基于雷视结合的桥梁拉索索力测量方法、装置及设备与流程
本发明涉及桥梁健康监测,具体涉及一种基于雷视结合的桥梁拉索索力测量方法、装置及设备。
背景技术:
1、斜拉桥跨度大、造型美观,在大跨度桥梁建设中占据主导地位。由于拉索是保证斜拉桥整体结构完整性和安全性的最关键的结构部件之一,因此,便携、快速的拉索索力估算在桥梁健康监测中具有非常重要的现实意义。
2、索力测量主要分为接触式和非接触式测量两种,传统的索力测量为接触式,需要人工布置传感器,费时费力、难以快速测试。近年来,随着非接触式测量技术的发展,如基于机器视觉和基于微波雷达的拉索索力测量等创新技术,被相继开发出来并在实际项目上得到应用。
3、基于视觉的拉索索力测量,由于要求高精度捕获拉索振动位移,需要使用长焦镜头对准关注区域,导致视场变小,每次只能测一根或很少量的索。另外,从拉索振动曲线中获得各阶频率需要积累一定时间的数据。对于拉索较多的桥梁而言,要实现所有拉索的测量,效率偏低。
4、形变监测微波测量是一种全新的非接触式斜拉索振动测试方法,它是通过发射和接收雷达波来测量拉索的频率等振动特性参数,从而得出拉索索力。其优点为:测量效率高,可同时实现多个目标的同时测量;相应速度快、精度高等。但微波雷达在索力测量过程中需要多次繁琐的人机交互,如人工选择观测点、人工确认拉索编号以及人工读取拉索基频等。过多的人机交互,无法有效发挥雷达的高效优势、费时费力;此外,交互多对操作人员也提出了较高的技能要求。
技术实现思路
1、针对现有技术中存在的缺陷,本发明的目的在于提供一种基于雷视结合的桥梁拉索索力测量方法、装置及设备,能够解决现有技术中视频监测效率低下,雷达监测需要人工确认编号,费时费力的问题。
2、为达到以上目的,本发明采取的技术方案是:
3、本发明提供一种基于雷视结合的桥梁拉索索力测量方法,包括以下步骤:
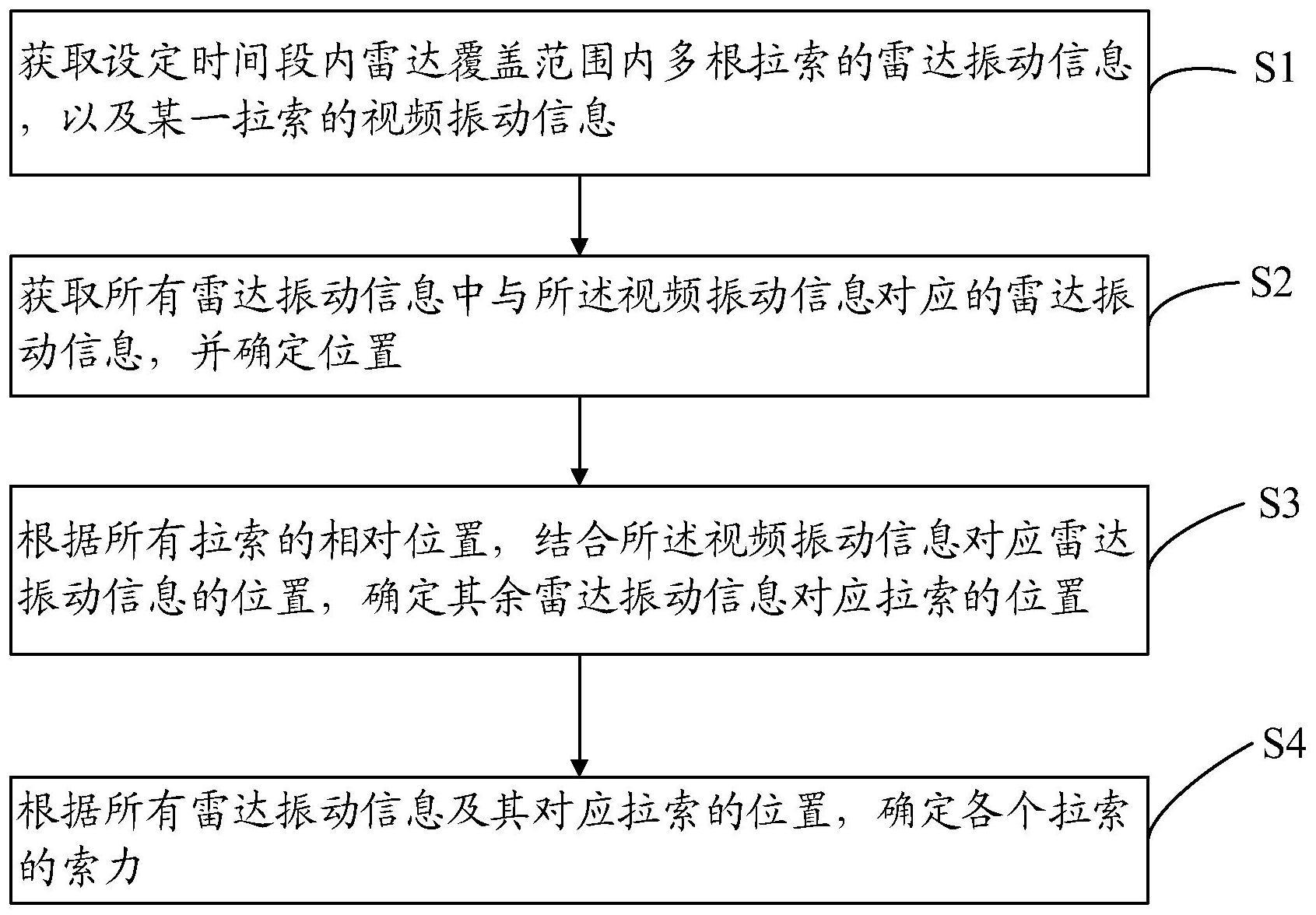
4、获取设定时间段内雷达覆盖范围内多根拉索的雷达振动信息,以及某一拉索的视频振动信息;
5、获取所有雷达振动信息中与所述视频振动信息对应的雷达振动信息,并确定位置;
6、根据所有拉索的相对位置,结合所述视频振动信息对应雷达振动信息的位置,确定其余雷达振动信息对应拉索的位置;
7、根据所有雷达振动信息及其对应拉索的位置,确定各个拉索的索力。
8、在一些可选的方案中,获取设定时间段内雷达覆盖范围内某一拉索的视频振动信息,包括:
9、获取用摄像头对该拉索拍摄提取的视频信号;
10、对图视频信号的每一帧进行处理得到,拉索设定长度处边缘每一帧的两条直线方程;
11、取每一帧两条直线方程中相同横坐标的对应的纵坐标,得到该点对应的第一振动位移时间序列。
12、在一些可选的方案中,获取设定时间段内雷达覆盖范围内多根拉索的雷达振动信息,包括:
13、获取雷达在设定区域的初始反射回波强度曲线;
14、对初始反射回波强度曲线进行降噪后得到降噪反射回波强度曲线;
15、对降噪反射回波强度曲线中选出峰值点;
16、提取所有峰值点位置处的第二振动位移时间序列。
17、在一些可选的方案中,所述的对初始反射回波强度曲线进行降噪后得到降噪反射回波强度曲线,包括:
18、对初始反射回波强度曲线分段处理,得到分段反射回波强度曲线;
19、对分段反射回波强度曲线分段拟合去除干扰信号后,在拼接得到降噪反射回波强度曲线。
20、在一些可选的方案中,所述的对降噪反射回波强度曲线中选出峰值点,包括:
21、对降噪反射回波强度曲线进行等间距差分处理,得到差分序列;
22、根据差分序列中的峰值选出候选峰值点;
23、将所有的候选峰值点排序后,剔除靠前设定个数候选峰值点设定半径的内的其他候选峰值点,得到最终的峰值点。
24、在一些可选的方案中,获取所有雷达振动信息中与所述视频振动信息对应的雷达振动信息,并确定位置,包括:
25、采用动态时间弯曲算法,将第一振动位移时间序列与所有第二振动位移时间序列进行匹配;
26、调整第一振动位移时间序列与各个第二振动位移时间序列中不同的时间点之间的对应关系,获取各个第二振动位移时间序列的最小总路径;
27、所有最小总路径中的最小值对应的第二振动位移时间序列,即为与第一振动位移时间序列对应的第二振动位移时间序列。
28、在一些可选的方案中,所述的根据所有雷达振动信息及其对应拉索的位置,确定各个拉索的索力,包括:
29、将所有拉索对应的第二振动位移时间序列,进行傅里叶变化,得到频谱序列;
30、将相邻阶的频率差进行聚类分类,得到拉索的振动基频;
31、根据拉索的振动基频,确定拉索的索力。
32、在一些可选的方案中,所述的根据所有拉索的相对位置,结合所述视频振动信息对应雷达振动信息的位置,确定其余雷达振动信息对应拉索的位置,包括:
33、根据所述视频振动信息对应斜拉索的位置,确定雷达振动信息中与视频振动信息对应斜拉索的位置;
34、根据所有拉索的相对位置,以及与视频振动信息对应斜拉索的位置,确定其余雷达振动信息对应拉索的位置。
35、另一方面,本发明还提供一种基于雷视结合的桥梁拉索索力测量装置,包括:
36、振动信息获取模块,其用于获取设定时间段内雷达覆盖范围内多根拉索的雷达振动信息,以及某一拉索的视频振动信息;
37、振动信息匹配模块,其用于获取所有雷达振动信息中与所述视频振动信息对应的雷达振动信息,并确定位置;
38、雷达信息位置匹配模块,其用于根据所有拉索的相对位置,结合所述视频振动信息对应雷达振动信息的位置,确定其余雷达振动信息对应拉索的位置;
39、索力确定模块,其用于根据所有雷达振动信息及其对应拉索的位置,确定各个拉索的索力。
40、还有一方面,本发明还提供一种计算机设备,所述计算机设备包括处理器、存储器、以及存储在所述存储器上并可被所述处理器执行的计算机程序,其中所述计算机程序被所述处理器执行时,实现如权利要求1至8中任一项所述基于雷视结合的桥梁拉索索力测量方法的步骤。
41、与现有技术相比,本发明的优点在于:综上所述,本方案获取设定时间段内雷达覆盖范围内多根拉索的雷达振动信息,以及某一拉索的视频振动信息;获取所有雷达振动信息中与所述视频振动信息对应的雷达振动信息,并确定位置;根据所有拉索的相对位置,结合所述视频振动信息对应雷达振动信息的位置,确定其余雷达振动信息对应拉索的位置;根据所有雷达振动信息及其对应拉索的位置,确定各个拉索的索力。根据视频振动信息对应的拉索位置参数,将视频振动信息与雷达振动信息进行适应性的匹配,获取所有雷达振动信息中与视频振动信息对应的雷达振动信息,并确定位置;根据所有拉索的相对位置,结合视频振动信息对应雷达振动信息的位置,确定其余雷达振动信息对应拉索的位置。匹配成功后,即可获得雷达所测多根拉索的位置信息和编号信息,通过视频监测和雷达监测结合能够解决现有技术中单用视频监测效率低下,单用雷达监测需要人工确认编号,费时费力的问题。
- 还没有人留言评论。精彩留言会获得点赞!