一种高精度便携式声源测量定位装置及方法
1.本发明属于声源探测及定位领域,具体涉及一种高精度便携式声源测量定位装置及其方法。
背景技术:
2.声音是自然界的重要元素之一,同时人们生活中的各种社会活动与声音密不可分,它不仅是人与人交流的媒介也是人们生产生活的重要载体。随着人类社会的飞速发展,人们迎来了信息时代,然而信息主要有视频、音频等构成,生活中的手机、电视、电脑等均与声信号息息相关。生活中的电子产品对声信号的利用主要在于声信号的传输、编码、解码等,然而除了电子产品外,声信号的利用还在于抗震救灾、地质勘测、焊接件的探伤等领域,这些领域对声信号的利用则主要是定位问题。
3.目前国内外声源定位检测方法主要分为两大类。一类是将多个麦克风阵列放置到不同的位置进行声源信号的测量,然后根据所测量的数据以及麦克风阵列之间的固定相位及时延信息计算出声源位置;另一类则是利用声信号采集装置进行信号采集后,利用特定算法对采集信号进行运算得到声源位置信息。其中第一类测量方法存在成本较大的缺点,另一方面测量时麦克风阵列与阵列之间的位置摆放对测量精度会有所影响,在确定最优摆放位置时存在一定难度。第二类测量方法主要依赖算法,在采样设备存在偏差时即使算法性能优越也无法实现高精度测量。另一方面,随着环境的日益复杂,出现了大量脉冲冲击噪声,研究表明该类噪声服从alpha稳定分布,故又称alpha噪声。但是现有的两大类方法均只是对采样信号进行常规的噪声滤除,无法消除alpha噪声在测量以及运算中对精度带来的影响。
技术实现要素:
4.本发明提供一种高精度便携式声源测量定位装置及方法,以解决现有技术中alpha噪声难以消除,以及麦克风阵列位置导致误差的问题,通过精确定位声源信号的位置,从而扩展声源定位技术的应用场景。
5.本发明采取的技术方案是:高精度便携式声源测量定位装置包括麦克风线性阵列、信号处理集成模块、数据输出接口、充电接口、充电电池、手柄、屏蔽外壳,其中麦克风线性阵列安装于屏蔽外壳底部用于接收声源信号,数据输出接口一端与信号处理集成模块的存储器相连、安装于屏蔽外壳表面,充电电池固定连接在屏蔽外壳的上方内部,用于给麦克风阵列、信号处理集成模块供电,充电接口一端与可充电电池相连并安装于屏蔽外壳表面,手柄固定连接在屏蔽外壳的顶部。
6.本发明所述信号处理集成模块包括放大、滤波模块、ad转换模块、fpga模块、dsp微处理器模块、存储模块,其中,放大、滤波模块相连一端与麦克风线性阵列相连另一端与ad转换模块相连,对采集的声源信号进行放大和滤波,滤除大部分环境噪声的同时对待测信号进行放大方便后续步骤的进行,将放大、滤波之后的模拟信号转换为数字信号传入fpga
模块,fpga模块用于对数字信号进行标记,以及后续的矩阵特征分解和参数配对,再传入dsp模块用于分数阶累积量的大规模运算。
7.本发明所述麦克风阵列阵列由2m+1个相同结构的麦克风阵元组成,阵元间距为d,且均匀分布在x轴上。
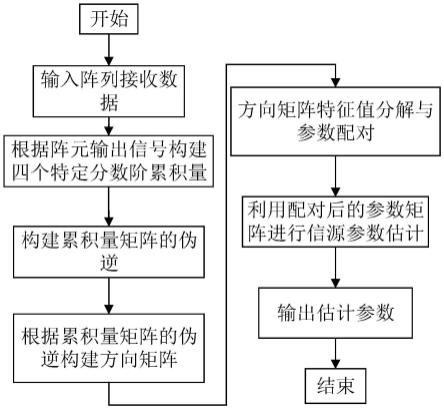
8.本发明声源测量定位方法,包括下列步骤:
9.(1)输入阵列接收数据;
10.(2)根据阵元输出信号构建四个特定分数阶累积量;
11.(3)构建累积量矩阵的伪逆;
12.(4)根据累积量矩阵的伪逆构建方向矩阵;
13.(5)方向矩阵特征值分解与参数配对;
14.(6)利用配对后的参数进行信源位置参数求解;
15.(7)输出信源位置参数:将(6)中得到的位置参数输出到存储模块。
16.本发明所述步骤(1)输入阵列接收数据具体包括装置上电初始化,利用麦克风阵列对噪声环境中的声源信号进行采样,采样信号为sk(t);然后根据阵列模型构建阵列输出模型z(t),在t时刻,第m个麦克风阵元输出的信号可表示为:
[0017][0018]
式中-m≤m≤m,fk为第k个信号的频率,sk(t)为麦克风阵列对第k个信号在t时刻的采样,nm(t)=na(t)+nb(t)为第m个阵元接收到的任意加性噪声,其中na(t)为alpha加性噪声,nb(t)为普通环境噪声,
τmk
为第k个信源在阵元m和0之间的相位差,近似表示如下:
[0019][0020]
其中rk为第k个信源的距离,λk为信号波长且阵元间距满足d≤λk/4,以正中心的麦克风为参考结合采样信号建立麦克风阵列输出模型z(t),写成如下矩阵形式:
[0021]
z(t)=bs(t)+n(t)
[0022]
式中
[0023]
z(t)=[z-m
(t),
…
,z0(t),
…
,zm(t)]
t
[0024]
b=[b1(θ1,r1),
…
,bk(θk,rk)]
[0025][0026][0027]
n(t)=[n-m
(t),
…
,n0(t),
…
,nm(t)]
t
[0028]
其中[
·
]
t
表示矩阵转置,其中s(t)为阵列输入信号矩阵,b为阵列流行,bk(θk,rk)为第k个信号源入射到所有阵元上构成的方向向量,n(t)为环境以及阵列结构等导致的所
有阵元接收到的加性噪声组成的矩阵,θk为第k个信号的方位角,rk为第k个信号的距离。
[0029]
本发明所述步骤(2)中根据分数阶累积量的定义构建如下4p
th
阶累积量:
[0030][0031]
式中,cum
4p
(
·
)表示4p
th
(0《p《1)分数阶累积量,(
·
)
《p》
表示p次幂算子,(
·
)
*
表示矩阵的共轭,通过硬件部分的放大滤波可消除普通环境噪声,通过分数阶累积量的运算可以消除数字信号中的alpha加性噪声,上式可以写成:
[0032][0033]
式中表示信号加权分数阶累积量切片,(
·
)
*
表示矩阵的共轭,且0≤m,n≤m,
[0034][0035]
式中为4p
th
阶左卡普托分数阶微分,γ(
·
)为伽玛函数,将分数阶累积量写为矩阵形式:
[0036][0037]
其中a
p
为m
×
k矩阵,其第k列元素为:
[0038][0039]
由于普通待测信号均为有限带宽即窄带,且对于窄带信号sk(t)≈sk(t+1),将sk(t+1)带入得到如下4p
th
阶累积量:
[0040][0041]
化简为矩阵形式如下:
[0042]
[0043]
其中:
[0044][0045]
同理,定义如下4p
th
阶累积量:
[0046][0047]
表示为矩阵形式有:
[0048][0049]
式中(
·
)h表示矩阵的共轭转置,其中:
[0050][0051]
同理定义如下4p
th
阶累积量:
[0052][0053]
表示为矩阵形式有:
[0054][0055]
其中其中均为m
×
m矩阵,且其秖为k。
[0056]
本发明所述步骤(3)中,设矩阵的伪逆为则:
[0057][0058]
其中ρk为的第k个特征值,uk为对应特征向量,且
[0059]
本发明所述步骤(4)中,设方向矩阵为e1,e2,e3则:
[0060]
[0061][0062][0063]
根据阵列流行与方向矩阵的相关性质易知:
[0064]
e1a
p
=a
p
λ
[0065]
e2a
p
=a
p
ω
[0066]
e3a
p
=a
p
φ。
[0067]
本发明所述步骤(5)中,分解与参数配对包括:分别对e1,e2,e3进行特征值分解得到相应的特征矩阵t1,t2,t3特征向量由于经过了三次独立的特征分解,t1,t2,t3在列向量的排列次序上有差异,即:
[0068]
t1=t2p1=t3p2[0069]
其中p1,p2为k
×
k矩阵,对其进行参数配对以达到排列顺序相同的目的,以矩阵t1为基础,使矩阵t2,t3的各列特征向量与t1排列一致,即可达到使特征值对应的目的,以t1,t2的配对为例,具体方法如下,令:
[0070][0071]
设矩阵p1的第j列中,绝对值最大的元素位于第i行(i,j=1,
…
,k),则t2的第i列向量与的第j列向量相对应,亦即的第i个对角元素与的第j个对角元素相对应,这样便实现了特征值矩阵与的配对,同理可实现与的配对。
[0072]
本发明所述步骤(6)中求解方法是:根据已配对的对角矩阵即可利用下式获取信号doa、距离的具体数值:
[0073][0074][0075]
于是即为待测声源信号的方位角和距离参数。
[0076]
本发明优点在于:本装置体积小轻便可随身携带,可随时调整接收角度方便接收;屏蔽外壳的加持可以降低信号采集过程中的干扰,可充电电池供电可方便装置的续航及维护;通过硬件部分的放大滤波可消除普通环境噪声,分数阶累积量统计工具的能够消除普通滤波环节难以抑制的alpha噪声,通过分数阶累积量的运算可以消除数字信号中的alpha加性噪声,本发明所提供的4p
th
分数阶累积量矩阵的构建,不仅保留了分数阶累积量的线性和半不变性,而且不改变信号的幅值、相位信息,对alpha噪声具有较强的鲁棒性;同时选取不同阵元的映射关系求取分数阶累积量可以增加信号空间信息利用率,从而扩大阵列孔径提高声源定位精度和效率;另外,累积量方向矩阵的特征分解与参数配对进一步提高了算法精度;fpga模块与dsp微处理器模块的组合能够将fpga的硬件并行优势和dsp强大的运算能力相结合最大限度提高计算效率,数据输出接口可使参数读取更加便捷。
附图说明
[0077]
图1是本发明的总体结构示意图;
[0078]
图2是本发明提供的信号处理模块结构示意图;
[0079]
图3是本发明的麦克风线性阵列接收模型简图;
[0080]
图4是本发明的声源信号定位方法流程图。
具体实施方式
[0081]
下面结合附图对本发明的技术方案进行详细说明。
[0082]
如图1所示,高精度便携式声源测量定位装置包括麦克风线性阵列1、信号处理集成模块2、数据输出接口3、充电接口4、充电电池5、手柄6、屏蔽外壳7,其中麦克风线性阵列1安装于屏蔽外壳7底部用于接收声源信号,数据输出接口3一端与信号处理集成模块2的存储器相连、安装于屏蔽外壳7表面,用于与电脑等设备连接即可读取声源位置信息;充电电池5固定连接在屏蔽外壳7的上方内部,用于给麦克风阵列1、信号处理集成模块2供电,充电接口4一端与可充电电池5相连并安装于屏蔽外壳7表面,用于可充电电池5的及时充电,手柄6固定连接在屏蔽外壳7的顶部。
[0083]
如图2所示,所述信号处理集成模块2包括放大、滤波模块、ad转换模块、fpga模块、dsp微处理器模块、存储模块,其中,放大、滤波模块相连一端与麦克风线性阵列相连另一端与ad转换模块相连,对采集的声源信号进行放大和滤波,滤除大部分环境噪声的同时对待测信号进行放大方便后续步骤的进行;ad转换模块由高速ad转换芯片构成,将放大、滤波之后的模拟信号转换为数字信号传入fpga模块,fpga模块用于对数字信号进行标记(根据每个麦克风阵元的位置,对相应的数字信号进行标记),以及后续的矩阵特征分解和参数配对,再传入dsp模块用于分数阶累积量的大规模运算。
[0084]
如图3所示麦克风阵列阵列由2m+1个相同结构的麦克风阵元组成,阵元间距为d,且均匀分布在x轴上,假定k个声源信号入射到上述线性阵列,其中,θk为第k个信号的方位角,rk为第k个信号的距离,在解调到中频并抽样后,第k个信号可表示为为了分析方便且不失一般性,这里假设信号位于xoy平面。
[0085]
如图4所示,本发明声源测量定位方法,包括下列步骤:
[0086]
(1)输入阵列接收数据:具体包括装置上电初始化,利用麦克风阵列对噪声环境中的声源信号进行采样,采样信号为sk(t);然后根据阵列模型构建阵列输出模型z(t),如图3所示,在t时刻,第m个麦克风阵元输出的信号可表示为:
[0087][0088]
式中-m≤m≤m,fk为第k个信号的频率,sk(t)为麦克风阵列对第k个信号在t时刻的采样,nm(t)=na(t)+nb(t)为第m个阵元接收到的任意加性噪声,其中na(t)为alpha加性噪声,nb(t)为普通环境噪声,
τmk
为第k个信源在阵元m和0之间的相位差,近似表示如下:
[0089]
[0090]
其中rk为第k个信源的距离,λk为信号波长且阵元间距满足d≤λk/4,以正中心的麦克风为参考结合采样信号建立麦克风阵列输出模型z(t),写成如下矩阵形式:
[0091]
z(t)=bs(t)+n(t)
[0092]
式中
[0093]
z(t)=[z-m
(t),
…
,z0(t),
…
,zm(t)]
t
[0094]
b=[b1(θ1,r1),
…
,bk(θk,rk)]
[0095][0096][0097]
n(t)=[n-m
(t),
…
,n0(t),
…
,nm(t)]
t
[0098]
其中[
·
]
t
表示矩阵转置,其中s(t)为阵列输入信号矩阵,b为阵列流行,bk(θk,rk)为第k个信号源入射到所有阵元上构成的方向向量,n(t)为环境以及阵列结构等导致的所有阵元接收到的加性噪声组成的矩阵,θk为第k个信号的方位角,rk为第k个信号的距离;
[0099]
(2)根据阵元输出信号构建四个特定分数阶累积量:根据分数阶累积量的定义构建如下4p
th
阶累积量:
[0100][0101]
式中,cum
4p
(
·
)表示4p
th
(0《p《1)分数阶累积量,(
·
)
《p》
表示p次幂算子,(
·
)
*
表示矩阵的共轭,通过硬件部分的放大滤波可消除普通环境噪声,通过分数阶累积量的运算可以消除数字信号中的alpha加性噪声,上式可以写成:
[0102][0103]
式中表示信号加权分数阶累积量切片,(
·
)
*
表示矩阵的共轭,且0≤m,n≤m,
[0104][0105]
式中为4p
th
阶左卡普托分数阶微分,γ(
·
)为伽玛函数,将分数阶累积量写为矩阵形式:
[0106][0107]
其中a
p
为m
×
k矩阵,其第k列元素为:
[0108][0109]
由于普通待测信号均为有限带宽即窄带,且对于窄带信号sk(t)≈sk(t+1),将sk(t+1)带入得到如下4p
th
阶累积量:
[0110][0111]
化简为矩阵形式如下:
[0112][0113]
其中:
[0114][0115]
同理,定义如下4p
th
阶累积量:
[0116][0117]
表示为矩阵形式有:
[0118][0119]
式中(
·
)h表示矩阵的共轭转置,其中:
[0120][0121]
同理定义如下4p
th
阶累积量:
[0122][0123]
表示为矩阵形式有:
[0124][0125]
其中其中均为m
×
m矩阵,且其秖为k;
[0126]
(3)构建累积量矩阵的伪逆:设矩阵的伪逆为则:
[0127][0128]
其中ρk为的第k个特征值,uk为对应特征向量,且
[0129]
(4)根据累积量矩阵的伪逆构建方向矩阵,设方向矩阵为e1,e2,e3则:
[0130][0131][0132][0133]
根据阵列流行与方向矩阵的相关性质易知:
[0134]
e1a
p
=a
p
λ
[0135]
e2a
p
=a
p
ω
[0136]
e3a
p
=a
p
φ
[0137]
(5)方向矩阵特征值分解与参数配对:分别对e1,e2,e3进行特征值分解得到相应的特征矩阵t1,t2,t3特征向量由于经过了三次独立的特征分解,t1,t2,t3在列向量的排列次序上有差异,即:
[0138]
t1=t2p1=t3p2[0139]
其中p1,p2为k
×
k矩阵,对其进行参数配对以达到排列顺序相同的目的,以矩阵t1为基础,使矩阵t2,t3的各列特征向量与t1排列一致,即可达到使特征值对应的目的,以t1,t2的配对为例,具体方法如下,令:
[0140][0141]
设矩阵p1的第j列中,绝对值最大的元素位于第i行(i,j=1,
…
,k),则t2的第i列向量与的第j列向量相对应,亦即的第i个对角元素与的第j个对角元素相对应,这样便实
现了特征值矩阵与的配对,同理可实现与的配对;
[0142]
(6)利用配对后的参数进行信源位置参数求解:根据已配对的对角矩阵即可利用下式获取信号doa、距离的具体数值:
[0143][0144][0145]
于是即为待测声源信号的方位角和距离参数;
[0146]
(7)输出信源位置参数:将(6)中得到的位置参数输出到存储模块。
[0147]
实验例1
[0148]
利用rk1212en音频信号发生器产生一个22vrms(60w)的正弦窄带音频信号作为信号源,即信源数k为1,将其置于本发明提供的高精度生源定位装置近场范围内(按普通声信号波长为17米划分,近场范围小于3倍波长),此处信号发生器分别置于10米、20米、30米、40米、50米处,每个距离处进行不同角度的实测试验,放置角度分别为30度、60度、90度。采用本发明提供的方法进行不同角度以及不同距离的声源位置参数测量绝对误差见表1,表2,其中装置所采用的麦克风阵列阵元间距d为0.5厘米,阵元数m为5个。
[0149]
表1本发明方法实测角度绝对误差
[0150][0151]
表2本发明方法实测距离绝对误差
[0152][0153]
由表1知,当信源方向一定时距离太远信号衰减较为严重测量精度会降低,距离太近时受装置阴影效应的影响精度亦会降低,但总体最低角度测量相对精度在30度50米处为0.54%;由表2知,当信源距离一定时角度太偏测量精度会降低,当声源信号与测量装置的麦克风阵列相向时接收信号最强从而测量精度最高,总体最低距离测量相对精度在30度50米处为0.57%,角度、距离测量误差均能满足大部分日常测量精度需求。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1