一种适用于GIS/GIL的自动配准式X光检测机械臂及其配准方法与流程
一种适用于gis/gil的自动配准式x光检测机械臂及其配准方法
技术领域
1.本发明涉及输变电设备智能运维技术领域,更具体地,涉及一种适用于gis/gil的自动配准式x光检测机械臂。
背景技术:
2.随着电网建设的发展,变电站建设中使用气体绝缘全封闭组合电器(gas insulated switchgear,简称gis)、气体绝缘金属封闭输电线路(gas insulated transmission lines,简称gil)、罐式断路器等sf6电力设备的情况越来越多。gis内部任何缺陷和故障的存在都可能影响设备整体性能,可能影响到相邻设备的正常工作以及服务范围的正常用电。而大型电力设备gis、罐式断路器体形庞大、现场环境复杂原因,一旦出现事故进行停电检修时就需要投入大量的人力、物力、财力和时间。gis的故障类型有sf6气体漏气、本体绝缘缺陷、断路器缺陷、隔离开关缺陷、操作结构缺陷和接地开关缺陷等,大部分严重事故,未能通过现有的检测手段在缺陷发展初期被发现,导致击穿、烧损等严重事故的发生。另外,部分运行时间较长的组合电器设备,如10年以上的老旧gis电力设备,进入了故障高发期,容易出现隔离刀闸分合闸不到位、结构移位、部件脱落、异物、部件裂纹等结构性缺陷。
3.gis x射线数字成像现场试验是检测gis内部机械、绝缘缺陷隐患的一项新技术,能够在不停电、不解体的情况下,准确及时的掌握设备内部机械结构状态信息,发现设备内部的机械结构缺陷。通过对电力设备进行多方位x射线透视成像,配合专用的图像处理与识别技术,实现其内部结构的“可视化”与运行状态的快速诊断,可极大地提高设备故障定位与判别的准确性。gis x射线数字成像不仅对x射线装置性能要求高,对检测人员综合能力、安全操作意识要求更高。
4.公开号为(cn205175929u)的专利提出一种组合式x射线智能无损检测移动平台,包括x射线发射器移动平台和平板探测器移动平台两大部分,两移动平台底部均为智能小车,提高了现场设备无损检测的效率和成功率,可明显节约时间和人力,但在两平台之间无法自动完成从x射线发射器发射口到平板探测器中心快速对准;
5.公开号为(cn107024491a)的专利提出一种x射线无损检测系统及其检测方法,包括检测终端、x射线机、x射线机车、数字成像板和成像板车,检测终端包括中央控制器、位置调节装置、显示装置和通信装置;
6.以上述专利为代表的电力设备x射线无损检测平台,均由两台小车组成,但不能自动完成从射线发射端到接收端的自动配准。
技术实现要素:
7.为解决现有技术中存在的不足,本发明提供一种适用于gis/gil的自动配准式x光检测机械臂,能够通过远程遥控的方式,控制机械臂调整关节角度,使激光发射单元与激光
接收单元之间实现精确的配准,消除主观手动方法相关的错误余量;同时,通过激光的自动配准保证发射本体和接收板完全配置并清晰成像;并且机械臂的连接件和关节还能够适应不同直径gis/gil的检测。该检测臂能在gis/gil现场x光检测中大大降低现场检测人员配置、缩短检测时间、提高检测效率,作业场合适用性更广。
8.本发明采用如下的技术方案。
9.本发明提供一种适用于gis/gil的自动配准式x光检测机械臂,包括基座、发射本体、第一连接件、第一关节、第三关节、第四连接件、接收板;
10.第一关节与第三关节之间存在多组关节及连接件,且连接件上设有第一摄像头;第一连接件与第一关节相连;第四连接件与第三关节相连;第四连接件上设置第二摄像头、激光接收单元,激光接收单元上设置二维激光参考靶、激光照射点,第四连接件下方设置接收板;第一连接件上设置激光发射窗口,其下方依次设置发射本体、基座;基座能够固定连接在gis/gil的支撑平台上。
11.进一步地,所述多组关节及连接件包括第二关节、第二连接件和第三连接件;所述第一连接件上设有激光发射单元,当从激光发射单元上的激光发射窗口发射出的激光路径照射到第四连接件上的二维激光参考靶正中心时,发射本体和接收板为配准状态。
12.进一步地,所述发射本体包括发射源窗口;
13.所述基座和第一连接件分别固定在发射本体的正下方和正上方,且均与发射本体为刚性连接,保证发射源窗口和激光发射窗口朝向一致。
14.进一步地,所述机械臂上的第一连接件、第二连接件、第三连接件和第四连接件和第一关节、第三关节以第二关节为中心整体上采用对称结构布置,其中第一连接件和第四连接件长度相同,第二连接件和第三连接件长度相同,第一关节、第二关节、第三关节均能够完成任意角度旋转;第一关节(4)、第二关节(6)、第三关节(8)的旋转角度变化,使机械臂能够具有展开状态和折叠状态。
15.进一步地,所述第一摄像头和第二摄像头,均为全视野云台摄像头。
16.进一步地,所述发射本体、接收板、激光发射单元、激光接收单元、第一连接件、第二连接件、第三连接件、第四连接件、第一关节、第二关节、第三关节均采用一体化电源设计方式,由特种锂电池及电源管理系统提供能量。
17.本发明还提供一种x射线dr成像系统包括数字图像处理系统和所述适用于gis/gil的自动配准式x光检测机械臂;
18.接收板位于第四连接件下方,且保持接收板垂直,发射本体是便携式脉冲x光机,数字图像处理系统与接收板之间可采用有线或无线连接方式。
19.进一步地,机械臂配准过程中步骤如下:
20.粗调第一关节、第三关节以及第一关节与第三关节之间的关节,粗调过程中通过第一摄像头和第二摄像头查看机械臂空间位置,避免误碰gis/gil设备;
21.通过第二摄像头观察激光路径上是否有遮挡,如有遮挡需要重新调整机械臂姿态;
22.根据激光照射点在二维激光参考靶上的xy位置偏差来微调第一关节、第三关节以及第一关节与第三关节之间的关节,使激光发射窗口射出激光路径对应的激光照射点位于二维激光参考靶正中心,完成配准。
23.进一步地,所述激光发射单元和激光接收单元采用对准激光系统,能够对可见的激光路径上任何点实时动态测量xy偏差;
24.激光接收单元与中央处理单元相连接,通过中央处理单元可实时对xy偏差进行读数。
25.进一步地,所述机械臂通过后台远程遥控方式调整关节角度;
26.所述二维激光参考靶可将靶盘上激光位置无线传输到后台进行监控,随着关节角度调整实时监测激光路径变化;
27.x光拍摄采用无线式数字图像处理系统,可远程遥控拍摄并在后台分析系统上进行快速数字化成像。
28.本发明的有益效果在于,与现有技术相比:
29.1.本发明根据激光照射点在二维激光参考靶上的xy位置偏差来调节机械臂的三个关节,使激光发射窗口射出激光路径对应的激光照射点位于二维激光参考靶正中心,完成自动配准,消除主观手动方法相关的错误余量;
30.2.现场x光检测操作中受设备厚度和工装角度影响,发射本体和接收板对准和间距调整非常不便、大规模检测效率低,通过上述用机械臂上的多个关节联合调整的激光配准方式可以调整确定发射本体和接收板之间角度以及发射本体和接收板之间距离,配准后可直接进行x光检测,保证接收板清晰成像;
31.3.x光检测仪器笨重,而gis气室设置复杂,常规依靠人员搬抬不适用于大规模检测,依靠工装固定不适合移动和调整,因此本发明中,通过机械臂搭载x射线dr成像系统的发射本体和接收板,省去人力搬抬操作,对于高位、低位、竖直气室可灵活采取不同的机械臂姿态,能够大大降低现场检测人员的配置、缩短检测时间、提高检测效率,作业场合适用性更广;
32.4.由于gis/gil现场x光检测操作易产生辐射泄漏,并不安全,因此本发明中,采用了远程遥控的方式,控制机械臂调整关节角度、控制dr成像系统拍摄成像、对激光配准路径进行监视,检测人员只需远端操作后台主机或分析系统,保证现场检测人员安全;
33.5.现场x光检测时,dr成像系统通常需要220v供电电源进行驱动,电源断开后还需要重新预热训机,这对现场检测位置的移动调整带来极大不便,因此本发明中,将包括dr成像、激光配准、机械臂转动连接部件在内均采用一体化电源设计方式,由特种锂电池及电源管理系统提供能量,并进行连续供电,保证其在现场检测时的效率。
附图说明
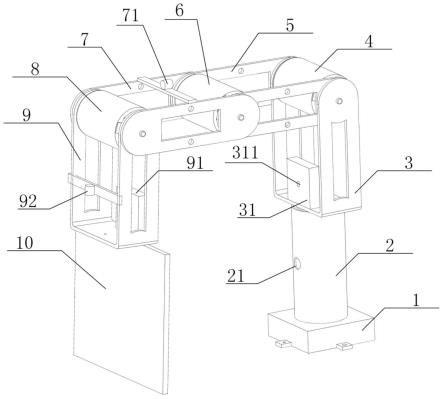
34.图1是本发明的一个实施例中一种适用于gis/gil的自动配准式x光检测机械臂的结构示意图;
35.图2是本发明的一个实施例中一种适用于gis/gil的自动配准式x光检测机械臂的二维激光参考靶结构示意图。
36.图1至2中附图标记说明如下:
37.1-基座;2-发射本体;3-第一连接件;4-第一关节;5-第二连接件;6-第二关节;7-第三连接件;8-第三关节;9-第四连接件;10-接收板;
38.21-发射源窗口;31-激光发射单元;71-第一摄像头;91-激光接收单元;92-第二摄
像头;
39.311-激光发射窗口;911-二维激光参考靶;912-激光照射点。
具体实施方式
40.为使本发明的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明的技术方案进行清楚、完整地描述。本技术所描述的实施例仅仅是本发明一部分的实施例,而不是全部实施例。基于本发明精神,本领域普通技术人员在没有作出创造性劳动前提下所获得的有所其它实施例,都属于本发明的保护范围。
41.在本专利的描述中,需要理解的是,术语“中心”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本专利和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本专利的限制。
42.如图1所示,一种适用于gis/gil的自动配准式x光检测机械臂的结构示意图,包括基座1、发射本体2、第一连接件3、第一关节4、第二连接件5、第二关节6、第三连接件7、第三关节8、第四连接件9、接收板10,发射本体2包括发射源窗口21,第一连接件3包括激光发射单元31,激光发射单元31包括激光发射窗口311,第三连接件7包括第一摄像头71,第四连接件9包括激光接收单元91、第二摄像头92;
43.如图2所示,一种适用于gis/gil的自动配准式x光检测机械臂的二维激光参考靶结构示意图,激光接收单元91包括二维激光参考靶911、激光照射点912。
44.其中基座1位于机械臂的底部,且基座1外表面位于下方位置设有螺栓连接孔;
45.基座1的上方设有发射本体2,发射本体2为圆柱结构,并设有发射源窗口21;
46.发射本体2的上方设有第一连接件3,第一连接件3上设有激光发射单元31,发射单元31中间开设激光发射窗口311;
47.第一连接件3的上方为第二连接件5,第二连接件5的内部设有第一关节4,且第一关节4的两端通过第二连接件5上的螺栓连接孔进行固定;
48.第二连接件5一端的螺栓连接孔与第三连接件7相对一端的螺栓连接孔对齐,以螺栓连接方式固定,且固定处内部设有第二关节6;
49.第三连接件7的另一端设有第三关节8,第三连接件7的上方设有第一摄像头71;
50.第三关节8的下方设有第四连接件9,第四连接件9一侧设有二维激光参考靶91,参考靶91上设有二维激光参考靶911、激光照射点912;另一侧设有第二摄像头92;
51.第四连接件9的下方设有接收板10,且接收板10的高度与基座1和发射本体2的叠加高度相等。
52.当从激光发射单元31上的激光发射窗口311发射出的激光路径照射到激光接收单元上的二维激光参考靶911正中心时(如图2所示),发射本体2和接收板10为配准状态。
53.基座1上靠近下方的位置设有螺栓连接孔,为机械臂的连接位置,能够以螺栓连接方式固定在支撑平台上;
54.通常支撑平台还会具有移动功能,带动机械臂完成水平旋转、垂直旋转、升降等移动功能。对于高位的gis气室,可将机械臂竖直转180
°
后由下向上移动到气室两侧进行检测;对于低位gis气室,可将机械臂由上向下移动到气室两侧进行检测;对于竖直gis气室,
将机械臂竖直转90
°
后,由侧方移动到气室两侧进行检测。支撑平台可以是固定式底座,也开始采用轮式、履带式、轮腿式、腿足式等多种方式中任一种的移动底盘。对于高位、低位、竖直气室可灵活采取不同的机械臂姿态,能够大大降低现场检测人员的配置、缩短检测时间、提高检测效率,作业场合适用性更广,解决了人工配准费时费力的问题。
55.基座1和第一连接件3分别固定在发射本体2的正下方和正上方,且均与发射本体2为刚性连接,保证发射源窗口21和激光发射窗口311朝向一致。
56.机械臂上四个连接件和三个关节以第二关节6为中心整体上采用对称结构布置,其中第一连接件3和第四连接件9长度相同,第二连接件5和第三连接件7长度相同,第一关节4、第二关节6、第三关节8的尺寸和型号完全相同且均能够完成任意角度旋转;
57.第一关节4、第二关节6、第三关节8的旋转角度变化,使机械臂能够完成展开状态和折叠状态。
58.该机械臂为gis/gil检测专用,考虑到被检设备的圆柱形结构,直径通常为500-1000mm不等,所以机械臂上的若干连接件和关节解决了x光透照距离可调的问题。
59.第三连接件7和第四连接件9上分别设置有第一摄像头71和第二摄像头91,均为全视野云台摄像头,可以远程查看机械臂周围环境,避免机械臂移动过程中误碰周围设备。
60.一种x射线dr成像系统包括数字图像处理系统和所述的适用于gis/gil的自动配准式x光检测机械臂,接收板10位于第四连接件9下方,与第四连接件9刚性连接且保持接收板10垂直,接收板10为数字平板非晶硅型探测器,探测器有效成像范围为35
×
43cm,探测器像素间距为140μm。发射本体2是便携式脉冲x光机,最大能量320kv,x射线源尺寸为3mm,管电流5ma,射线辐射角度40
°
,x射线脉冲宽度50ns。
61.数字图像处理系统与接收板10之间可采用有线或无线连接方式,按照gis设备内部检测应用场景,功能包括几何尺寸测量、图片存储、图片查询、图像放大、缩小、亮度/对比度调节、图像增强、图像锐化、边缘增强及负像等功能,软件环境采用windows7。
62.机械臂配准过程中步骤如下:
63.粗调第一关节4、第二关节6、第三关节8,使三者呈等腰三角形位置分布,粗调过程中通过第一摄像头71和第二摄像头92查看机械臂空间位置,避免误碰gis/gil设备;
64.通过第二摄像头92观察激光路径上是否有遮挡,如有遮挡需要重新调整机械臂姿态;
65.根据激光照射点912在二维激光参考靶911上的xy位置偏差来微调第一关节52、第二关节54、第三关节56,使激光发射窗口311射出激光路径对应的激光照射点912位于二维激光参考靶911正中心,完成配准。
66.激光发射单元31和激光接收单元91采用的是ot-4040型对准激光系统,能够对可见的激光路径上任何点实时动态测量xy偏差。激光接收单元91与中央处理单元相连接,通过中央处理单元可实时对xy偏差进行读数。ot-4040在最远300英尺的距离上可提供0.001英寸的分辨率,光纤耦合激光二极管传输系统具有良好的光束相干性。
67.更为具体地,激光发射单元31采用ot-4040ll型对准激光器,激光接收单元91采用ot-4040tts4型透明靶并与ot-4040型中央处理单元相连接(通常每个靶配置一个中央处理单元)。
68.激光脉冲频率为10hz,目标完全不受环境光的影响。激光光束直径8mm,二维激光
参考靶911的有效传感区域直径为25mm,有效区域大,可轻松将目标放置到激光参考路径中。
69.采用激光配准的优势在于能够使激光发射单元与激光接收单元之间、x光发射单元与接收板之间实现超精确的配准,消除主观手动方法相关的错误余量;
70.同时测量速度更快,减少安装工装与人工手动调整耗时,提高检测效率;
71.由于激光配准射程已近百米,因此在常用gis设备直径尺寸范围内(一般直径不超过1m),都能达到良好的配准效果,完全满足现场应用;
72.采用激光配准原理,能够满足多点、动态、同步、直观的测量需求;激光路径的xy位置数据可以通过后台计算机进行监视,存储和分析,便于实现远程遥控操作,保证检测人工现场安全。
73.机械臂上包括发射本体2、接收板10、激光发射单元31、激光接收单元91、第一连接件3、第二连接件5、第三连接件7、第四连接件9、第一关节4、第二关节6、第三关节8均采用一体化电源设计方式,由特种锂电池及电源管理系统提供能量。
74.机械臂通过后台远程遥控方式调整关节角度。二维激光参考靶911可将靶盘上激光位置无线传输到后台进行监控,随着关节角度调整实时监测激光路径变化。x光拍摄采用无线式数字图像处理系统,可远程遥控拍摄并在后台分析系统上进行快速数字化成像。此外,支撑平台的升降、旋转、移动操作均可通过远程遥控实现。
75.本发明的有益效果在于,与现有技术相比:
76.1.本发明根据激光照射点在二维激光参考靶上的xy位置偏差来调节机械臂的三个关节,使激光发射窗口射出激光路径对应的激光照射点位于二维激光参考靶正中心,完成自动配准,消除主观手动方法相关的错误余量;
77.2.现场x光检测操作中受设备厚度和工装角度影响,发射本体和接收板对准和间距调整非常不便、大规模检测效率低,通过上述用机械臂上的多个关节联合调整的激光配准方式可以调整确定发射本体和接收板之间角度以及发射本体和接收板之间距离,配准后可直接进行x光检测,保证接收板清晰成像;
78.3.x光检测仪器笨重,而gis气室设置复杂,常规依靠人员搬抬不适用于大规模检测,依靠工装固定不适合移动和调整,因此本发明中,通过机械臂搭载x射线dr成像系统的发射本体和接收板,省去人力搬抬操作,对于高位、低位、竖直气室可灵活采取不同的机械臂姿态,能够大大降低现场检测人员的配置、缩短检测时间、提高检测效率,作业场合适用性更广;
79.4.由于gis/gil现场x光检测操作易产生辐射泄漏,并不安全,因此本发明中,采用了远程遥控的方式,控制机械臂调整关节角度、控制dr成像系统拍摄成像、对激光配准路径进行监视,检测人员只需远端操作后台主机或分析系统,保证现场检测人员安全;
80.5.现场x光检测时,dr成像系统通常需要220v供电电源进行驱动,电源断开后还需要重新预热训机,这对现场检测位置的移动调整带来极大不便,因此本发明中,将包括dr成像、激光配准、机械臂转动连接部件在内均采用一体化电源设计方式,由特种锂电池及电源管理系统提供能量,并进行连续供电,保证其在现场检测时的效率。
81.最后应当说明的是,以上实施例仅用以说明本发明的技术方案而非对其限制,尽管参照上述实施例对本发明进行了详细的说明,所属领域的普通技术人员应当理解:依然
可以对本发明的具体实施方式进行修改或者等同替换,而未脱离本发明精神和范围的任何修改或者等同替换,其均应涵盖在本发明的权利要求保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1