一种绝缘子串检测机器人的抗干扰方法与流程
1.本发明涉及绝缘子串检测技术领域,更具体地说,涉及一种绝缘子串检测机器人的抗干扰方法。
背景技术:
2.在电力系统中,绝缘子有两个作用,电气绝缘和机械支撑,其作为输电线路的重要组成部分,在保证电力系统安全运行中发挥着重要作用,绝缘子挂网运行后,长期工作于外界恶劣环境中,如化学腐蚀 ( 污秽,化学气体等 )、温度骤变,导致绝缘子机械及电气性能下降,绝缘子一旦发生故障,极易给电力系统带来严重后果,可能会引起设备的损坏,导致人员伤亡及大规模的断网事故,不良绝缘子是影响电力线路安全运行的重要因素之一,因此,绝缘子故障诊断是一项重要课题,多年来一直受到人们的重视。
3.然而,绝缘子因其安装位置的特殊性及分布区域的广泛性,一直是绝缘子检测的一个难点。因此,目前大部分采用智能的绝缘子串检测机器人可以解决检测难题。绝缘子串检测机器人可以运行在最高
±
800kv电压等级的线路绝缘子串上,检测系统和控制系统的稳定运行离不开可靠的电磁屏蔽设计。由于绝缘子与铁塔一侧和导线一侧间都有电容存在,绝缘子串周围存在沿绝缘子轴对称分布的电场。绝缘子串检测机器人所处的电磁环境极为复杂,为了得到更好的屏蔽效果,需采用一些屏蔽措施,以克服电磁干扰,从而保证绝缘子串检测机器人工作性能以及检测的可靠性和准确性。
技术实现要素:
4.本发明的目的在于克服现有技术中的缺点与不足,提供一种绝缘子串检测机器人的抗干扰方法,该抗干扰方法使得绝缘子串检测机器人具有对高电压等级的电磁屏蔽性能,从而提高绝缘子串检测机器人的抗电磁干扰能力,以保证绝缘子串检测机器人工作性能以及检测的稳定性和准确性。
5.为了达到上述目的,本发明通过下述技术方案予以实现:一种绝缘子串检测机器人的抗干扰方法,将绝缘子串检测机器人的控制壳体设置为至少三层的屏蔽结构,使得控制壳体为电磁屏蔽壳体;在绝缘子串检测机器人的电路板与外界连接的接口处设置光电隔离装置,使得电路板的输入端与外界的输出端实现了电气隔离,同时将光电隔离装置设置在电磁屏蔽壳体内,实现电路板的接口处与外界电磁场隔离;将绝缘子串检测机器人的电路板与控制壳体多点连接,实现电路板与绝缘子串检测机器人共同多点接地,以减少电路板的电磁干扰。
6.在上述方案中,本发明通过将绝缘子串检测机器人的控制壳体设计为多层屏蔽结构,将绝缘子串检测机器人的电路板接口进行光电隔离,以及将绝缘子串检测机器人的电路板接口(即控制系统)和绝缘子串检测机器人整体共地的三个设计克服了电磁干扰的问题,提高了绝缘子串检测机器人对高电压等级的电磁屏蔽性能,从而提高绝缘子串检测机器人的抗电磁干扰能力,以保证绝缘子串检测机器人工作性能以及检测的稳定性和准确
性。
7.所述将绝缘子串检测机器人的控制壳体设置为至少三层的屏蔽结构是指:控制壳体由内层、外层和至少一层中层组成,其中,外层的磁导率小于内层的磁导率,外层的电导率大于内层的电导率,中层为绝缘层。
8.所述内层为铁壳,外层为铜箔或铝箔。
9.所述绝缘层为聚四氟乙烯材料层。
10.所述光电隔离装置包括依次连接的插接端子、光电隔离电路和屏蔽插头;所述插接端子与绝缘子串检测机器人的电路板连接,屏蔽插头用于与外部器件连接;所述屏蔽插头安装在控制壳体上。
11.所述光电隔离电路由光耦芯片op1、稳压二极管d1、滤波电容c1、限流电阻r1、上拉电阻r3和外围电路连接组成。
12.所述屏蔽插头设置有接地引脚一、信号引脚一和电源引脚;所述屏蔽插头的接地引脚一与光电隔离电路的接地端连接,电源引脚与外部电源连接,实现对外部器件供电;所述屏蔽插头的信号引脚一与光耦芯片op1连接;所述稳压二极管d1分别与屏蔽插头的信号引脚一和接地引脚一连接。
13.所述插接端子设置有接地引脚二和信号引脚二,接地引脚二与光电隔离电路的接地端连接,信号引脚二与光耦芯片op1连接。
14.所述将绝缘子串检测机器人的电路板与控制壳体多点连接是指:在控制壳体内部设置若干根导电柱,导电柱与控制壳体的内层相接;绝缘子串检测机器人的电路板穿设在若干根导电柱上,实现与控制壳体多点电连接。
15.所述导电柱为铜柱。
16.本发明绝缘子串检测机器人的抗干扰方法的设计原理为:(1)绝缘子串检测机器人的控制壳体设置为多层的屏蔽结构。
17.以500kv输电线路为例,加载到每片绝缘子上的电压为6-22kv之间,频率为50 hz,此外还有频率为100 hz、150 hz、200 hz和250 hz的奇次谐波,绝缘子与铁塔一侧和导线一侧间都有电容存在,绝缘子串周围存在沿绝缘子轴对称分布的电场。绝缘子串检测机器人所处的电磁环境极为复杂,为了得到更好的屏蔽效果,本发明采用多层屏蔽措施。控制壳体采用多层屏蔽隔开的材料会形成多次反射,该方法比同样厚度的单一屏蔽板能产生更好的屏蔽效果。
18.影响屏蔽效果的因素有电导率、磁导率、平面电磁波的频率,铝或者铜的磁导率小于铁,但电导率大于铁。所以对于低频电磁波的情况,铁壳的屏蔽效果好于铝或者铜,对于频率大于0.01mhz的电磁干扰,铝或者铜的屏蔽效果好。因此本发明绝缘子串检测机器人的屏蔽壳采用内层铁壳、外层铜箔或铝箔的方式,在铁壳与铜箔或铝箔之间填充绝缘性能优良的聚四氟乙烯材料。
19.(2)绝缘子串检测机器人的电路板接口光电隔离设计。
20.在强电磁环境下,绝缘子串检测机器人的电路板与外界接口处容易出现尖端放电现象,串口等通信模块容易受到击穿破坏,失去原有功能。为了解决这个难题,本发明采用了接口处光电隔离措施,电路板的输入端与外界的输出端实现了电气隔离,外界的输出信号不会对电路板的输入端构成任何影响,该方法提高了抗干扰能力,具有工作稳定,使用寿
命长等优点,有效提高了信号传输效率。另外,将光电隔离装置设置在电磁屏蔽壳体内,使得机器人内部与外界复杂的电磁场完全隔离开来,保障了机器人内部电路板免受外部复杂工况的干扰。
21.(3)绝缘子串检测机器人的电路板与控制壳体多点连接。
22.由于较细的单股线内部通过高频电流时,高频阻抗会大大降低接地效果,所以本发明将绝缘子串检测机器人的接地系统摒弃用较细的单股线接地线的方法,而采用多点接地的方式。当绝缘子串检测机器人电路板的元器件产生电流时,电流可以通过就近的铜柱流向控制壳体的铁壳,以避免电流往其它方向流动,从而减少绝缘子串检测机器人电路板的电磁干扰。
23.与现有技术相比,本发明具有如下优点与有益效果:本发明绝缘子串检测机器人的抗干扰方法使得绝缘子串检测机器人具有对高电压等级的电磁屏蔽性能,从而提高绝缘子串检测机器人的抗电磁干扰能力,以保证绝缘子串检测机器人工作性能以及检测的稳定性和准确性。
附图说明
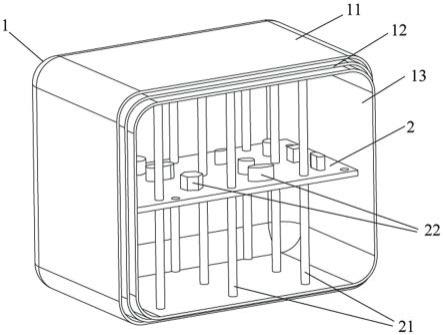
24.图1是本发明绝缘子串检测机器人控制壳体的内部示意图;图2是本发明绝缘子串检测机器人中光电隔离装置的原理框图;图3是本发明绝缘子串检测机器人中插接端子、光电隔离电路和屏蔽插头连接的电路图;其中,1为控制壳体,11为铜箔、12为聚四氟乙烯材料层、13为铁壳、2为电路板,21为铜柱、22为元器件、3为插接端子,4为光电隔离电路,5为屏蔽插头,6为外部传感器。
具体实施方式
25.下面结合附图与具体实施方式对本发明作进一步详细的描述。
26.实施例如图1至3所示,本发明绝缘子串检测机器人的抗干扰方法是这样的:将绝缘子串检测机器人的控制壳体1设置为三层的屏蔽结构,使得控制壳体1为电磁屏蔽壳体;在绝缘子串检测机器人的电路板2与外部传感器6连接的接口处设置光电隔离装置,使得电路板2的输入端与外部传感器6的输出端实现了电气隔离,同时将光电隔离装置设置在作为电磁屏蔽壳体的控制壳体1内,实现电路板2的接口处与外界电磁场隔离;将绝缘子串检测机器人的电路板2与控制壳体1多点连接,实现电路板2与绝缘子串检测机器人共同多点接地,以减少电路板2的电磁干扰。其中,将绝缘子串检测机器人的控制壳体1设置为三层的屏蔽结构是指:控制壳体1由内层、外层和中层组成,其中,外层的磁导率小于内层的磁导率,外层的电导率大于内层的电导率,中层为绝缘层,本实施例的内层采用铁壳13,外层采用铜箔11,绝缘层采用聚四氟乙烯材料层12。
27.本发明的光电隔离装置包括依次连接的插接端子3、光电隔离电路4和屏蔽插头5,其中,插接端子3与绝缘子串检测机器人的电路板2连接,屏蔽插头5用于与外部传感器6连接,屏蔽插头5安装在控制壳体1上。
28.在光电隔离装置中,光电隔离电路由光耦芯片op1、稳压二极管d1、滤波电容c1、限流电阻r1、上拉电阻r3和外围电路连接组成。而屏蔽插头5设置有接地引脚一(屏蔽插头5的第1引脚)、信号引脚一(屏蔽插头5的第4引脚)和电源引脚(屏蔽插头5的第3引脚),屏蔽插头5的接地引脚一(屏蔽插头5的第1引脚)与光电隔离电路的接地端连接,电源引脚(屏蔽插头5的第3引脚)与外部电源连接,实现对外部传感器6供电,屏蔽插头5的信号引脚一(屏蔽插头5的第4引脚)与光耦芯片op1连接。本发明的插接端子3设置有接地引脚二(插接端子3的第2引脚)和信号引脚二(插接端子3的第1引脚),接地引脚二(插接端子3的第2引脚)与光电隔离电路的接地端连接,信号引脚二(插接端子3的第1引脚)与光耦芯片op1连接。
29.光电隔离电路中的稳压二极管d1分别与屏蔽插头5的信号引脚一(屏蔽插头5的第4引脚)和接地引脚一(屏蔽插头5的第1引脚)连接,稳压二极管d1可以保障光耦芯片op1两端电压不会过大并超出承受范围。
30.外部5v电源通过上拉电阻r3与插接端子3信号引脚二(插接端子3的第1引脚)连接,滤波电容c1并联在光耦芯片op1的输入端,外部12v电源通过限流电阻r1与光耦芯片op1的输入端连接。上拉电阻r3可提高插接端子3信号引脚二(插接端子3的第1引脚)的电平值,限流电阻r1可以限制流过光耦芯片op1的电流值,滤波电容c1可以滤除流过光耦芯片op1的杂波干扰。
31.工作时,屏蔽插头5的接地引脚一(屏蔽插头5的第1引脚)和电源引脚(屏蔽插头5的第3引脚)为外部传感器6供电。外部传感器6的电平信号传到屏蔽插头5的信号引脚一(屏蔽插头5的第4引脚)上。当屏蔽插头5的信号引脚一(屏蔽插头5的第4引脚)上的电平信号是低电平的时候,光耦芯片op1的发光二极管导通,此时,插接端子3的信号引脚二(插接端子3的第1引脚)是低电平,电路板2就收到了一个低电平信号。类似的,当信号引脚一(屏蔽插头5的第4引脚)的电平信号是高电平的时候,光耦芯片op1的发光二极管截止,此时,插接端子3的信号引脚二(插接端子3的第1引脚)是高电平,电路板2就收到了一个高电平信号。因为光耦芯片op1是通过光来传递信号,故而阻断了光耦芯片op1两端的杂波电磁干扰,保障了电路板2免受外部传感器6携带的干扰信号。
32.本发明方法中,绝缘子串检测机器人的电路板2与控制壳体1多点连接是指:在控制壳体1内部设置若干根铜柱21,铜柱21与控制壳体1的铁壳13相接,绝缘子串检测机器人的电路板2穿设在若干根铜柱21上,实现与控制壳体1多点电连接。
33.本发明绝缘子串检测机器人的抗干扰方法的设计原理为:(1)绝缘子串检测机器人的控制壳体1设置为多层的屏蔽结构。
34.以500kv输电线路为例,加载到每片绝缘子上的电压为6-22kv之间,频率为50 hz,此外还有频率为100 hz、150 hz、200 hz和250 hz的奇次谐波,绝缘子与铁塔一侧和导线一侧间都有电容存在,绝缘子串周围存在沿绝缘子轴对称分布的电场。绝缘子串检测机器人所处的电磁环境极为复杂,为了得到更好的屏蔽效果,本发明采用多层屏蔽措施。控制壳体采用多层屏蔽隔开的材料会形成多次反射,该方法比同样厚度的单一屏蔽板能产生更好的屏蔽效果。
35.影响屏蔽效果的因素有电导率、磁导率、平面电磁波的频率,铝或者铜的磁导率小于铁,但电导率大于铁。所以对于低频电磁波的情况,铁壳13的屏蔽效果好于铝或者铜,对于频率大于0.01mhz的电磁干扰,铝或者铜的屏蔽效果好。因此本发明绝缘子串检测机器人
的屏蔽壳采用内层铁壳13、外层铜箔11的方式,在铁壳13与铜箔11之间填充绝缘性能优良的聚四氟乙烯材料层12。
36.(2)绝缘子串检测机器人的电路板2接口光电隔离设计。
37.在强电磁环境下,绝缘子串检测机器人的电路板2与外界接口处容易出现尖端放电现象,串口等通信模块容易受到击穿破坏,失去原有功能。为了解决这个难题,本发明采用了接口处光电隔离措施,电路板2的输入端与外部传感器6的输出端实现了电气隔离,外部传感器6的输出信号不会对电路板2的输入端构成任何影响,该方法提高了抗干扰能力,具有工作稳定,使用寿命长等优点,有效提高了信号传输效率。另外,将光电隔离装置设置在电磁屏蔽壳体内,使得机器人内部与外界复杂的电磁场完全隔离开来,保障了机器人内部电路板免受外部复杂工况的干扰。
38.(3)绝缘子串检测机器人的电路板2与控制壳体1多点连接。
39.由于较细的单股线内部通过高频电流时,高频阻抗会大大降低接地效果,所以本发明将绝缘子串检测机器人的接地系统摒弃用较细的单股线接地线的方法,而采用多点接地的方式。当绝缘子串检测机器人电路板2的元器件22产生电流时,电流可以通过就近的铜柱21流向控制壳体1的铁壳13,以避免电流往其它方向流动,从而减少绝缘子串检测机器人电路板2的电磁干扰。
40.上述实施例为本发明较佳的实施方式,但本发明的实施方式并不受上述实施例的限制,其他的任何未背离本发明的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1