一种基于声音的户内变电站故障巡视装置及其应用方法与流程
1.本发明属于电气工程技术领域,具体涉及一种基于声音的户内变电站故障巡视装置及其应用方法。
背景技术:
2.声学成像技术是近几年在迅猛发展的新型巡检技术。利用可视化声学成像技术可对其异常部位进行声源定位,并与可见光图片叠加进行直观的展示,相比于其他状态感知技术具有其优越性。但目前的声学成像技术只能对异常声音进行初步定位,而且定位精度还需要人为进行频率范围的选择来调节,具体是什么原因引起的故障也难以判断。因此,为了进一步适应现代设备管理体系要求,适应电网数字化发展趋势,以提高电力变压器的智能运检水平,需要提升声学成像技术的智能化水平。
技术实现要素:
3.本发明要解决的技术问题:针对现有技术的上述问题,提供一种基于声音的户内变电站故障巡视装置及其应用方法,本发明能够实现基于声音的户内变电站故障巡视,具有不接触带电设备、故障可视化、检测灵敏度高等诸多优点。
4.为了解决上述技术问题,本发明采用的技术方案为:
5.本发明提供一种基于声音的户内变电站故障巡视装置,包括轨道和设于轨道上可行走的巡视单元,所述巡视单元包括控制单元、云台、初级声阵列、二级声阵列以及摄像头,所述二级声阵列和摄像头均安装在云台上,所述初级声阵列包括布置于巡视单元四周的多个声传感器,所述二级声阵列包括位于同一平面上的多个声传感器,所述摄像头的光轴方向与二级声阵列的多个声传感器所在平面相互垂直,所述初级声阵列、云台、二级声阵列和摄像头均与控制单元相连。
6.可选地,所述巡视单元上设有吊杆,所述巡视单元通过吊杆悬挂安装在轨道上,且所述吊杆上安装有用于在轨道上行走的行走机构,所述行走机构与巡视单元内的控制单元相连。
7.可选地,所述初级声阵列还包括圆环,所述初级声阵列的多个声传感器分别固定在一圆环的外壁上,所述圆环套设安装在云台的固定部位上。
8.可选地,所述二级声阵列的多个声传感器采用圆形或螺旋形布置。
9.可选地,所述巡视单元内部还设有边缘网关,所述边缘网关与控制单元相连。
10.本发明提供一种前述基于声音的户内变电站故障巡视装置的应用方法,包括:
11.s101,控制巡视单元沿轨道行走,若到达预定的巡检位置则跳转步骤s102;
12.s102,根据初级声阵列采集的声音信号判断是否存在异常噪声,若存在异常噪声则根据初级声阵列采集的声音信号确定异常噪声的初始方位,跳转下一步;否则,跳转步骤s101;
13.s103,转动调节云台使得二级声阵列的多个声传感器所在平面对准异常噪声的初
始方位;
14.s104,根据二级声阵列采集的声音信号进行故障检测以确定故障类型,同时根据摄像头采集的图像识别出故障设备类型;
15.s105,存储或发送故障检测结果,跳转s101。
16.可选地,步骤s102中确定异常噪声的初始方位是指将初级声阵列中检测到声音信号幅值最大的声传感器所在的方位作为异常噪声的初始方位。
17.可选地,步骤s104中根据二级声阵列采集的声音信号进行故障检测是指将二级声阵列的多个声传感器采集的原始声音信号利用波束形成算法获得的声音信号来进行故障检测。
18.可选地,步骤s104中进行故障检测以确定故障类型包括:分别统计声音信号中变电站的本体故障、风机故障以及放电故障对应的指定频段的能量,若指定频段的能量与该频段的正常值之间的差异超过设定值,则判定为发生变电站的本体故障、风机故障或放电故障。
19.可选地,所述分别统计声音信号中变电站的本体故障、风机故障以及放电故障对应的指定频段的能量时,包括分别统计声音信号中100-500hz、500-1000hz、1000-5000hz频段的能量,若100-500hz频段的能量与该频段的正常值之间的差异超过设定值,则判定发送发生变电站的本体故障;若500-1000hz频段的能量与该频段的正常值之间的差异超过设定值,则判定发送发生变电站的风机故障;若1000-5000hz频段的能量与该频段的正常值之间的差异超过设定值,则判定发送发生变电站的放电故障。
20.和现有技术相比,本发明主要具有下述优点:1、本发明基于声音的户内变电站故障巡视装置具有不接触带电设备、故障可视化、检测灵敏度高。2、本发明基于声音的户内变电站故障巡视装置能实现智能巡视,无需人工干预,减少人工工作量。3、本发明基于声音的户内变电站故障巡视装置既能用于实现设备异常噪声自动定位,同时还能用于准确判断故障类型,提高了故障诊断效率。
附图说明
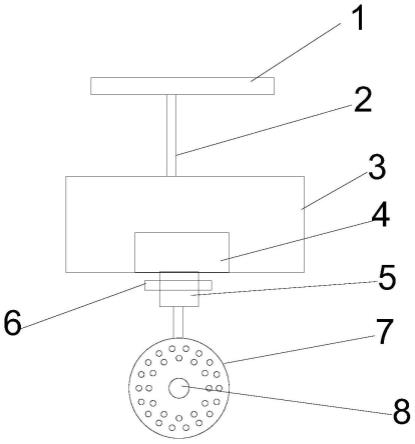
21.图1为本发明实施例中基于声音的户内变电站故障巡视装置的结构示意图。
22.图2为本发明实施例中应用方法的流程示意图。
23.图例说明:1、轨道;2、吊杆;3、巡视单元;4、控制单元;5、云台;6、初级声阵列;7、二级声阵列;8、摄像头。
具体实施方式
24.如图1所示,本实施例提供一种基于声音的户内变电站故障巡视装置,包括轨道1和设于轨道1上可行走的巡视单元3,巡视单元3包括控制单元4、云台5、初级声阵列6、二级声阵列7以及摄像头8,二级声阵列7和摄像头8均安装在云台5上,初级声阵列6包括布置于巡视单元3四周的多个声传感器以实现360
°
全方向初级定位,二级声阵列7包括位于同一平面上的多个声传感器,摄像头8的光轴方向与二级声阵列7的多个声传感器所在平面相互垂直,初级声阵列6、云台5、二级声阵列7和摄像头8均与控制单元4相连。
25.如图1所示,本实施例中巡视单元3上设有吊杆2,巡视单元3通过吊杆2悬挂安装在
轨道1上,且吊杆2上安装有用于在轨道1上行走的行走机构,行走机构与巡视单元3内的控制单元4相连。
26.轨道1上常见的行走机构可以为摩擦轮、链轮、齿轮等结构,可根据实际需要进行选择,行走机构所配套的驱动机构一般为电机,可安装在吊杆2顶部。
27.吊杆2用来支撑巡视单元3,行走机构根据设定的策略进行移动。
28.巡视单元3的主体为主机箱,用于安装控制单元4、云台5、初级声阵列6、二级声阵列7、摄像头8以及电池,本实施例中采用电池供电,电池的输出端通过稳压模块后分别与控制单元4、云台5、初级声阵列6、二级声阵列7、摄像头8的电源端相连。此外,也可以根据需要通过轨道上的电刷来实现外部供电。
29.本实施例中,巡视单元3内部还设有边缘网关,边缘网关与控制单元4相连,本实施例中边缘网关具有数据存储、分析和无线传输音频和视频数据功能。
30.控制单元4是巡视单元3的中枢环节,用于实现对初级声阵列6、云台5、二级声阵列7和摄像头8的控制和数据采集、处理以及通讯等。
31.云台5吊装在主机箱上,可受控根据初级声阵列6判断的方位进行旋转。
32.本实施例中,初级声阵列6还包括圆环,初级声阵列6的多个声传感器分别固定在一圆环的外壁上,圆环套设安装在云台5的固定部位上,既可以通过初级声阵列6可实现360
°
全方向初级定位,而且安装简单快捷。初级声阵列6的声传感器可采用memes或电容式传感器阵列,传感器数量在4至16个。
33.本实施例中,二级声阵列7的多个声传感器采用圆形或螺旋形布置,以提高声源定位的准确度。二级声阵列7的声传感器可采用memes或电容式传感器阵列,传感器数量在16至128个。
34.如图2所示,本实施例提供一种前述户内变电站故障巡视装置的应用方法,包括:
35.s101,控制巡视单元3沿轨道1行走,若到达预定的巡检位置则跳转步骤s102;
36.s102,根据初级声阵列6采集的声音信号判断是否存在异常噪声,若存在异常噪声则根据初级声阵列6采集的声音信号确定异常噪声的初始方位,跳转下一步;否则,跳转步骤s101;
37.s103,转动调节云台5使得二级声阵列7的多个声传感器所在平面对准异常噪声的初始方位;
38.s104,根据二级声阵列7采集的声音信号进行故障检测以确定故障类型,同时根据摄像头8采集的图像识别出故障设备类型;
39.s105,存储或发送故障检测结果,跳转s101。
40.需要说明的是,步骤s101~s105的执行主体既可以是控制单元4,也可以是通过与控制单元4通讯连接的上位机或控制终端,也可以是由控制单元4、与控制单元4通讯连接的上位机或控制终端两者配合完成,其可以根据需要采用所需的实现方式。
41.本实施例中,步骤s102中确定异常噪声的初始方位是指将初级声阵列6中检测到声音信号幅值最大的声传感器所在的方位作为异常噪声的初始方位。这种方式下,初级声阵列6的声传感器越多,则对于异常噪声的初始方位的检测就越准确。
42.此外,也可以在初级声阵列6的声传感器较少的情况下采用一种改进的初始方位识别方法,以降低初级声阵列6的声传感器设备成本,该改进的初始方位识别方法包括:将
初级声阵列6的各个声传感器的声音信号归一化,然后将归一化结果输入预先训练好的机器学习模型获得对应的输出角度作为异常噪声的初始方位,该机器学习模型通过训练建立了各个声传感器的归一化声音信号、异常噪声的初始方位(角度)之间的映射关系,从而可以在初级声阵列6的声传感器较少的情况下实现对异常噪声的初始方位的精确定位。
43.本实施例中,步骤s104中根据二级声阵列7采集的声音信号进行故障检测是指将二级声阵列7的多个声传感器采集的原始声音信号利用波束形成算法获得的声音信号来进行故障检测,波束形成算法可依据二级声阵列7的多个声传感器的声音信号在空间传播的不同路径,最佳的形成方向图,在不同到达方向上给予不同的天线增益,形成窄波束对准用户信号,而在其他方向尽量压低旁瓣,采用指向性接收、从而提高所采集声音信号的容量,有利于提高故障检测的准确度。由于波束形成算法为现有声音处理算法,本实施例中仅仅涉及该算法的应用,并不涉及该算法的改进,故其实现细节在此不再详细说明。
44.本实施例中,步骤s104中进行故障检测以确定故障类型包括:分别统计声音信号中变电站的本体故障、风机故障以及放电故障对应的指定频段的能量,若指定频段的能量与该频段的正常值之间的差异超过设定值,则判定为发生变电站的本体故障、风机故障或放电故障。
45.本实施例中,分别统计声音信号中变电站的本体故障、风机故障以及放电故障对应的指定频段的能量时,包括分别统计声音信号中100-500hz、500-1000hz、1000-5000hz频段的能量,若100-500hz频段的能量与该频段的正常值之间的差异超过设定值,则判定发送发生变电站的本体故障;若500-1000hz频段的能量与该频段的正常值之间的差异超过设定值,则判定发送发生变电站的风机故障;若1000-5000hz频段的能量与该频段的正常值之间的差异超过设定值,则判定发送发生变电站的放电故障。变电站的本体故障、风机故障或放电故障的设定值可以相同,也可以不同,可根据实际设备和环境下选择所需的方式。例如作为一种可选的实施方式示例,本实施例中若1000-5000hz频段的能量超过正常值20%,则标记为放电故障;若100-500hz频段的能量超过正常值10%,标记为本体故障。若500-1000hz频段的能量超过正常值5%,显然标记为本体故障。
46.步骤s104根据摄像头8采集的图像识别出故障设备类型时,可根据需要采用控制单元4或者远程的服务器来进行图像识别,一般而言比较常见的图像识别方法为采用卷积神经网络实现,将图像输入预先训练好的卷积神经网络,即可得到为对应故障设备类型的概率,从而可以确定对应的故障设备类型,例如开关柜、变压器、电抗器等。
47.步骤s105存储或发送故障检测结果可根据需要采用所需的实现形式,例如本实施例中具体为边缘网关提取二级声阵列7中的一个传声器的数据进行录音存储,然后将异常设备类型、故障类型、原始录音通过无线传输给后台值班人员。
48.综上所述,本实施例基于声音的户内变电站故障巡视装置通过初级声阵列6可实现360
°
全方向初级定位,然后通过云台5实现二级声阵列、摄像头的对准,可防止二级声阵列7的检测死角导致定位失败的问题,并减少调节云台5实现初级定位的操作,能够提高声源定位的准确度和效率,能够实现基于声音的户内变电站故障巡视,具有不接触带电设备、故障可视化、检测灵敏度高等诸多优点,能实现智能巡视,无需人工干预,减少人工工作量,既能用于实现设备异常噪声自动定位,同时还能准确判断故障类型,提高了故障诊断效率。本实施例基于声音的户内变电站故障巡视装置的应用方法通过声阵列识别进行定位和故
障类型判断,然后通过和图像识别辨识故障设备类型,达到自动对设备故障进行定位和识别最终进行记录和实时预警。
49.以上所述仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1