一种基于雷达信息的船舶尺寸估计方法与流程
1.本发明涉及船舶交通管理领域,特别是一种基于雷达信息的船舶尺寸估计方法。
背景技术:
2.我国社会经济蓬勃发展带动了水运业务量的逐年增长,船舶数量急剧增加,这也导致水上交通安全隐患增多等问题。为确保船舶航行安全,我国水上交通管理部门普遍使用船舶交通管理系统(vessel traffic services,vts)来监管辖区范围内的船舶动态。vts将雷达信息与ais信息(automatic identification system,船舶自动识别系统)进行融合,从而获取全面、准确、实时的船舶动态信息。
3.船舶尺寸作为一项水上交通管理部门重点关注的信息一般由ais信息提供。但是对于一些非合作不确定的船舶,水上交通管理部门无法获取其ais信息(非合作船舶故意不开启或者不安装ais设备)。由此可见,针对非合作不确定的船舶,研究仅基于雷达信息来估计其尺寸方法,对我国vts的进一步发展具有至关重要的意义。
技术实现要素:
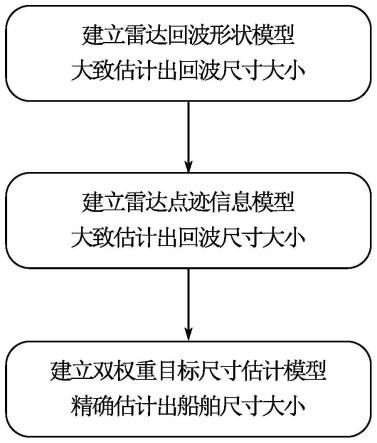
4.本发明要解决的技术问题是针对上述现有技术的不足,而提供一种基于雷达信息的船舶尺寸估计方法,该基于雷达信息的船舶尺寸估计方法利用雷达信息来估计船舶尺寸大小,依次建立雷达回波形状模型、雷达点迹信息模型、目标尺寸估计模型,在复杂水域环境中,实现对船舶尺寸的精确估计,本发明所提出的方法复杂度小、准确度高、适用性广。
5.为解决上述技术问题,本发明采用的技术方案是:
6.一种基于雷达信息的船舶尺寸估计方法,包括如下步骤。
7.步骤1、建立雷达回波形状模型:在复杂水域环境中,基于获取到的雷达回波数据,并根据雷达回波的距离向和方位向,将雷达回波等效为长度为a
shape
、宽度为b
shape
的矩形。
8.步骤2、建立雷达点迹信息模型:在复杂水域环境中,基于获取到的雷达回波数据,并根据雷达回波的点迹信息,将雷达回波等效为长度为a
area
、宽度为b
area
的矩形;其中,雷达回波的点迹信息包括雷达回波的采样距离和采样点个数。
9.步骤3、建立双权重目标尺寸估计模型:在复杂水域环境中,基于雷达回波的形状信息和点迹信息,建立双权重目标尺寸估计模型,从而估计出船舶长度l和船舶宽度w。
10.步骤3中,双权重目标尺寸估计模型的表达式为:
[0011][0012]
式中,r为雷达的最大探测距离。
[0013]
d为船舶到雷达站的距离。
[0014]
l
shape
为基于雷达回波形状信息,估计得到的船舶长度,为关于a
shape
和b
shape
的函
数。
[0015]wshape
为基于雷达回波形状信息,估计得到的船舶宽度,为关于a
shape
和b
shape
的函数。
[0016]
l
area
为基于雷达回波点迹信息,估计得到的船舶长度,为关于a
area
和b
area
的函数。
[0017]warea
为基于雷达回波点迹信息,估计得到的船舶宽度,为关于a
area
和b
area
的函数。
[0018]
l
shape
和w
shape
的函数计算公式为:
[0019][0020][0021]
其中:
[0022][0023][0024][0025]
式中,θ1,θ2为计算过程中的两个角度中间量;
[0026]
λ1为航向角;λ2为步骤1中雷达回波等效矩形的短轴与正北方向的夹角;其中,短轴为与雷达回波等效矩形中与短边平行的对称轴;
[0027]
分别为船舶目标在航向λ1和短轴λ2上的单位向量;
[0028]
k为船舶尺寸的长宽比,为已知的统计计算值。
[0029]
l
area
和w
area
的函数计算公式为:
[0030][0031]
步骤1中,雷达回波形状模型的建立方法,具体包括如下步骤。
[0032]
步骤11、建立极坐标系:将获取到的雷达回波数据绘制在极坐标系ρ-θ中,雷达回波数据在极坐标系中呈类矩形。
[0033]
步骤12、寻找边界点:先选取雷达回波距离向上最近的点a1和最远的点a3;再选取雷达回波方位向上方位最小的点a2和方位最大的点a4;接着,将四个边界点a1、a2、a3、a4的极坐标均转换为平面直角坐标。
[0034]
步骤13、建立内接四边形:将a1、a2、a3、a4四个边界点首位相连,形成为内接四边形;将内接四边形的四条边长中的最大边长设为d2,d2对应边的边长设为d4;另外两条边的边长分别设为d1和d3;根据四个边界点的平面直角坐标,依次计算得到d1、d2、d3和d3。
[0035]
步骤14、构建近似矩形:将步骤13建立的内接四边形,构建最为近似的矩形a;矩形
a 构建时,以边长d2和d4的中点连线、边长d1和d3的中点连线,分别为矩形a的两条对称轴;设矩形a的长边长度为a
shape
,短边长度为b
shape
。
[0036]
步骤15、计算a
shape
和b
shape
,具体计算公式为:
[0037][0038]
步骤2中,雷达点迹信息模型的建立方法,具体包括如下步骤。
[0039]
步骤21、确定采样距离:确定雷达在当前工作模式下的采样距离samplingdis。
[0040]
步骤22、计算采样点个数:计算雷达回波包含的采样点个数samplingnum。
[0041]
步骤23、计算点迹面积s,具体计算公式为:
[0042]
s=samplingdis
·
samplingnum
[0043]
步骤24、计算a
area
和b
area
:将雷达回波近似成矩形b,设矩形b的长边长度为a
area
,短边长度为b
area
;则:
[0044][0045]
基于船舶尺寸的长宽比k和雷达回波的点迹面积s,得到a
area
和b
area
。
[0046]
本发明具有如下有益效果:
[0047]
1、本发明所提出的雷达回波形状模型和点迹信息模型,充分利用了回波距离向、方位向、采样距离、采样点个数等多方面信息,信息考虑全面,模型适用性广。
[0048]
2、本发明所提出的目标尺寸估计模型,能够充分考虑船舶目标距离,航向等因素的影响,基于雷达回波形状和点迹信息两个不同的维度去确定船舶尺寸大小,准确度高。
附图说明
[0049]
图1显示了本发明一种基于雷达信息的船舶尺寸估计方法的流程示意图。
[0050]
图2显示了本发明中使用的坐标系示意图。
[0051]
图3显示了本发明提出的雷达回波形状模型示意图。
[0052]
图4显示了本发明中基于船舶航向对回波尺寸进行修正的示意图。
具体实施方式
[0053]
下面结合附图和具体较佳实施方式对本发明作进一步详细的说明。
[0054]
本发明的描述中,需要理解的是,术语“左侧”、“右侧”、“上部”、“下部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,“第一”、“第二”等并不表示零部件的重要程度,因此不能理解为对本发明的限制。本实施例中采用的具体尺寸只是为了举例说明技术方案,并不限制本发明的保护范围。
[0055]
如图1所示,一种基于雷达信息的船舶尺寸估计方法,包括如下步骤。
[0056]
步骤1、建立雷达回波形状模型:在复杂水域环境中,基于获取到的雷达回波数据,并根据雷达回波的距离向和方位向,将雷达回波等效为长度为a
shape
、宽度为b
shape
的矩形。
[0057]
上述雷达回波形状模型的建立方法,具体包括如下步骤。
[0058]
步骤11、建立极坐标系:将获取到的雷达回波数据绘制在如图2所示的极坐标系ρ-θ中,雷达回波数据在极坐标系中呈类矩形。
[0059]
步骤12、寻找边界点:先选取雷达回波距离向上最近的点a1和最远的点a3;再选取雷达回波方位向上方位最小的点a2和方位最大的点a4;接着,将四个边界点a1、a2、a3、a4的极坐标均转换为平面直角坐标。
[0060]
上述距离向是指雷达向外发射脉冲的方向,方位向是指雷达脉冲方位变化的方向。
[0061]
步骤13、建立内接四边形:将a1、a2、a3、a4四个边界点首位相连,形成为内接四边形;将内接四边形的四条边长中的最大边长设为d2,d2对应边的边长设为d4;另外两条边的边长分别设为d1和d3;根据四个边界点的平面直角坐标,依次计算得到d1、d2、d3和d3。
[0062]
步骤14、构建近似矩形:将步骤13建立的内接四边形,构建最为近似的矩形a;矩形a 构建时,以边长d2和d4的中点连线、边长d1和d3的中点连线,分别为矩形a的两条对称轴,其中较长的对称轴为矩形a的长轴,较短的对称轴为矩形a的短轴;设矩形a的长边长度为 a
shape
,短边长度为b
shape
。
[0063]
步骤15、计算a
shape
和b
shape
,具体计算公式为:
[0064][0065]
步骤2、建立雷达点迹信息模型
[0066]
在复杂水域环境中,基于获取到的雷达回波数据,并根据雷达回波的点迹信息,将雷达回波等效为长度为a
area
、宽度为b
area
的矩形;其中,雷达回波的点迹信息包括雷达回波的采样距离和采样点个数。
[0067]
上述雷达点迹信息模型的建立方法,优选具体包括如下步骤。
[0068]
步骤21、确定采样距离:确定雷达在当前工作模式下的采样距离samplingdis。
[0069]
步骤22、计算采样点个数:计算雷达回波包含的采样点个数samplingnum,其中计算方法为现有技术,这里不再赘述。
[0070]
步骤23、计算点迹面积s,具体计算公式为:
[0071]
s=samplingdis
·
samplingnum
[0072]
步骤24、计算a
area
和b
area
:将雷达回波近似成矩形b,设矩形b的长边长度为a
area
,短边长度为b
area
;则:
[0073][0074]
基于船舶尺寸的长宽比k和雷达回波的点迹面积s,得到a
area
和b
area
。
[0075]
步骤3、建立双权重目标尺寸估计模型
[0076]
在复杂水域环境中,基于雷达回波的形状信息和点迹信息,建立双权重目标尺寸估计模型,从而估计出船舶长度l和船舶宽度w。
[0077]
由于雷达回波方位展宽等因素的影响,船舶离雷达站越远其回波越大,通过雷达点迹信息估计出的船舶尺寸就越不准确,所以船舶离雷达站越远,点迹信息模型的权重就应该越小,于是基于雷达的最大探测距离r和船舶到雷达站的距离d,因而上述双权重目标尺寸估计模型的表达式为:
[0078][0079]
式中,r为雷达的最大探测距离。
[0080]
d为船舶到雷达站的距离。
[0081]
l
shape
为基于雷达回波形状信息,估计得到的船舶长度,为关于a
shape
和b
shape
的函数。
[0082]wshape
为基于雷达回波形状信息,估计得到的船舶宽度,为关于a
shape
和b
shape
的函数。
[0083]
l
area
为基于雷达回波点迹信息,估计得到的船舶长度,为关于a
area
和b
area
的函数。
[0084]warea
为基于雷达回波点迹信息,估计得到的船舶宽度,为关于a
area
和b
area
的函数。
[0085]
l
shap
e和w
shape
的函数计算公式为:
[0086][0087][0088]
其中:
[0089][0090][0091][0092]
[0093]
式中,θ1,θ2为计算过程中的两个角度中间量。
[0094]
λ1为航向角;λ2为步骤1中雷达回波等效矩形(矩形a)的短轴与正北方向的夹角;其中,短轴为与雷达回波等效矩形中与短边平行的对称轴。
[0095]
分别为船舶目标在航向λ1和短轴λ2上的单位向量;
[0096]
k为船舶尺寸的长宽比,为已知的统计计算值,通过从海事船舶数据库里的大量船舶静态数据(10000艘船舶以上)提取出每艘船舶的长度和宽度,计算出每艘船舶的长宽比并取平均值得到。
[0097]
l
area
和w
area
的函数计算公式为:
[0098][0099]
由于雷达回波形状受方位展宽等因素的影响,步骤1中估计出的矩形的长和宽不能代表船舶的长和宽,所以需要基于船舶航向、船舶尺寸长宽比对其进行进一步修正,如图3所示。当船舶为静态目标时(静止不动,没有航向信息),则不需要修正。
[0100]
以上详细描述了本发明的优选实施方式,但是,本发明并不限于上述实施方式中的具体细节,在本发明的技术构思范围内,可以对本发明的技术方案进行多种等同变换,这些等同变换均属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1