视差像素校准系统及其校准方法与流程
1.本发明涉及光学痕量检测技术领域,具体而言涉及一种视差像素校准系统及其校准方法。
背景技术:
2.傅里叶变换红外(ftir)技术在有毒有害气体及化学战剂的监测中得到了广泛应用,它能够快速连续在线监测,以及对多组分气体的同时监测,逐渐成为大气环境中有毒有害气体及化学战剂监测的主要手段。在被动式遥感ftir光谱仪中,通过水平和俯仰扫描对全方位进行监测,望远镜收集待测物质的信息通过ftir光谱仪探测识别,为了避免不必要的财产和人员损失,这要求必须准确定位痕量有毒有害气体或化学战剂的位置。
3.现有技术通过在望远镜旁边安装大视场可视化相机拍摄出全画幅照片,并将探测到相应物质的位置信息显示在可视化相机拍摄的大视场全画幅照片的对应位置。由于望远镜与可视化相机的装调误差以及相对安装误差,两者光轴难以做到绝对平行,因此在远距离测量中,痕量物质的实际位置与可视化观测到的位置会随距离的变化产生不同程度的偏离,不能准确定位痕量有毒有害气体及化学战剂的位置,达不到ftir光谱仪探测痕量物质所在区域的目的。
4.因此,现有技术存在缺陷,急需改进。
技术实现要素:
5.本发明的目的在于提供一种视差像素校准系统及其校准方法,以解决目前现有光谱仪远距离探测痕量物质时,难以实现精确测量的问题。
6.本发明实施例提供一种视差像素校准系统,包括:望远镜,用于收集待测目标的光谱信息;可视化相机,用于探测所述待测目标及其周围区域的空间位置信息;光谱仪,用于扫描分析所述望远镜所收集的所述光谱信息并识别所述待测目标的特征参数信息;计算机,用于将所述光谱仪扫描得到的所述特征参数信息与所述可视化相机所探测到的所述空间位置信息进行叠加,并进行显示。
7.可选地,在本发明一些实施例中,所述待测目标为痕量物质。
8.可选地,在本发明一些实施例中,所述光谱仪包括傅里叶变换红外光谱仪。
9.可选地,在本发明一些实施例中,所述空间位置信息包括通过所述可视化相机拍摄的可视化图像;所述特征参数信息包括红外温度信息、所述待测目标的成分信息;其中所述计算机用于将所述待测目标的成分信息叠加至所述可视化图像中,并进行显示。
10.可选地,在本发明一些实施例中,所述望远镜的监测视场范围小于所述可视化相机的监测视场范围。
11.可选地,在本发明一些实施例中,所述望远镜的光谱范围为7~14μm;所述可视化相机的光谱范围为0.4~0.9μm;所述光谱仪波数范围为1500~700cm-1
。
12.相应地,本发明还提供一种基于所述的视差像素校准系统的视差像素校准方法,
包括如下步骤:步骤s1:通过所述可视化相机拍摄朝向所述待测目标方向的可视化图像;步骤s2:在所述可视图像上框选出所述待测目标及周围区域范围,通过所述望远镜与所述光谱仪在框选区域范围内扫描分析,得到所述框选区域范围内的温度分布图像;步骤s3:在所述温度分布图像内选取一特征轮廓,并得出其坐标;在所述可视化图像上找到所述特征轮廓对应的物体轮廓,并得到其坐标;步骤s4:通过计算得出所述特征轮廓与所述物体轮廓的视差;步骤s5:通过将所述特征轮廓移动单位个所述视差,使其与物体轮廓重合,视差校准完成。
13.可选地,在本发明一些实施例中,在所述步骤s2中,所述光谱仪的扫描步进角度小于所述望远镜的监测视场范围。
14.可选地,在本发明一些实施例中,在所述步骤s3中,在所述温度分布图像内选取一特征轮廓,分析得出所述特征轮廓在所述可视图像上的坐标:在所述可视化图像上找到所述特征轮廓对应的物体特征,分析得到所述物体特征在所述可视化图像上的坐标:在所述步骤s4中,通过计算得出所述特征轮廓与所述物体轮廓的视差(δx,δy)。
15.可选地,在本发明一些实施例中,在所述步骤s4中,定义所述特征轮廓与所述物体轮廓的点集距离为:
[0016][0017]
d关于(δx,δy)取得极小值的点,等价于函数:
[0018][0019]
取得极小值的点,求偏导得到式:
[0020][0021]
计算得到:
[0022]
[0023]
即所述特征轮廓与所述物体轮廓的视差为:
[0024][0025]
本发明的有益效果:本发明在待测目标周围区域确定较明显物体,对其分别通过傅里叶变换红外光谱仪扫描化学成像得到温度特征与可视化相机拍照成像得到图像特征,观察化学成像温度特征与可视化成像图像特征的偏差,通过算法移动化学成像温度特征显示的像素位置,将两幅图像拉至重合,即对视差进行了校准,达到准确定位痕量物质的目的,有效释放了光学结构的加工精度和装调难度,有利于实现工程化生产;并且采用移动像素校准视差的方法,可以广泛应用于其它领域;如疫情期间公共场所体温筛查,红外测温相机存在人脸识别准确度低,保存的图像人员身份难以辨识等问题。因此利用可见光图像进行人脸识别,本发明中移动目标像素的方法可使可见光图像与红外图像中人脸的位置重合,并在可见光图像中进行人脸与体温显示。
附图说明
[0026]
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0027]
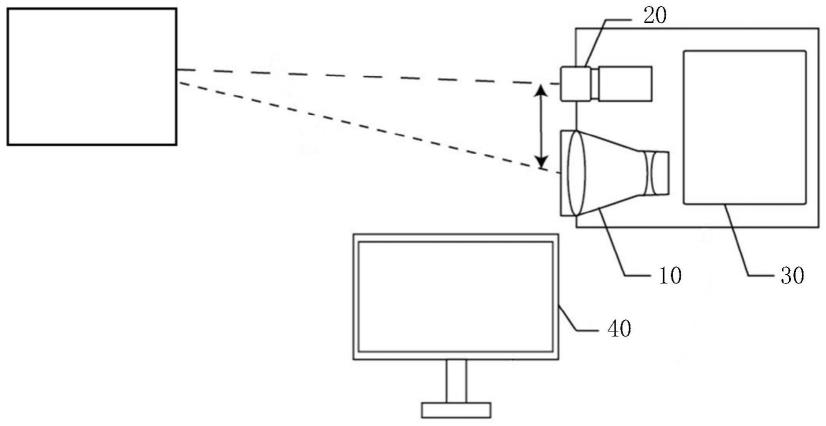
图1是本发明实施例中所述视差像素校准系统的结构分布示意图;
[0028]
图2是本发明实施例中基于所述视差像素校准系统的视差像素校准方法的流程示意图。
具体实施方式
[0029]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
[0030]
在本发明的描述中,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
[0031]
本发明实施例提供一种视差像素校准系统,包括:望远镜10,用于收集待测目标的光谱信息;可视化相机20,用于探测所述待测目标及其周围区域的空间位置信息;光谱仪30,用于扫描分析所述望远镜10所收集的所述光谱信息并识别所述待测目标的特征参数信息;计算机40,用于将所述光谱仪30扫描得到的所述特征参数信息与所述可视化相机20所探测到的所述空间位置信息进行叠加,并进行显示。
[0032]
具体地,所述望远镜10的光谱范围为7~14μm;例如:8μm、9μm、10μm、11μm、12μm、13μm等,但不仅不限于此。所述可视化相机20的光谱范围为0.4~0.9μm;例如:0.5μm、0.6μm、0.7μm、0.8μm等,但不仅不限于此。所述光谱仪30波数范围为1500~700cm-1
。
[0033]
在本发明一些实施例中,本发明中所述待测目标为痕量物质,所述痕量物质是能够被所述望远镜10、所述可视化相机20以及所述光谱仪30所接收到的。
[0034]
在本发明一些实施例中,所述的可视化相机为日夜型网络高清相机,优选地,其像素不低于1920mm
×
1080mm。
[0035]
在本发明一些实施例中,所述光谱仪30包括傅里叶变换红外光谱仪。所述傅里叶变换红外光谱仪能够解决已知物的鉴定、未知物的结构鉴定、特殊材料的定量分析、以及可针对产品表面残留物、表面析出粉末/液体、产品表面疑似发生氧化、腐蚀、外来物、外来成分引入等微量物质分析。本发明主要需要通过所述傅里叶变换红外光谱仪分析所述待测目标的红外光谱,得到结果,推断所述待测目标的来源位置。
[0036]
可选地,在本发明一些实施例中,所述空间位置信息包括通过所述可视化相机20拍摄的可视化图像;所述特征参数信息包括红外温度信息、所述待测目标的成分;其中所述计算机40用于将所述红外温度信息叠加至所述可视化图像中,并进行显示。
[0037]
在本发明一些实施例中,所述望远镜10的监测视场范围小于所述可视化相机20的监测视场范围。
[0038]
相应地,本发明还提供一种基于所述的视差像素校准系统的视差像素校准方法,包括如下步骤:
[0039]
步骤s1:通过所述可视化相机20拍摄朝向所述待测目标方向的可视化图像。具体地,所述可视化图像包括全画幅照片。
[0040]
步骤s2:在所述可视图像上框选出所述待测目标及周围区域范围,通过所述望远镜10与所述光谱仪30在框选区域范围内扫描分析,得到所述框选区域范围内的温度分布图像。在所述步骤s2中,所述光谱仪30的扫描步进角度小于所述望远镜10的监测视场范围。
[0041]
步骤s3:在所述温度分布图像内选取一特征轮廓,并得出其坐标;在所述可视化图像上找到所述特征轮廓对应的物体轮廓,并得到其坐标。
[0042]
在所述步骤s3中,在所述温度分布图像内选取一特征轮廓,分析得出所述特征轮廓在所述可视图像上的坐标:在所述可视化图像上找到所述特征轮廓对应的物体特征,分析得到所述物体特征在所述可视化图像上的坐标:
[0043][0044]
步骤s4:通过计算得出所述特征轮廓与所述物体轮廓的视差(δx,δy)。
[0045]
在所述步骤s4中,定义所述特征轮廓与所述物体轮廓的点集距离为:
[0046]
[0047]
d关于(δx,δy)取得极小值的点,等价于函数:
[0048][0049]
取得极小值的点,求偏导得到式:
[0050][0051]
计算得到:
[0052][0053]
即所述特征轮廓与所述物体轮廓的视差为:
[0054][0055]
步骤s5:通过将所述特征轮廓移动单位个所述视差,使其与物体轮廓重合,视差校准完成。通过视差校准完成后,在所述待测目标所在的距离附近,所述视差像素校准系统的探测将没有视差,当所述待测目标距离移动较大,超出所述可视化图像范围,则视差需要重新校准。视差校准完成后,就能对校准距离附近区域进行痕量物质检测,该区域范围不超过所述可视化图像所在范围,通过结合所述望远镜10、所述可视化相机20以及所述光谱仪30得到的所述待测目标的位置信息则为所述待测目标的精确位置信息。
[0056]
本发明的有益效果:本发明在待测目标周围区域确定较明显物体,对其分别通过傅里叶变换红外光谱仪30扫描化学成像得到温度特征与可视化相机20拍照成像得到图像特征,观察化学成像温度特征与可视化成像图像特征的偏差,通过算法移动化学成像温度特征显示的像素位置,将两幅图像拉至重合,即对视差进行了校准,达到准确定位痕量物质的目的,有效释放了光学结构的加工精度和装调难度,有利于实现工程化生产;并且采用移动像素校准视差的方法,可以广泛应用于其它领域;如疫情期间公共场所体温筛查,红外测温相机存在人脸识别准确度低,保存的图像人员身份难以辨识等问题。因此利用可见光图像进行人脸识别,本发明中移动目标像素的方法可使可见光图像与红外图像中人脸的位置重合,并在可见光图像中进行人脸与体温显示。
[0057]
在上述实施例中,对各个实施例的描述都各有侧重,某个实施例中没有详述的部分,可以参见其他实施例的相关描述。
[0058]
以上对本发明实施例所提供的技术方案进行了详细介绍,本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1