续时间;n3*t3和m1*t1互质,或者n3和m1互质且t1和t3相等;处理单元根据接收器接收到的回波信号确定一个或多个目标的速度,包括:处理单元根据第二回波信号和第六回波信号确定一个或多个目标的速度。由于n3*t3和m1*t1互质,或者n3和m1互质,因而可以利用中国余数法(参差算法)扩大mimo雷达的测速范围。
30.在一种可能的设计中,该方法还包括:接收器接收测量帧经一个或多个目标反射后形成的第七回波信号,第七回波信号由第一发射天线在第一突发中的n1*t1时间内连续发送的多个chirp信号经过一个或多个目标反射后形成;处理单元根据接收器接收到的回
波信号确定一个或多个目标的速度,包括:处理单元根据第二回波信号和第七回波信号确定一个或多个目标的速度。采用上述实现方式,软重叠阵子时刻两个或者多个相邻时隙对应的接收天线的相位差别仅由目标速度引起的多普勒(doppler)相位确定。因此,可以通过发射密度较大的第一发射天线上计算出的目标的速度标识直接匹配出对应的速度混叠系数,从而确定目标的simo测速范围内的混叠速度。
31.第三方面,本技术实施例提供一种信号传输装置,包括:发射器,用于发送测量帧,发射器包括nt个发射天线,测量帧用于测量目标的速度,测量帧包括第一突发;其中,在第一突发中,nt个发射天线中的每个发射天线用于以n1*t1为周期发送啁啾chirp信号,其中n1》nt,t1为第一突发中每个chirp信号的持续时间。
32.在一种可能的设计中,在第一突发中,nt个发射天线中的第一发射天线还用于以m1*t1为周期发送chirp信号,其中m1<n1。
33.在一种可能的设计中,第一发射天线还用于以m2*t1为周期发送chirp信号,m2<n1,m1和m2互质。
34.在一种可能的设计中,该测量帧还包括第二突发;在第二突发中,nt个发射天线中的每个发射天线用于以n2*t2为周期发送chirp信号,nt个发射天线中的第二发射天线还用于以m3*t2发送chirp信号,m3<n2,t2为第二突发中每个chirp信号的持续时间;m3*t2和m1*t1互质,或者m3和m1互质,且t1和t2相等。
35.在一种可能的设计中,该测量帧还包括第三突发;在第三突发中,nt个发射天线中的每个发射天线用于以n3*t3为周期发送chirp信号,t3为第三突发中每个chirp信号的持续时间;n3*t3和m1*t1互质,或者n3和m1互质且t1和t3相等。
36.在一种可能的设计中,nt个发射天线中存在至少一个发射天线在第一突发中连续发送两个chirp信号。
37.在一种可能的设计中,该测量帧为调频连续波fmcw。
38.在一种可能的设计中,该装置还包括:处理单元,用于确定测量帧的配置,并通过接口将测量帧的配置发送至单片微波集成电路mmic,mmic用于根据测量帧的配置使能发射器发送测量帧。
39.第四方面,本技术实施例提供一种信号处理装置,包括:接收器,用于接收发射器发送的测量帧经一个或多个目标反射后形成的第一回波信号和第二回波信号,测量帧包括第一突发,第一回波信号由发射器包括的nt个发射天线中的每个发射天线在第一突发中以n1*t1为周期发送的chirp信号经一个或多个目标反射后形成,第二回波信号由nt个发射天线中的第一发射天线发送的其他chirp信号经一个或多个目标反射后形成,n1》nt,t1为第一突发中每个chirp信号的持续时间;处理单元,用于根据第一回波信号和第二回波信号确定一个或多个目标的速度。
40.在一种可能的设计中,处理单元在根据接收器接收到的回波信号确定一个或多个目标的速度时,具体用于:根据第一回波信号确定第一标识,第一标识用于指示一个或多个目标的距离测量值和速度测量值;根据第二回波信号确定第二标识,第二标识用于指示一个或多个目标的距离测量值和速度测量值;根据第一标识和第二标识确定一个或多个目标的速度。
41.在一种可能的设计中,第二回波信号由第一发射天线以m1*t1为周期发送的chirp
信号经一个或多个目标反射后形成,m1<n1。
42.在一种可能的设计中,处理单元在根据第一标识和第二标识确定一个或多个目标的速度时,具体用于:根据n1确定第一标识对应的第一混叠系数区间,并根据m1确定第二标识对应的第二混叠系数区间;根据第一标识和第二标识,确定第二混叠系数区间在第一混叠系数区间内对应的混叠系数子集;根据混叠系数子集确定速度混叠系数;根据速度混叠系数和第一标识确定一个或多个目标的速度。
43.在一种可能的设计中,接收器还用于:接收测量帧经一个或多个目标反射后形成的第三回波信号,第三回波信号由第一发射天线在第一突发中以m2*t1为周期发送的chirp信号经一个或多个目标反射后形成,m2<n1,m1和m2互质;处理单元在根据接收器接收到的回波信号确定一个或多个目标的速度时,具体用于:根据第二回波信号和第三回波信号确定一个或多个目标的速度。
44.在一种可能的设计中,接收器还用于:接收测量帧经一个或多个目标反射后形成的第四回波信号和第五回波信号,测量帧还包括第二突发,第四回波信号由nt个发射天线中的第二发射天线在第二突发中以m3*t2为周期发送的chirp信号经一个或多个目标反射后形成,第五回波信号由nt个发射天线中的每个发射天线在第二突发中以n2*t2为周期发送的chirp信号经一个或多个目标反射后形成,m3<n2,t2为第二突发中每个chirp信号的持续时间;m3*t2和m1*t1互质,或者m3和m1互质且t1和t2相等;处理单元在根据接收器接收到的回波信号确定一个或多个目标的速度时,具体用于:根据第二回波信号和第四回波信号确定一个或多个目标的速度。
45.在一种可能的设计中,接收器还用于:接收测量帧经一个或多个目标反射后形成的第六回波信号,测量帧还包括第三突发,第六回波信号由nt个发射天线中的每个发射天线在第三突发中以n3*t3为周期发送的chirp信号经一个或多个目标反射后形成,t3为第三突发中每个chirp信号的持续时间;n3*t3和m1*t1互质,或者n3和m1互质且t1和t3相等;处理单元在根据接收器接收到的回波信号确定一个或多个目标的速度时,具体用于:根据第二回波信号和第六回波信号确定一个或多个目标的速度。
46.在一种可能的设计中,接收器还用于:接收测量帧经一个或多个目标反射后形成的第七回波信号,第七回波信号由第一发射天线在第一突发中的n1*t1时间内连续发送的多个chirp信号经过一个或多个目标反射后形成;处理单元在根据接收器接收到的回波信号确定一个或多个目标的速度时,具体用于:根据第二回波信号和第七回波信号确定一个或多个目标的速度。
47.第五方面,本技术实施例还提供一种雷达系统,包括:发射器,发射器包括nt个发射天线,发射器用于发送测量帧,测量帧用于测量目标的速度,测量帧包括第一突发;其中,在第一突发中,nt个发射天线中的每个发射天线用于以n1*t1为周期发送chirp信号,其中n1》nt,t1为第一突发中每个chirp信号的持续时间;接收器,用于接收测量帧经一个或多个目标反射后形成的第一回波信号和第二回波信号,该测量帧包括第一突发,第一回波信号由每个发射天线在第一突发中以n1*t1为周期发送的chirp信号经一个或多个目标反射后形成,第二回波信号由第一发射天线发送的其他chirp信号经一个或多个目标反射后形成;处理单元,用于根据接收器接收到的回波信号确定一个或多个目标的速度。
48.此外,雷达系统中的发射器还用于执行第一方面提供的方法中发射器所执行的其
他操作,雷达系统中的接收器还用于执行第二方面提供的方法中接收器所执行的其他操作,雷达系统中的处理单元还用于执行第一方面或第二方面提供的方法中处理单元所执行的其他操作。
附图说明
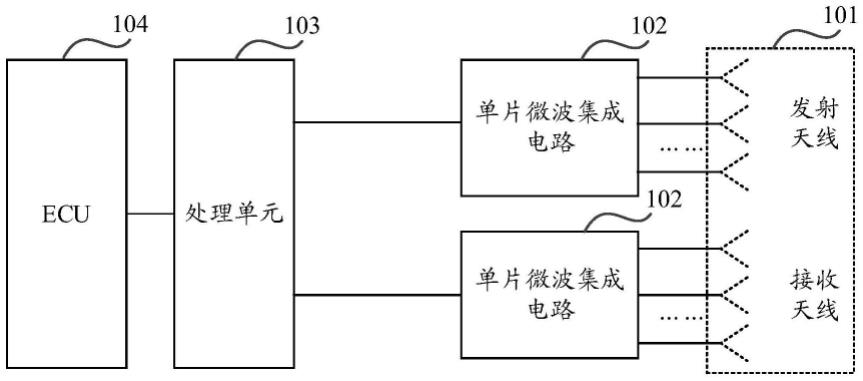
49.图1为本技术实施例提供的一种mimo雷达的结构示意图;
50.图2为本技术实施例提供的一种车辆的结构示意图;
51.图3为本技术实施例提供的一种信号传输方法的流程示意图;
52.图4为本技术实施例提供的第一种mimo雷达发送的啁啾信号的示意图;
53.图5为本技术实施例提供的第二种mimo雷达发送的啁啾信号的示意图;
54.图6为本技术实施例提供的第三种mimo雷达发送的啁啾信号的示意图;
55.图7为本技术实施例提供的第四种mimo雷达发送的啁啾信号的示意图;
56.图8为本技术实施例提供的第五种mimo雷达发送的啁啾信号的示意图;
57.图9为本技术实施例提供的第六种mimo雷达发送的啁啾信号的示意图;
58.图10为本技术实施例提供的第七种mimo雷达发送的啁啾信号的示意图;
59.图11为本技术实施例提供的第八种mimo雷达发送的啁啾信号的示意图;
60.图12为本技术实施例提供的一种信号处理方法的流程示意图;
61.图13为本技术实施例提供的一种信号传输装置的结构示意图;
62.图14为本技术实施例提供的一种信号处理装置的结构示意图;
63.图15为本技术实施例提供的一种雷达系统的结构示意图。
具体实施方式
64.通常,雷达的最大测速范围可以表示为vmax=λ/4*tc,其中λ为调制频率的波长,tc为同一根天线重复发送的周期。假设单个天线发送一个chirp的持续时间为tc_simo(可以称为一个时隙)。那么,tdm mimo雷达中,nt个天线采用tdm方式发送nt个chirp信号时,需要的时间tc_mimo满足:tc_mimo≥nt*tc_simo。因此,采用nt个天线发送chirp时的最大测速范围vmax_mimo和采用单个天线发送chirp时的最大测速范围vmax_simo的关系可以表示为:vmax_simo≥nt*vmax_mimo。通过上述公式可以看出,mimo雷达中,由于发射天线的数目增多,导致最大测速范围下降。而且发射天线的数量nt越多,最大测速范围下降的问题越严重。
65.雷达是利用多普勒效应进行速度测量的装置。由于目标或雷达的运动,使得雷达的接收信号发射频率变化或者相位变化。在fmcw体制中,通过测量一个chirp内的回波信号频率来测量目标与雷达之间的距离,通过相同天线不同时隙的回波信号间的相位差来测量目标的速度。因此,也将对应速度的维度称为多普勒域,即rd map上doppler对应的维度。
66.时分发送的多个天线上的雷达信号导致目标的速度在多普勒域碰撞的概率变大,即发生多个目标的反射信号在多普勒域的观测值相同,从而导致每个目标的速度求解的复杂度和准确性面临考验。例如,采用simo方式发送时,最大测速范围为-120km/h-120km/h;通过4个天线采用tdm mimo方式发送时,最大测速范围降低为-30km/h-30km/h。那么,与采用simo方式发送相比,采用tdm mimo方式发送时,目标的速度在多普勒域碰撞的概率变大。
67.基于上述问题,本技术实施例提供一种信号传输方法及装置、信号处理方法及装置以及雷达系统,使得mimo雷达能够准确地将目标的速度恢复到simo雷达的测速范围。
68.下面对本技术实施例的应用场景进行介绍。
69.具体地,本技术实施例中,如图1所示,mimo雷达系统可以包括天线阵列101、单片微波集成电路(monolithic microwave integrated circuit,mmic)102和处理单元103。天线阵列101可以包括多个发射天线和多个接收天线。
70.其中,单片微波集成电路102用于产生雷达信号,进而通过天线阵列101将雷达信号发出。雷达信号由一个或多个突发(burst)组成,每个突发包括多个啁啾信号。雷达信号发出后,经一个或多个目标反射后形成回波信号,回波信号被接收天线接收。单片微波集成电路102还用于对天线阵列101接收到的回波信号进行变换和采样等处理,并将处理后的回波信号传输至处理单元103。
71.其中,处理单元103用于对回波信号进行快速傅里叶变换(fast fourier transformation,fft)、信号处理等操作,从而根据接收到的回波信号确定目标的距离、速度、方位角等信息。具体地,该处理单元103可以是微处理器(microcontroller unit,mcu)、中央处理器(central process unit,cpu)、数字信号处理器(digital signal processor,dsp)、现场可编程门阵列(field-programmable gate array,fpga)等具有处理功能的器件。
72.此外,图1所示的雷达系统还可以包括电子控制单元(electronic control unit,ecu)104,用于根据处理单元103处理后得到的目标距离、速度、方位角等信息对车辆进行控制,例如确定车辆的行使路线等。
73.需要说明的是,实际应用中,可以针对发射天线阵列和接收天线阵列分别设置一个mmic,也可以针对发射天线阵列和接收天线阵列仅设置一个mmic,图1的实例中以前者为例进行示意。
74.本技术实施例中的发射器可以由发射天线与单片微波集成电路102中的发射通道构成,接收器可以由接收天线与单片微波集成电路102中的接收通道构成。其中,发射天线和接收天线可以位于印刷电路板(print circuit board,pcb)上,发射通道和接收通道可以位于芯片内,即aob(antenna on pcb);或者,发射天线和接收天线可以位于芯片封装内,发射通道和接收通道可以位于芯片内,即aip(antenna in package)。本技术实施例中对于组合形式不做具体限定。
75.应理解,本技术实施例中对发射通道和接收通道的具体结构不做限定,只要能实现相应发射和接收功能即可。
76.此外,同样需要说明的是,本技术实施例中所述的雷达系统可以应用于多种领域,示例性地,本技术实施例中的雷达系统包括但不限于车载雷达、路边交通雷达,无人机雷达。
77.另外由于单个射频芯片的通道规格数比较有限,系统需要的收发通道数大于单个射频芯片时,需要多个芯片级联。因此,整个雷达系统可能包括多个射频芯片级联,通过接口连接模拟数字转换器(analog digital converter,adc)通道输出的数据到处理单元103,例如mcu,dsp,fpga,通用处理单元(general process unit,gpu)等。另外整车可能安装一个或多个雷达系统,并且通过车载总线和中央处理器连接。中央处理器控制一个或多
个车载传感器,包括一个或多个毫米波雷达传感器。
78.图1所示的mimo雷达系统可以应用于具有自动驾驶功能的车辆。参见图2,为本技术实施例提供的具有自动驾驶功能的车辆200的功能框图。在一个实施例中,将车辆200配置为完全或部分地自动驾驶模式。例如,车辆200可以在处于自动驾驶模式中的同时控制自身,并且可通过人为操作来确定车辆及其周边环境的当前状态,确定周边环境中的至少一个其他车辆的可能行为,并确定该其他车辆执行可能行为的可能性相对应的置信水平,基于所确定的信息来控制车辆200。在车辆200处于自动驾驶模式中时,可以将车辆200置为在没有和人交互的情况下操作。
79.车辆200可包括各种子系统,例如行进系统202、传感器系统204、控制系统206、一个或多个外围设备208以及电源210、计算机系统212和用户接口216。可选地,车辆200可包括更多或更少的子系统,并且每个子系统可包括多个元件。另外,车辆200的每个子系统和元件可以通过有线或者无线互连。
80.行进系统202可包括为车辆200提供动力运动的组件。在一个实施例中,行进系统202可包括引擎218、能量源219、传动装置220和车轮/轮胎221。引擎218可以是内燃引擎、电动机、空气压缩引擎或其他类型的引擎组合,例如气油发动机和电动机组成的混动引擎,内燃引擎和空气压缩引擎组成的混动引擎。引擎218将能量源219转换成机械能量。
81.能量源219的示例包括汽油、柴油、其他基于石油的燃料、丙烷、其他基于压缩气体的燃料、乙醇、太阳能电池板、电池和其他电力来源。能量源219也可以为车辆100的其他系统提供能量。
82.传动装置220可以将来自引擎218的机械动力传送到车轮221。传动装置220可包括变速箱、差速器和驱动轴。在一个实施例中,传动装置220还可以包括其他器件,比如离合器。其中,驱动轴可包括可耦合到一个或多个车轮221的一个或多个轴。
83.传感器系统204可包括感测关于车辆200周边的环境的信息的若干个传感器。例如,传感器系统204可包括定位系统222(定位系统可以是全球定位系统(global positioning system,gps)系统,也可以是北斗系统或者其他定位系统)、惯性测量单元(inertial measurement unit,imu)224、雷达226、激光测距仪228以及相机230。传感器系统204还可包括被监视车辆200的内部系统的传感器(例如,车内空气质量监测器、燃油量表、机油温度表等)。来自这些传感器中的一个或多个的传感器数据可用于检测对象及其相应特性(位置、形状、方向、速度等)。这种检测和识别是自主车辆100的安全操作的关键功能。
84.定位系统222可用于估计车辆200的地理位置。imu 224用于基于惯性加速度来感测车辆200的位置和朝向变化。在一个实施例中,imu 224可以是加速度计和陀螺仪的组合。
85.雷达226可利用无线电信号来感测车辆200的周边环境内的物体。在一些实施例中,除了感测物体以外,雷达226还可用于感测物体的速度和/或前进方向。在一个具体示例中,雷达226可以采用图1所示的mimo雷达系统实现。
86.激光测距仪228可利用激光来感测车辆100所位于的环境中的物体。在一些实施例中,激光测距仪228可包括一个或多个激光源、激光扫描器以及一个或多个检测器,以及其他系统组件。
87.相机230可用于捕捉车辆200的周边环境的多个图像。相机230可以是静态相机或
视频相机。
88.控制系统206为控制车辆200及其组件的操作。控制系统206可包括各种元件,其中包括转向系统232、油门234、制动单元236、传感器融合算法238、计算机视觉系统240、路线控制系统242以及障碍物避免系统244。
89.转向系统232可操作来调整车辆200的前进方向。例如在一个实施例中可以为方向盘系统。
90.油门234用于控制引擎218的操作速度并进而控制车辆200的速度。
91.制动单元236用于控制车辆200减速。制动单元236可使用摩擦力来减慢车轮221。在其他实施例中,制动单元236可将车轮221的动能转换为电流。制动单元236也可采取其他形式来减慢车轮221转速从而控制车辆200的速度。
92.计算机视觉系统240可以操作来处理和分析由相机230捕捉的图像以便识别车辆200周边环境中的物体和/或特征。所述物体和/或特征可包括交通信号、道路边界和障碍物。计算机视觉系统240可使用物体识别算法、运动中恢复结构(structure from motion,sfm)算法、视频跟踪和其他计算机视觉技术。在一些实施例中,计算机视觉系统240可以用于为环境绘制地图、跟踪物体、估计物体的速度等等。
93.路线控制系统242用于确定车辆200的行驶路线。在一些实施例中,路线控制系统142可结合来自传感器238、gps 222和一个或多个预定地图的数据以为车辆200确定行驶路线。
94.障碍物避免系统244用于识别、评估和避免或者以其他方式越过车辆200的环境中的潜在障碍物。
95.当然,在一个实例中,控制系统206可以增加或替换地包括除了所示出和描述的那些以外的组件。或者也可以减少一部分上述示出的组件。
96.车辆200通过外围设备208与外部传感器、其他车辆、其他计算机系统或用户之间进行交互。外围设备208可包括无线通信系统246、车载电脑248、麦克风250和/或扬声器252。
97.在一些实施例中,外围设备208提供车辆200的用户与用户接口216交互的手段。例如,车载电脑248可向车辆200的用户提供信息。用户接口216还可操作车载电脑248来接收用户的输入。车载电脑248可以通过触摸屏进行操作。在其他情况中,外围设备208可提供用于车辆200与位于车内的其它设备通信的手段。例如,麦克风250可从车辆200的用户接收音频(例如,语音命令或其他音频输入)。类似地,扬声器252可向车辆200的用户输出音频。
98.无线通信系统246可以直接地或者经由通信网络来与一个或多个设备无线通信。例如,无线通信系统246可使用3g蜂窝通信,例如码分多址(code division multiple access,cdma)、evd0、全球移动通信系统(global system for mobile communications,gsm)/通用分组无线服务技术(general packet radio service,gprs),或者4g蜂窝通信,例如长期演进(long term evolution,lte),或者5g蜂窝通信。无线通信系统246可利用wifi与无线局域网(wireless local area network,wlan)通信。在一些实施例中,无线通信系统246可利用红外链路、蓝牙或zigbee与设备直接通信。其他无线协议,例如各种车辆通信系统,例如,无线通信系统246可包括一个或多个专用短程通信(dedicated short range communications,dsrc)设备,这些设备可包括车辆和/或路边台站之间的公共和/或
私有数据通信。
99.电源210可向车辆200的各种组件提供电力。在一个实施例中,电源210可以为可再充电锂离子或铅酸电池。这种电池的一个或多个电池组可被配置为电源为车辆200的各种组件提供电力。在一些实施例中,电源210和能量源219可一起实现,例如一些全电动车中那样。
100.车辆200的部分或所有功能受计算机系统212控制。计算机系统212可包括至少一个处理器223,处理器223执行存储在例如存储器224这样的非暂态计算机可读介质中的指令225。计算机系统212还可以是采用分布式方式控制车辆200的个体组件或子系统的多个计算设备。
101.处理器223可以是任何常规的处理器,诸如商业可获得的中央处理器(central processing unit,cpu)。替选地,该处理器可以是诸如专用集成电路(application specific integrated circuits,asic)或其它基于硬件的处理器的专用设备。尽管图2功能性地图示了处理器、存储器、和在相同块中的计算机210的其它元件,但是本领域的普通技术人员应该理解该处理器、计算机、或存储器实际上可以包括可以或者可以不存储在相同的物理外壳内的多个处理器、计算机、或存储器。例如,存储器可以是硬盘驱动器或位于不同于计算机210的外壳内的其它存储介质。因此,对处理器或计算机的引用将被理解为包括对可以或者可以不并行操作的处理器或计算机或存储器的集合的引用。不同于使用单一的处理器来执行此处所描述的步骤,诸如转向组件和减速组件的一些组件每个都可以具有其自己的处理器,所述处理器只执行与特定于组件的功能相关的计算。
102.在此处所描述的各个方面中,处理器可以位于远离该车辆并且与该车辆进行无线通信。在其它方面中,此处所描述的过程中的一些在布置于车辆内的处理器上执行而其它则由远程处理器执行,包括采取执行单一操纵的必要步骤。
103.在一些实施例中,存储器224可包含指令225(例如,程序逻辑),指令225可被处理器223执行来执行车辆200的各种功能,包括以上描述的那些功能。存储器214也可包含额外的指令,包括向行进系统202、传感器系统204、控制系统206和外围设备208中的一个或多个发送数据、从其接收数据、与其交互和/或对其进行控制的指令。
104.除了指令225以外,存储器224还可存储数据,例如道路地图、路线信息,车辆的位置、方向、速度以及其它这样的车辆数据,以及其他信息。这种信息可在车辆200在自主、半自主和/或手动模式中操作期间被车辆200和计算机系统212使用。
105.用户接口216,用于向车辆200的用户提供信息或从其接收信息。可选地,用户接口216可包括在外围设备208的集合内的一个或多个输入/输出设备,例如无线通信系统246、车载电脑248、麦克风250和扬声器252。
106.计算机系统212可基于从各种子系统(例如,行进系统202、传感器系统204和控制系统206)以及从用户接口216接收的输入来控制车辆200的功能。例如,计算机系统212可利用来自控制系统206的输入以便控制转向单元232来避免由传感器系统204和障碍物避免系统244检测到的障碍物。在一些实施例中,计算机系统212可操作来对车辆200及其子系统的许多方面提供控制。
107.可选地,上述这些组件中的一个或多个可与车辆200分开安装或关联。例如,存储器224可以部分或完全地与车辆200分开存在。上述组件可以按有线和/或无线方式来通信
地耦合在一起。
108.可选地,上述组件只是一个示例,实际应用中,上述各个模块中的组件有可能根据实际需要增添或者删除,图2不应理解为对本技术实施例的限制。
109.在道路行进的自动驾驶汽车,如上面的车辆200,可以识别其周围环境内的物体以确定对当前速度的调整。所述物体可以是其它车辆、交通控制设备、或者其它类型的物体。在一些示例中,可以独立地考虑每个识别的物体,并且基于物体的各自的特性,诸如它的当前速度、加速度、与车辆的间距等,可以用来确定自动驾驶汽车所要调整的速度。
110.可选地,自动驾驶汽车车辆200或者与自动驾驶车辆200相关联的计算设备(如图2的计算机系统212、计算机视觉系统240、存储器224)可以基于所识别的物体的特性和周围环境的状态(例如,交通、雨、道路上的冰、等等)来预测所述识别的物体的行为。可选地,每一个所识别的物体都依赖于彼此的行为,因此还可以将所识别的所有物体全部一起考虑来预测单个识别的物体的行为。车辆200能够基于预测的所述识别的物体的行为来调整它的速度。换句话说,自动驾驶汽车能够基于所预测的物体的行为来确定车辆将需要调整到(例如,加速、减速、或者停止)什么稳定状态。在这个过程中,也可以考虑其它因素来确定车辆200的速度,诸如,车辆200在行驶的道路中的横向位置、道路的曲率、静态和动态物体的接近度等等。
111.除了提供调整自动驾驶汽车的速度的指令之外,计算设备还可以提供修改车辆200的转向角的指令,以使得自动驾驶汽车遵循给定的轨迹和/或维持与自动驾驶汽车附近的物体(例如,道路上的相邻车道中的轿车)的安全横向和纵向距离。
112.上述车辆200可以为轿车、卡车、摩托车、公共汽车、船、飞机、直升飞机、割草机、娱乐车、游乐场车辆、施工设备、电车、高尔夫球车、火车、和手推车等,本技术实施例不做特别的限定。
113.下面将结合附图对本技术实施例作进一步地详细描述。
114.需要说明的是,本技术实施例中,多个,是指两个或两个以上。另外,需要理解的是,在本技术的描述中,“第一”、“第二”等词汇,仅用于区分描述的目的,而不能理解为指示或暗示相对重要性,也不能理解为指示或暗示顺序。角度和速度耦合是指当仅存在一个目标时在角度和速度的模糊函数上,会出现多个虚假的峰值,影响目标的判断。下面,对本技术实施例的应用场景加以简单介绍。
115.参见图3,为本技术实施例提供的一种信号传输方法,该方法应用于mimo雷达。其中,mimo雷达包括发射器,发射器中包括nt个发射天线。具体地,图3所示的方法包括如下步骤。
116.s301:发射器发送测量帧。该测量帧包括第一突发(burst1),用于测量目标的速度。
117.其中,测量帧可以为调频连续波(frequency modulated continuous wave,fmcw),也可以采用其他mimo雷达所使用的波形,例如、多频移键控(multiple frequency-shift keying,mfsk)、调相连续波(phase modulated continuous wave,pmcw)中的任一种,本技术对此不做限定。为了方便描述,本技术实施例中以fmcw波形为例描述。
118.其中,在第一突发中,nt个发射天线中的每个发射天线用于以n1*t1为周期发送啁啾(chirp)信号,n1>nt,t1为第一突发中每个chirp信号的持续时间。在实际信号中,每个
chirp信号的持续时间包括扫频时间(即有效测量时间)和空闲时间(例如锁相环稳定时间、模数转换器稳定时间等)。
119.其中,n1>nt的含义是:每个发射天线发送chirp信号的周期是n1*t1,假设一个周期内发射的chirp信号称为一轮chirp信号。那么,一轮chirp信号的数量(n1)大于发射天线的数量(nt)。也就是说,在一轮chirp信号中,除了每个发射天线发送一个chirp信号(即发送一个时隙)组成nt个时隙之外,还存在n1-nt个时隙。即nt发射天线中至少一个天线在n1-nt个时隙上发送chirp信号,本技术实施例中,第一发射天线和第二发射天线均可以视为在n1-nt个时隙上发送chirp信号的发射天线。
120.由于n1-nt》0,可以理解为本技术实施例与传统mimo雷达(通常n1-nt=0)相比引入了传输开销,其中n1-nt个时隙可以理解为本技术实施例中引入的额外传输开销。在工程上应该尽量避免开销过大,建议n1《2*g*nt,其中g为nt个发射天线分成整数个组的数目。当g=1时,2*nt》n1》nt;当g≠1时,2*g*nt》n1》nt。在发射天线数比较少例如nt=2,3的时候,g=1,2,3,4,5,6;当发射天线数比较多,例如nt=6~12时候,g=1,2。
121.由于车载环境非常复杂,目标在空间维(距离,水平方位角和垂直方位角)和速度维的分辨率要求不一定相同。因此,可以根据车载环境动态配置一个突发中发射天线数nt和tdm mimo中重复周期n1*t1的具体数值。通常,ecu通过常用车载总线,如控制器局域网(controller area network,can)、具有可变速率的控制器局域网(controller area network with flexible data-rate,can-fd)、通用以太网(general ethernet,ge)等车载接口将nt和n1*t1等参数配置给雷达模组。雷达模组中可以通过串行外设接口(serial peripheral interface,spi)将上述参数配置给mimc。在多片级联的情况下,可以通过配置主、从射频前端芯片实现灵活配置。mmic可用于根据测量帧的配置使能发射器发送测量帧。
122.需要说明的是,车载接口将上述参数配置给雷达模组时,配置的参数不限于上述举例,配置参数用于指示发射天线如何发送chirp信号即可。示例性地,配置参数可以是nt、n1、t1的具体数值,也可以是nt、n1、t1的具体数值的等同参数。
123.本技术实施例中,突发是时间段上的概念,突发也可以称为时隙、子帧、帧等。此外,在本技术的描述中,时隙为最小的时间单元,一个突发包括至少一个时隙,一个子帧包括至少一个突发,一个帧包括至少一个子帧。
124.具体地,本技术实施例中引入的额外传输开销(即n1-nt个时隙)可以为一个时隙,也可以为多个时隙。若额外传输开销为多个时隙,则第一发射天线在发送n1-nt个chirp信号时,可以周期性发送,也可以非周期性发送。
125.示例性地,若额外传输开销为一个时隙,则以n1=13、nt=12为例,nt个发射天线发送的一轮chirp信号可以如图4所示。在图4的示例中,一个长条代表一个chirp信号,每个chirp信号占用一个时隙。其中,白色填充部分可以视为每个发射天线以n1*t1为周期发送的chirp信号,黑色填充部分可以视为第一发射天线发送的n1-nt个chirp信号。特别地,在图4的示例中,第一发射天线发送的n1-nt个chirp信号与第一发射天线以n1*t1为周期发送的chirp信号是时间上连续的两个chirp信号(形成软重叠阵子)。将12个发射天线以1、2、3
……
12编号,其中第一发射天线用1编号,那么每个发射天线对应发送的chirp信号可以如图4中的标示。从图4中可以看出,在一轮chirp信号中,第一发射天线除了在第3个时隙上以n1*t1为周期发送chirp信号外,还在第四个时隙上发送n1-nt个chirp信号。
126.需要说明的是,在图4的示例中,仅示出了一轮chirp信号,实际应用中,发射天线可以发送ndoppler轮chirp信号,以组成第一突发。示例性地,ndoppler=64,128。
127.同样需要说明的是,在本技术的示例中,均与图4的示例类似,用一个长条代表一个chirp信号,该长条的形状仅为示意,并不代表实际应用中的chirp信号的波形。本技术实施例中对chirp信号的具体波形不做限定。
128.示例性地,若额外传输开销为多个时隙,且在一轮chirp信号中,n1-nt个chirp信号非周期性发送,则以n1=14、nt=12为例,nt个发射天线发送的一轮chirp信号可以如图5所示。其中,白色填充部分可以视为每个发射天线以n1*t1为周期发送的chirp信号,黑色填充部分可以视为第一发射天线发送的n1-nt个chirp信号。其中,每个发射天线对应发送的chirp信号可以如图5中的标示。从图5中可以看出,在一轮chirp信号中,第一发射天线除了在第3个时隙上以n1*t1为周期发送chirp信号外,还在第一个时隙和第二个时隙上连续发送n1-nt个chirp信号(第一个时隙、第二个时隙以及第三个时隙上发送的chirp信号形成软重叠阵子)。同样地,发射天线可以发送ndoppler轮图5所示的chirp信号,以组成第一突发。
129.在另一种示例中,若额外传输开销为多个时隙,且在一轮chirp信号中,n1-nt个chirp信号非周期性发送,则以nt=3、n1=12为例,nt个发射天线发送的一轮chirp信号可以如图6所示。在图6中,对于每一个发射天线,均存在时间上连续发送多个chirp信号的情况。
130.应理解,在图6所示的示例中,n1>nt,但是在nt个发射天线中并不存在严格意义上高密度发送的天线,因为每个发射天线在一轮chirp信号中发送的信号数量相同。这可以视为本技术中的一个特殊示例。也就是说,为了使得n1>nt,本技术实施例中通常配置一个或多个高密度天线,用以发送n1-nt个时隙。但是在有些示例中,也可以通过每个发射信号在一个周期内分别发送相同数量的chirp信号、且发送chirp信号的顺序是打乱的,采用这种方式也可以实现n1>nt。
131.在另一种示例中,在一轮chirp信号中进行高密度发送的发射天线不限于第一发射天线。示例性地,如图7所示,以nt=12、n1=16为例,在一轮chirp信号中,标号为1的发射天线在第一个时隙和第二个时隙上发送chirp信号,标号为4的发射天线在第五个时隙和第六个时隙上发送chirp信号,标号为7的发射天线在第九个时隙和第十个时隙上发送chirp信号。标号为10的发射天线在第十三个时隙和第十四个时隙上发送chirp信号。也就是说,在图7的示例中高密度发送的发射天线有四个。
132.当然,若n1-nt的数量为多个,n1-nt个chirp信号也可以周期性发送。在这种情况下,在第一突发中,第一发射天线还用于以m1*t1为周期发送chirp信号,m1<n1。也就是说,在第一突发中,每个发射天线用于以n1*t1为周期发送chirp信号,此外,第一发射天线还用于以m1*t1为周期发送chirp信号。在一轮chirp信号中,第一发射天线以m1*t1为周期发送的chirp信号的数量为n1-nt。
133.示例性地,若发射器中包括12个发射天线(nt=12),n1=16、m1=4,则12个发射天线发射一轮chirp信号可以如图8所示。在图8中,黑色填充部分可以视为第一发射天线以m1*t1为周期发送的chirp信号,白色填充部分可以视为每个发射天线以n1*t1为周期发送的chirp信号。具体的,在图8所示的16个chirp信号中,第一发射天线发射的chirp信号的数量为4+1=5,另外11个发射天线中的每个发射天线发送的chirp信号的数量为1。实际应用
中,在第一突发中,图8所示的组合可以被发送ndoppler次以组成第一突发。比如,ndoppler=128。
134.示例性,若发射器中包括12个发射天线(nt=12),n1=15、m1=5,则12个发射天线发射一轮chirp信号可以如图9所示。在图9中,黑色填充部分可以视为第一发射天线以m1*t1为周期发送的chirp信号,白色填充部分可以视为每个发射天线以n1*t1为周期发送的chirp信号。具体的,在图9所示的15个chirp信号中,第一发射天线发射的chirp信号的数量为3+1=4,另外11个发射天线中的每个发射天线发送的chirp信号的数量为1。同样地,在第一突发中,图9所示的组合可以被发送ndoppler次以组成第一突发。
135.从图8和图9的两个示例可以看出,在第一突发中,除了每个发射天线周期性地发送chirp信号外,还存在一个发射密度较大的第一发射天线,该第一发射天线还额外地以较短的周期发送chirp信号。nt个发射天线在发送一轮chirp信号时,nt个发射天线被分成nt/(m1-1)组,nt个发射天线在一轮中发送nt/(m1-1)+nt个chirp信号。例如,在图8的示例中,12个发射天线被分成12/(4-1)组,每组中包括一个高密度发送的chirp信号(黑色填充部分)和三个低密度发送的chirp信号(白色填充部分)。一轮chirp信号中包括12/(4-1)+12=16个chirp信号。
136.此外,在实际应用中,考虑到处理时延和功耗等因素,一个测量帧中还存在占空比p%。例如在更新周期为20hz的设计约束下,每个测量帧不能大于50ms,其中每个chirp信号的持续时间t1取20μs,ndoppler=128,nt=12,n1=16,那么一个测量帧中可以用于有效测量的时间为20*128*16=40.96ms,占空比为82%左右。
137.采用如上方式发送chirp信号,可以实现发射天线的不同密度的发送,其中第一发射天线的发送密度较大,其余发射天线的发送密度较小。由于高密度发射天线对应接收的回波信号的最大测速范围大,因而高密度发射天线发送时可以形成更小的发射重复周期,那么采用谱峰搜索方法时,高密度发射天线对应的接收的回波信号相对simo的速度混叠系数的数量少,利用高密度的发射天线对应的接收的回波信号辅助低密度发射天线对应的接收的回波信号进行目标速度的计算,可以缩小角度谱峰搜索中混叠系数的区间范围,降低计算的复杂度。此外,对于通过高密度发送chirp信号形成软重叠阵子的方式(图4~图7的示例),由于时间上相邻发射的天线接收回波信号的相位仅有目标速度引入,可以通过计算相邻发射的天线接收回波信号的相位差,获得目标速度的混叠区间。
138.此外,在第一突发中,第一发射天线还用于以m2*t1为周期发送chirp信号,m2<n1,m1和m2互质。
139.也就是说,与前述方案相比,在第一突发中,第一发射天线的发射密度更大。通过获取第一发射天线以m1*t1为周期发送chirp信号经一个或多个目标反射后的回波信号,并对该回波信号进行检测,可以获取一个或多个目标的标识(即一组标识);通过获取第一发射天线以m2*t1为周期发送chirp信号经一个或多个目标反射后的回波信号,并对该回波信号进行检测,可以获取一个或多个目标的标识(即一组标识)。由于m1和m2互质,那么可以利用中国余数法(参差算法)扩大mimo雷达的测速范围。
140.在上述方案中,除了每个发射天线以n1*t1为周期发送chirp信号以外,第一发射天线还以m1*t1以及m2*t1为周期发送chirp信号。那么,在该方案中,发送一轮chirp信号则需要发送n1=m1*m2个chirp信号。其中,m1个时隙被发送密度为m2*t1的发射天线占用,m2
个时隙被发送密度为m1*t1的发射天线占用。其中,其中一个时隙(例如第一个时隙或最后一个时隙)可以共用。那么,还剩下m1*m0-m1-m0+1=g*nt个时隙可以用于nt个发射天线以n1*t1为周期发送chirp信号。比如,m1=3、m2=7,那么有3*7-3-7+1=12个时隙用于每个发射天线以n1*t1为周期发送chirp信号,那么高密度发送的占比约为(21-12)/21≈42.8%。再比如,m1=5、m2=7,那么有5*7-5-7+1=24个时隙用于每个发射天线以n1*t1为周期发送chirp信号,那么高密度发送的占比约为(35-24)/35≈31.4%。
141.示例性地,若发射器中包括24个发射天线,m1=5,m2=7,n1=35,则24个发射天线发射一轮chirp信号可以如图10中的a示例所示,也可以如图10的b示例所示。在图10的示例中,黑色填充部分可以视为第一发射天线以m1*n1为周期发送的chirp信号,条纹填充部分可以视为第一发射天线以m2*n1为周期发送的chirp信号,白色填充部分可以视为每个发射天线以n1*t1为周期发送的chirp信号。同样地,在第一突发中,图10中a示例或b示例所示的组合可以被发送ndoppler次以组成第一突发。b示例与a示例不同的是,b示例中,高密度发送的chirp信号与a示例相比有时间偏移。
142.采用上述方案,根据第一发射天线高密度发送的两组chirp信号反射后的回波信号确定的两组标识的速度分辨率相同。由于m1和m2互质,而在参差算法中,两两互质的任意整数方程有解,因此采用上述方案可以利用中国余数法(参差算法)扩大mimo雷达的测速范围。
143.由于m1和m2互质,而根据第一发射天线高密度发送的两组chirp信号反射后的回波信号确定的两组标识的速度分辨率相同,可以利用中国余数法(参差算法)扩大mimo雷达的测速范围。
144.可选地,本技术实施例中,测量帧中还可以包括第二突发(burst2)。在第二突发中,nt个发射天线中的每个发射天线用于以n2*t2为周期发送chirp信号,nt个发射天线中的第二发射天线还用于以m3*t2发送chirp信号,m3<n2,t2为第二突发中每个chirp信号的持续时间;m3*t2和m1*t1互质,或者m3和m1互质且t1和t2相等。
145.与第一突发相同的是,在第二突发的发送过程中,也存在发射密度较大的发射天线(第二发射天线)以及发射密度较小的发射天线(除第二发射天线之外的其他发射天线)。其中,第一发射天线和第二发射天线可以是同一个发射天线,也可以是不同发射天线。
146.在上述实现方式中,m3*t2和m1*t1互质,或者m3和m1互质且t1和t2相等。具体地,若t1和t2不相等,则m3*t2和m1*t1互质;若t1和t2相等,则m3和m1互质。比如,t1=20μs,t2=21μs,m1=5,m3=7,则m3*t2和m1*t1互质可以理解为20*5与21*7互质;再比如,t1=t2=10μs,m1=3,m3=8,则m1和m3互质。
147.采用上述方案,根据第一发射天线高密度发送的chirp信号发射后的回波信号以及根据第二发射天线高密度发送的chirp信号发射后的回波信号分别确定的两组标识的速度分辨率相同。由于m3*t2和m1*t1互质,或者m3和m1互质,而在参差算法中,两两互质的任意整数方程有解,因此采用上述方案可以利用中国余数法(参差算法)扩大mimo雷达的测速范围。
148.可选地,本技术实施例中,测量帧中还可以包括第三突发;在第三突发中,nt个发射天线中的每个发射天线用于以n3*t3为周期发送chirp信号,t3为第三突发中每个chirp信号的持续时间;n3*t3和m1*t1互质,或者n3和m1互质且t3和t1相等。
149.不难看出,在第三突发中,每个发射天线的发射密度相同。
150.此外,在上述实现方式中,n3*t3和m1*t1互质,或者n3和m1互质且t1和t3相等。具体地,若t1和t3不相等,则n3*t3和m1*t1互质;若t1和t3相等,则n3和m1互质。
151.采用上述方案,由于n3*t3和m1*t1互质,或者n3和m1互质,而在参差算法中,两两互质的任意整数方程有解,因此采用上述方案可以利用中国余数法(参差算法)扩大mimo雷达的测速范围。
152.如前所述,在第一突发中,nt个发射天线中的每个发射天线用于以n1*t1为周期发送chirp信号,nt个发射天线中的第一发射天线还用于以m1*t1为周期发送chirp信号。具体实现时,第一发射天线可以是发射器中包括的nt个发射天线中的任一发射天线。那么,第一发射天线可以是发送与n1-nt个chirp信号相邻的chirp信号的发射天线,在这种情况下,在第一突发中,第一发射天线在n1*t1时间内发送的多个chirp信号中存在时间上连续发送的两个chirp信号。
153.本技术实施例中,一种可能的实现方式是,在nt个发射天线中,存在至少一个发射天线,该至少一个发射天线在第一突发中的n1*t1时间范围内,连续发送两个chirp信号。比如在上述示例中,第一发射天线是发送与n1-nt个chirp信号相邻的chirp信号的发射天线,在这种情况下,第一发射天线在第一突发中连续发送两个chirp信号。
154.也就是说,对于第一发射天线以m1*t1为周期发送的chirp信号,与其相邻的一个chirp信号是第一发射天线以n1*t1为周期发送的chirp信号。假设12个发射天线分别用1、2、3
……
12标示,第一发射天线用1标示。那么对于图8所示的示例,每个发射天线发送的chirp信号可以如图11所示。
155.换个角度来说,比如,在第一突发中,第一发射天线以m1*t1为周期发送的chirp信号占用三个时隙,与这三个时隙相邻的时隙有[2,5,7,10,12],那么第一发射天线以n1*t1为周期发送chirp信号时可以在[2,5,7,10,12]中任一时隙上发送。
[0156]
当然,上述几个示例中均以第一发射天线连续发送两个chirp信号为例进行描述,实际应用中,nt个发射天线中可以存在一个多个连续发送chirp信号的发射天线,且连续发送的chirp信号的数量也不限定为两个。例如在图5示例中,标号为1的发射天线连续发送三个chirp信号;在图6的示例中,标号为2的发射天线连续发送两个chirp信号,标号为1的发射天线连续发送三个chirp信号,标号为3的发射天线连续发送两个chirp信号。
[0157]
通过物理位置重叠的两个发射天线在相邻两个时隙上发送chirp信号的方式可以称为重叠阵子(overlapping)。而上述通过同一发射天线(例如可以是发射密度较大的第一发射天线)在相邻两个时隙上发送chirp信号的方式在本技术实施例中可以称为软重叠阵子,即通过软件方式实现重叠阵子。采用上述实现方式,软重叠阵子时刻两个或者多个相邻时隙对应的接收天线的相位差别仅由目标速度引起的多普勒(doppler)相位确定。因此,可以通过发射密度较大的第一发射天线上计算出的目标的速度标识直接匹配出对应的速度混叠系数,从而确定目标的simo测速范围内的混叠速度。这里可以有多种具体计算方法,可以计算软重叠阵子对(相邻的两两为一对)的混叠系数对应的多普勒相位补偿后的接收回波数据和原始重叠阵子信号的共轭相乘,对多个接收信号求和,找多个混叠系数对应最小值对应的混叠系数。或者直接按照多个软重叠阵子对的相位差求平均,估计速度。
[0158]
不难看出,对于图4~图7示出的发射天线在一轮chirp信号中连续发送的情况,也
可以采用上述软overlapping方式计算目标的速度。需要说明的是,本技术实施例中的第一发射天线,不一定物理上序号为一的发射天线,第一发射天线可以是nt个发射天线中的任一发射天线。
[0159]
综上,采用图3所示的信号传输方法,可以实现发射天线的不同密度的发送。
[0160]
若高密度发射天线(例如可以是第一发射天线)在发送n1-nt个chirp信号时是连续发送的(比如图4~图7、图11的示例),软overlapping时刻对应的接收天线的相位差别仅由目标速度引起的多普勒(doppler)相位确定。因此,可以通过发射密度较大的第一发射天线上计算出的目标的速度标识直接匹配出对应的速度混叠系数,从而确定目标的速度。
[0161]
若高密度发射天线(例如可以是第一发射天线)在发送n1-nt个chirp信号时是周期性发送的(比如图8~图10的示例),由于高密度发射天线对应的接收的回波信号的最大测速范围大,因而高密度发射天线发送时可以形成更小的发射重复周期,那么采用谱峰搜索方法时,高密度发射天线对应的接收的回波信号相对simo的速度混叠系数的数量少,利用高密度的发射天线对应的接收的回波信号辅助低密度发射天线对应的接收的回波信号进行目标速度的计算,可以缩小角度谱峰搜索中混叠系数的区间范围,降低计算复杂度。
[0162]
因此,采用图3所示的信号传输方法,可以将mimo雷达的最大测速范围恢复到simo测速范围,不影响后续的角度测量。实际应用中,在计算出目标的速度之后,还需要根据补偿多普勒后的各接收通道上的数据进一步计算,以获取目标的方位角(例如包括水平方位角和垂直方位角),从而对获得目标的距离、速度、角度信息。因此,速度计算的准确性对方位角计算的影响较大。采用本技术实施例提供的方法可以保证方位角计算的准确性,提高角度分辨率。
[0163]
与图3所示的信号传输方法相对应地,本技术实施例还提供一种信号处理方法,用于对发射的测量帧经一个或多个目标反射后形成的回波信号进行处理,从而获取一个或多个目标的速度,进而获取一个或多个目标的方位角(例如水平方位角和垂直方位角)。
[0164]
该方法应用于mimo雷达,mimo雷达包括发射器、接收器和处理单元,发射器包括nt个发射天线,接收器包括nr个接收天线。参见图12,该方法包括如下步骤:
[0165]
s1201:接收器接收发射器发送的测量帧经一个或多个目标反射后形成的第一回波信号和第二回波信号。
[0166]
其中,该测量帧包括第一突发,第一回波信号由nt个发射天线中的每个发射天线在第一突发中以n1*t1为周期发送的chirp信号经一个或多个目标反射后形成,第二回波信号由nt个发射天线中的第一发射天线发送的其他chirp信号经一个或多个目标反射后形成。
[0167]
其中,n1》nt,t1为第一突发中每个chirp信号的持续时间。
[0168]
在s1201中,接收器接收的回波信号即图3所示方法中发射器发送的测量帧经一个或多个目标反射后的回波信号。具体地,每个发射天线以n1*t1为周期发送的chirp信号经一个或多个目标反射后形成第一回波信号,第一发射天线发送的其他chirp信号经一个或多个目标反射后形成第二回波信号。
[0169]
需要说明的是,本技术实施例中,接收器中包括nr个接收天线,nr个接收天线按照nt个发射天线的发射顺序,接收nt个回波信号,然后根据nt个发射天线和nr个接收天线之间的位置关系以及发射天线的发射顺序,将接收到的回波信号转换成第一回波信号和第二
回波信号。
[0170]
s1202:处理单元根据接收器接收到的回波信号确定一个或多个目标的速度。
[0171]
具体地,s1202中,处理单元根据接收器接收到的回波信号确定一个或多个目标的速度,可以通过如下方式实现:处理单元根据第一回波信号确定第一标识,第一标识用于指示一个或多个目标的距离测量值和速度测量值;处理单元根据第二回波信号确定第二标识,第二标识用于指示一个或多个目标的距离测量值和速度测量值;处理单元根据第一标识和第二标识确定一个或多个目标的速度。
[0172]
其中,第一标识中可以包括第一速度标识和第一距离标识,第二标识中可以包括第二速度标识和第二距离标识。在获取第一回波信号后,可以通过一维fft(1d-fft)、二维fft(2d-fft)以及相干合并/非相干合并等操作获取距离-多普勒图(range doppler map,rd map),然后根据rd map检测获得最大测速范围内的第一速度标识(vind_d)和第一距离标识(rind_d);同样地,在获取第二回波信号后,可以通过1d-fft、2d-fft以及相干合并/非相干合并等操作获取另一rd map,然后根据该rd map检测获得最大测速范围内的第二速度标识(vind_p)和第二距离标识(rind_p)。其中,第一标识对应的最大测速范围比第二标识对应的最大测速范围小。
[0173]
具体地,根据rd map进行检测时,检测方法可以有多种,包括但不限于有序统计-恒虚警率(ordered statistic-constant false alarm rate,os-cfar)检测或单元平均-恒虚警率(cell-averaging constant false alarm rate,ca-cfar)等常用检测方法,本技术实施例中不做特别限制。
[0174]
在角度谱峰搜索方法中,把不同时隙下发射天线对应的接收信号,分别补充不同的混叠系数,并且通过fft或数字波束成型(digitial beamforming,dbf)在视场角(field of view,fov)范围内搜索得到n
fft_aoa
个角度。然后获得不同混叠系数在fov内n
fft_aoa
角度谱的最大值(角度谱峰),取n1个混叠系数中对应角度谱峰值最大值的元素作为速度混叠系数。
[0175]
具体实现时,由于nt个发射天线发射的测量帧中chirp信号的排列顺序有所不同,如图4~图9中所示出的不同示例,因而处理单元在根据第一标识和所述第二标识确定一个或多个目标的速度的方式也有所不同。
[0176]
下面对确定一个或多个目标的速度的不同方式进行介绍。
[0177]
方式一
[0178]
在方式一中,第二回波信号由第一发射天线以m1*t1为周期发送的chirp信号经一个或多个目标反射后形成,m1<n1。
[0179]
也就是说,在方式一中,nt个发射天线中每个发射天线以n1*t1为周期发送chirp信号,第一发射天线还以m1*t1为周期发送chirp信号。具体示例可以参见图8或图9。nr个接收天线在接收到多个chirp信号组成的测量帧后,根据nt个发射天线和nr个接收天线之间的位置关系以及发射天线的发射顺序,将接收到的回波信号转换成第一回波信号和第二回波信号。
[0180]
那么,处理单元根据第一标识和第二标识确定一个或多个目标的速度,具体可通过如下方式实现:处理单元根据n1确定第一标识对应的第一混叠系数区间,并根据m1确定第二标识对应的第二混叠系数区间;处理单元根据第一标识和第二标识,确定第二混叠系
数区间在第一混叠系数区间内对应的混叠系数子集;处理单元根据混叠系数子集确定速度混叠系数;处理单元根据速度混叠系数和第一标识确定一个或多个目标的速度。
[0181]
其中,若n1为偶数,那么第一混叠系数区间为[-n1/2,n1/2-1];若n1为奇数,那么第一混叠系数区间为[-(n1-1)/2,(n1-1)/2];若m1为偶数,那么第二混叠系数区间为[-m1/2,m1/2-1];若m1为奇数,那么第二混叠系数区间为[-(m1-1)/2,(m1-1)/2]。不难看出,由于m1<n1,因此第一混叠系数区间的范围比第二混叠系数区间的范围大。
[0182]
以m1=4,n1=16为例,此时第一混叠系数区间为[-8,-7,-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6,7],第二混叠系数区间为[-2,-1,0,1]。
[0183]
以m1=5、n1=15为例,此时第一混叠系数区间为[-7,-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6,7],第二混叠系数区间为[-2,-1,0,1,2]。
[0184]
在计算目标的速度时,我们可以将通过rd map获取的第一标识或第二标识中的速度标识视为余数,将混叠系数区间中的数据视为商,将商与除数(最大测速范围)相乘,再与速度标识相加,即可获取目标的速度。
[0185]
在获取第一标识、第二标识、第一混叠系数区间和第二混叠系数区间之后,对于目标速度的求解还存在如下问题:由于第二标识是根据发送密度较大的第一发射天线发送的chirp信号确定,因而在第二速度标识中,多个目标碰撞的概率较小;但是由于第二混叠系数区间的范围比第一混叠系数区间的范围小,因而若要将mimo雷达的测速范围恢复到simo测速范围,还需将第二混叠系数区间折算到第一混叠系数区间,然后再用第一标识和折算后的混叠系数计算出一个或多个目标的速度。
[0186]
以第一混叠系数区间为[-7,-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6,7]、第二混叠系数区间为[-2,-1,0,1,2]为例,将第二混叠系数区间折算到第一混叠系数区间即在[-7,-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6,7]中找到与[-2,-1,0,1,2]对应的混叠系数子集。具体地,由于第一混叠系数区间的范围是第二混叠系数区间的范围的三倍,因而混叠系数子集可以有三种组合[-7,-4,-1,2,5]、[-6,-3,0,3,6]和[-5,-2,1,4,7]。这三个集合中哪个集合是混叠系数子集s,可以根据第一标识和第二标识确定。其中,混叠系数子集s可以视为第一混叠系数区间的子集。
[0187]
具体地,第一标识和第二标识中的距离标识是不会出现模糊的情况的,即对于同一个目标,第一距离标识和第二距离标识应该是近似相等的。那么,可以通过两个近似相等的距离标识分别对应的第一速度标识和第二速度标识确定第二混叠系数区间中的某个数值与第一混叠系数区间中的哪个数值对应,即可根据该对应关系确定上述三种组合中的哪个组合是混叠系数子集。
[0188]
以m1=4、n1=16为例,此时第一混叠系数区间为[-8,-7,-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6,7],第二混叠系数区间为[-2,-1,0,1]。那么高密度天线的测速范围可以对应低密度天线的测速范围的4个区间。高密度天线对应的多普勒的fft取值范围也对应低密度天线fft取值范围的4倍。因此,高密度天线中混叠系数为0时,对应的是低密度天线的ss=[0,1,2,3]中某个值。把高密度天线测到的速度标识vind_p除以低密度天线上测到的速度标识最大值并将二者的商向下取整,floor(vind_p/vind_d_max),即可以获得0,1,2,3取值范围内与高密度天线混叠系数0相对应的值。假设floor(vind_p/vind_d_max)=1,ss(1)=1,即第一混叠系数区间中的1对应第二混叠系数区间中的0。在第一混叠系数区间内每隔4
个取值为[-7,-3,1,5],[-7,-3,1,5]即为混叠系数子集s。值得注意的是,这里ss向量的下标是从0开始计数的。
[0189]
具体m1=5、n1=15,此时第一混叠系数区间为[-7,-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6,7],第二混叠系数区间为[-1,0,1],那么高密度天线的测速范围可以对应低密度天线的测速范围的3个区间。高密度天线对应的多普勒的fft取值范围也对应低密度天线fft取值范围的3倍。因此,高密度天线中混叠系数为0时,对应的是低密度天线的ss=[-1,0,1]中某个值。把高密度天线测到的速度标识vind_p除以低密度天线上测到的速度标识最大值并将二者的商向下取整,floor(vind_p/vind_d_max),即可以获得-1,0,1取值范围内与高密度天线混叠系数0相对应的值。假设floor(vind_p/vind_d_max)=1,ss(1)=1,即第一混叠系数区间中的1对应第二混叠系数区间中的0。在第一混叠系数区间内每隔3个取值为[-6,-3,0,3,6],[-6,-3,0,3,6]即为混叠系数子集s。
[0190]
此外,在执行上述方案获取rd map之后,还可以对接收天线接收到的回波信号进行补偿。若第一发射天线在第一突发中发送的chirp信号的处理增益小于每个发射天线在第一突发中以n1*t1为周期发送的chirp信号的处理增益,可以利用第一速度标识对回波信号进行多普勒相位补偿;若第一发射天线在第一突发中发送的chirp信号的处理增益大于每个发射天线在第一突发中以n1*t1为周期发送的chirp信号的处理增益,可以利用第二速度标识对回波信号进行多普勒相位补偿。
[0191]
示例性地,根据每个时隙中的发射天线对应的接收天线回波信号的相位,可以有如下公式。
[0192][0193][0194]
其中,对应的是mimo发送周期为n1*t1时第m个时隙内发射天线对应的nr个接收天线回波信号相位;对应的是simo发送周期为t1时,当m个天线都在第1个时隙内发射时,对应的nr接收回波信号相位;是在rd map上观察到的tdm mimo最大测速范围内目标速度对应的多普勒频率,是希望恢复的simo最大测速范围内目标速度对应的多普勒频率。此外,不难看出a
coef
的取值范围是第一混叠系数区间,但是在本技术实施例的实际应用中,a
coef
可以仅取到混叠系数子集中的元素即可。是m个时隙内发射天线的对应的nr个接收天线的回波信号相位补偿值。
[0195]
在确定混叠系数子集之后,可以计算混叠系数子集s中不同元素所对应的子阵接收信号在不同角度谱上的值,将混叠系数子集s中对应角度谱最大值的元素作为速度混叠系数。然后,根据速度混叠系数、最大测速范围和第一速度标识即可确定一个或多个目标的速度。其中,根据混叠系数子集确定速度混叠系数的具体方式可以参照现有技术中的描述,此处不再赘述。
[0196]
方式二
[0197]
在方式二中,接收器还接收测量帧经一个或多个目标反射后形成的第三回波信号,第三回波信号由第一发射天线在第一突发中以m2*t1为周期发送的chirp信号经一个或多个目标反射后形成,m2<n1,m1和m2互质;那么,处理单元根据接收器接收到的回波信号确定一个或多个目标的速度,具体可通过如下方式实现:处理单元根据第二回波信号和第三回波信号确定一个或多个目标的速度。
[0198]
也就是说,在方式一中,nt个发射天线中每个发射天线以n1*t1为周期发送chirp信号,第一发射天线还以m1*t1为周期发送chirp信号,以及以m2*t1为周期发送chirp信号。具体示例可以参见图10。nr个接收天线在接收到多个chirp信号组成的测量帧后,根据nt个发射天线和nr个接收天线之间的位置关系以及发射天线的发射顺序,将接收到的回波信号转换成第一回波信号、第二回波信号和第三回波信号。
[0199]
由于m1和m2互质,因而根据第二回波信号和第三回波信号确定的速度标识的速度分辨率相同,因而可以直接根据第二回波信号和第三回波信号确定的两个混叠系数区间直接确定速度混叠系数。
[0200]
方式二中的其他操作与方式一中类似,此处不再赘述。
[0201]
方式三
[0202]
在方式三中,接收器还接收测量帧经一个或多个目标反射后形成的第四回波信号和第五回波信号,该测量帧还包括第二突发,第四回波信号由nt个发射天线中的第二发射天线在第二突发中以m3*t2为周期发送的chirp信号经一个或多个目标反射后形成,第五回波信号由nt个发射天线中的每个发射天线在第二突发中以n2*t2为周期发送的chirp信号经一个或多个目标反射后形成,m3<n2,t2为第二突发中每个chirp信号的持续时间;m3*t2和m1*t1互质,或者m3和m1互质且t1和t2相等;那么,处理单元根据接收器接收到的回波信号确定一个或多个目标的速度,具体可通过如下方式实现:处理单元根据第二回波信号和第四回波信号确定一个或多个目标的速度。
[0203]
在方式三中,m3*t2和m1*t1互质,或者m3和m1互质且t1和t2相等,处理单元根据第二回波信号和第四回波信号确定一个或多个目标的速度的方式,与方式二中处理单元根据第二回波信号和第三回波信号确定一个或多个目标的速度的方式相同,此处不再赘述。
[0204]
方式四
[0205]
在方式四中,接收器还接收测量帧经一个或多个目标反射后形成的第六回波信号,该测量帧还包括第三突发,第六回波信号由nt个发射天线中的每个发射天线在第三突发中以n3*t3为周期发送的chirp信号经一个或多个目标反射后形成,t3为第三突发中每个chirp信号的持续时间;n3*t3和m1*t1互质,或者n3和m1互质且t1和t3相等;那么,处理单元根据接收器接收到的回波信号确定一个或多个目标的速度,具体可通过如下方式实现:处理单元根据第二回波信号和第六回波信号确定一个或多个目标的速度。
[0206]
在方式四中,n3*t3和m1*t1互质,或者n3和m1互质且t1和t3相等,处理单元根据第二回波信号和第六回波信号确定一个或多个目标的速度的方式,与方式二中处理单元根据第二回波信号和第三回波信号确定一个或多个目标的速度的方式相同,此处不再赘述。
[0207]
方式五
[0208]
在方式五中,接收器还接收测量帧经一个或多个目标反射后形成的第七回波信
号,第七回波信号由第一发射天线在第一突发中的n1*t1时间内连续发送的多个chirp信号经过一个或多个目标反射后形成。具体实现方式可以参见图4、图5或图9中的示例。那么,处理单元根据接收器接收到的回波信号确定一个或多个目标的速度,具体可通过如下方式实现:处理单元根据第二回波信号和第七回波信号确定一个或多个目标的速度。
[0209]
如前所述,通过物理上位置重叠的两个发射天线在相邻两个时隙上发送chirp信号的方式可以称为overlapping。而上述通过同一发射天线在相邻的两个时隙上发送chirp信号的方式在本技术实施例中可以称为软overlapping,即通过软件方式实现overlapping。采用方式五,软overlapping时刻对应的接收天线的相位差别仅由目标速度引起的多普勒(doppler)相位确定。因此,可以通过发射密度较大的第一发射天线上计算出的目标的速度标识直接匹配出对应的速度混叠系数,从而确定目标的速度。也就是说,采用方式五可以不必通过计算混叠系数子集进而确定速度混叠系数,而是直接根据第一发射天线连续发送的多个chirp信号反射后的回波信号匹配出速度混叠系数。通过overlapping确定目标速度的方式为现有技术,此处不再赘述。
[0210]
综上,采用图12所示的信号处理方法,发射天线采用不同密度发送,因而根据不同发送密度的发射天线发送的chirp信号得到的第一回波信号和第二回波信号的最大测速范围不同。
[0211]
若第一发射天线在发送n1-nt个chirp信号时是连续发送的(比如图4~图7、图11的示例),软overlapping时刻对应的接收天线的相位差别仅由目标速度引起的多普勒(doppler)相位确定。因此,可以通过发射密度较大的发射天线上计算出的目标的速度标识,直接匹配出对应的速度混叠系数,从而将mimo雷达的最大测速范围恢复到simo测速范围,确定目标的速度。
[0212]
若第一发射天线在发送n1-nt个chirp信号时是周期性发送的(比如图8~图10的示例),由于高密度发射天线对应的接收的回波信号的最大测速范围大,因而高密度发射天线发送时可以形成更小的发射重复周期,那么采用谱峰搜索方法时,高密度发射天线对应的接收的回波信号相对simo的速度混叠系数的数量少,利用高密度的发射天线对应的接收的回波信号辅助低密度发射天线对应的接收的回波信号进行目标速度的计算,可以缩小角度谱峰搜索中混叠系数的区间范围,降低计算复杂度。
[0213]
本技术实施例还提供一种信号传输装置,该装置可以用于执行图3所示的信号传输方法。参见图13,信号传输装置1300包括发射器13011301,用于发送测量帧,发射器1301包括nt个发射天线,测量帧用于测量目标的速度,测量帧包括第一突发;其中,在第一突发中,nt个发射天线中的每个发射天线用于以n1*t1为周期发送啁啾chirp信号,其中n1》nt,t1为第一突发中每个chirp信号的持续时间。
[0214]
在一种可能的设计中,在第一突发中,nt个发射天线中的第一发射天线还用于以m1*t1为周期发送chirp信号,其中m1<n1。
[0215]
在一种可能的设计中,第一发射天线还用于以m2*t1为周期发送chirp信号,m2<n1,m1和m2互质。
[0216]
在一种可能的设计中,该测量帧还包括第二突发;在第二突发中,nt个发射天线中的每个发射天线用于以n2*t2为周期发送chirp信号,nt个发射天线中的第二发射天线还用于以m3*t2发送chirp信号,m3<n2,t2为第二突发中每个chirp信号的持续时间;m3*t2和
m1*t1互质,或者m3和m1互质,且t1和t2相等。
[0217]
在一种可能的设计中,该测量帧还包括第三突发;在第三突发中,nt个发射天线中的每个发射天线用于以n3*t3为周期发送chirp信号,t3为第三突发中每个chirp信号的持续时间;n3*t3和m1*t1互质,或者n3和m1互质且t1和t3相等。
[0218]
在一种可能的设计中,nt个发射天线中存在至少一个发射天线在第一突发中连续发送两个chirp信号。
[0219]
在一种可能的设计中,该测量帧为fmcw。
[0220]
在一种可能的设计中,该装置1300还包括:处理单元1302,用于确定测量帧的配置,并通过接口将测量帧的配置发送至mmic,mmic用于根据测量帧的配置使能发射器发送测量帧。
[0221]
需要说明的是,图13所示的信号传输装置1300可用于执行图3所示的信号传输方法,信号传输装置1300中未详尽描述的实现方式可参见图3所示的信号传输方法中的相关描述。
[0222]
本技术实施例还提供一种信号处理装置,该装置可以用于执行图12所示的信号处理方法。参见图14,信号处理装置1400包括:接收器1401,用于接收发射器发送的测量帧经一个或多个目标反射后形成的第一回波信号和第二回波信号,测量帧包括第一突发,第一回波信号由发射器包括的nt个发射天线中的每个发射天线在第一突发中以n1*t1为周期发送的chirp信号经一个或多个目标反射后形成,第二回波信号由nt个发射天线中的第一发射天线发送的其他chirp信号经一个或多个目标反射后形成,n1》nt,t1为第一突发中每个chirp信号的持续时间;处理单元1402,用于根据接收器1401接收到的回波信号确定一个或多个目标的速度。
[0223]
在一种可能的设计中,处理单元1402在根据接收器1401接收到的回波信号确定一个或多个目标的速度时,具体用于:根据第一回波信号确定第一标识,第一标识用于指示一个或多个目标的距离测量值和速度测量值;根据第二回波信号确定第二标识,第二标识用于指示一个或多个目标的距离测量值和速度测量值;根据第一标识和第二标识确定一个或多个目标的速度。
[0224]
在一种可能的设计中,第二回波信号由第一发射天线以m1*t1为周期发送的chirp信号经一个或多个目标反射后形成,m1<n1。
[0225]
在一种可能的设计中,处理单元1402在根据第一标识和第二标识确定一个或多个目标的速度时,具体用于:根据n1确定第一标识对应的第一混叠系数区间,并根据m1确定第二标识对应的第二混叠系数区间;根据第一标识和第二标识,确定第二混叠系数区间在第一混叠系数区间内对应的混叠系数子集;根据混叠系数子集确定速度混叠系数;根据速度混叠系数和第一标识确定一个或多个目标的速度。
[0226]
在一种可能的设计中,接收器1401还用于:接收测量帧经一个或多个目标反射后形成的第三回波信号,第三回波信号由第一发射天线在第一突发中以m2*t1为周期发送的chirp信号经一个或多个目标反射后形成,m2<n1,m1和m2互质;处理单元1402在根据接收器1401接收到的回波信号确定一个或多个目标的速度时,具体用于:根据第二回波信号和第三回波信号确定一个或多个目标的速度。
[0227]
在一种可能的设计中,接收器1401还用于:接收测量帧经一个或多个目标反射后
形成的第四回波信号和第五回波信号,测量帧还包括第二突发,第四回波信号由nt个发射天线中的第二发射天线在第二突发中以m3*t2为周期发送的chirp信号经一个或多个目标反射后形成,第五回波信号由nt个发射天线中的每个发射天线在第二突发中以n2*t2为周期发送的chirp信号经一个或多个目标反射后形成,m3<n2,t2为第二突发中每个chirp信号的持续时间;m3*t2和m1*t1互质,或者m3和m1互质且t1和t2相等;处理单元1402在根据接收器1401接收到的回波信号确定一个或多个目标的速度时,具体用于:根据第二回波信号和第四回波信号确定一个或多个目标的速度。
[0228]
在一种可能的设计中,接收器1401还用于:接收测量帧经一个或多个目标反射后形成的第六回波信号,测量帧还包括第三突发,第六回波信号由nt个发射天线中的每个发射天线在第三突发中以n3*t3为周期发送的chirp信号经一个或多个目标反射后形成,t3为第三突发中每个chirp信号的持续时间;n3*t3和m1*t1互质,或者n3和m1互质且t1和t3相等;处理单元1402在根据接收器1401接收到的回波信号确定一个或多个目标的速度时,具体用于:根据第二回波信号和第六回波信号确定一个或多个目标的速度。
[0229]
在一种可能的设计中,接收器1401还用于:接收测量帧经一个或多个目标反射后形成的第七回波信号,第七回波信号由第一发射天线在第一突发中的n1*t1时间内连续发送的多个chirp信号经过一个或多个目标反射后形成;处理单元1402在根据接收器1401接收到的回波信号确定一个或多个目标的速度时,具体用于:根据第二回波信号和第七回波信号确定一个或多个目标的速度。
[0230]
需要说明的是,图14所示的信号处理装置1400可用于执行图12所示的信号处理方法,信号处理装置1400中未详尽描述的实现方式可参见图12所示的信号处理方法中的相关描述。
[0231]
基于同一发明构思,本技术实施例还提供一种雷达系统。参见图15,该雷达系统1500包括发射器1501、接收器1502和处理单元1503。
[0232]
发射器1501包括nt个发射天线,发射器1501用于发送测量帧,该测量帧用于测量目标的速度,该测量帧包括第一突发;其中,在第一突发中,nt个发射天线中的每个发射天线用于以n1*t1为周期发送chirp信号,其中n1》nt,t1为第一突发中每个chirp信号的持续时间。
[0233]
接收器1502用于接收发射器发送的测量帧经一个或多个目标反射后形成的第一回波信号和第二回波信号,第一回波信号由每个发射天线在第一突发中以n1*t1为周期发送的chirp信号经一个或多个目标反射后形成,第二回波信号由第一发射天线发送的其他chirp信号经一个或多个目标反射后形成。
[0234]
处理单元1503用于根据接收器1502接收到的回波信号确定一个或多个目标的速度。
[0235]
具体地,发射器1501还可用于执行图3所示方法中发射器执行的其他操作;接收器1502还可用于执行图15所示方法中接收器所执行的其他操作;处理单元1503还可用于执行图15所示方法中处理单元所执行的其他操作,此处不再赘述。
[0236]
显然,本领域的技术人员可以对本技术实施例进行各种改动和变型而不脱离本技术实施例的范围。这样,倘若本技术实施例的这些修改和变型属于本技术权利要求及其等同技术的范围之内,则本技术也意图包含这些改动和变型在内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1