一种基于速度自适应自编码器的旋转机械故障监测方法与流程
1.本发明涉及机械健康状态监测领域,具体是一种基于速度自适应自编码器的旋转机械故障监测方法。
背景技术:
2.旋转机械广泛应用生产生活中,如电动机、汽轮机、燃气轮机、发电机、齿轮箱、离心泵、机床、柴油机和汽油机等。旋转机械服役过程中,由于交变载荷和相对运动的存在,会不可避免地发生材料疲劳或磨损。当疲劳或磨损积累到一定程度时,会诱发机械设备的故障。故障会劣化设备的服役表现,影响生产效率和精度,甚至导致严重的安全事故,造成重大的生命财产损失。因此,开展旋转机械故障监测,及时发现故障并维护,对避免上述问题的发生具有重大意义。
3.故障监测的目的是判断机械是否处于健康状态。工程实际中,旋转机械通常运行在变转速工况下。比如,生产线上的搬运机器人,需要往复地把物料从某一位置搬运到另一位置,相应地,机器人各轴驱动电机需要频繁地加减转速以实现物料的抓取、转移和释放。因此,本发明关注变转速工况下旋转机械的故障监测问题。相对于定转速工况,转速变化会导致复杂的信号幅值调制和频率调制,大大增加了故障监测的难度。
4.现有的变转速工况下的旋转机械故障监测的方法主要有两种,一种是用复杂的信号处理方法对振动信号进行预处理以降低转速的影响,然后从预处理的信号中提取健康度指标,并用于故障监测;另一种是将振动信号直接输入到相对复杂的深度学习模型,模型自动提取健康度指标,并进行故障监测。前者虽然能去除转速的影响,但需要大量的人工劳动进行信号分析,不宜与大数据始时代的故障监测;后者未能针对性地考虑转速变化的影响,极易导致故障的误报或漏报。
技术实现要素:
5.本发明目的在于克服现有技术的不足,提供一种基于速度自适应自编码器的旋转机械故障监测方法,该方法可自动去除转速变化的影响,提高深度学习模型在变转速工况下的故障监测精度。
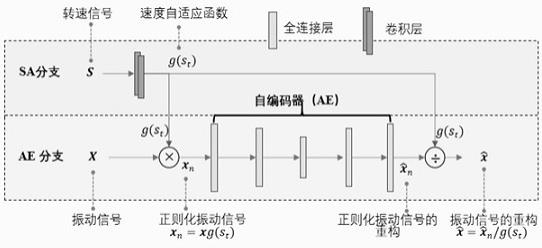
6.为实现上述发明目的,本发明一种基于速度自适应自编码器的旋转机械故障监测方法,包括以下步骤:第一步、采集目标旋转机械健康状态下的振动信号和转速信号;第二步、数据预处理:将振动信号标准化,将转速信号归一化;第三步、搭建速度自适应自编码器深度学习网络sa-ae:模型包括两个分支,速度自适应sa分支和自编码器ae分支;sa分支以转速信号时间序列为输入,输出速度自适应函数;速度自适应函数乘以振动信号时间序列,得到正则化的振动信号时间序列,所用公式为:
ae分支以正则化的振动信号时间序列为输入,输出为序列的预测值;其中,为正则化的振动信号的预测值,为正则化的振动信号时间序列,为正则化的振动信号在时刻t的预测值,为振动信号时间序列;第四步、训练sa-ae模型:用第二步骤预处理的数据训练sa-ae,使得模型损失函数最小,损失函数公式为:第五步、计算健康度指标hi:利用正则化的振动信号的预测误差, 计算健康度指标hi;第六步、确定健康状态阈值th:根据健康状态的数据的hi的大小,确定阈值th;第七步、上线应用:将新获取的目标机械的振动信号输入到第四步训练好的模型中,并通过第五步计算该信号的健康度指标hi,比较该信号的hi和阈值th的相对大小,若hi《th,则机械健康,否则机械故障。
7.本发明的目的是这样实现的:本发明一种基于速度自适应自编码器的旋转机械故障监测方法,采集目标旋转机械的振动和转速样本数据,将样本进行预处理后训练搭建好的深度学习模型sa-ae,然后从模型对输入的重构误差中提取健康度指标hi,并设置健康状态阈值th,通过比较hi和th的相对大小,对设备是否健康做出判断。其中,本方法所提的sa-ae模型,sa分支可自动去除转速对振动信号幅值的影响,从而达到提高故障监测效果的目的。
8.同时,本发明一种基于速度自适应自编码器的旋转机械故障监测方法还具有以下有益效果:1、本发明所提sa-ae模型可自动去除转速的影响,不需要复杂的信号预处理。
9.2、本发明具有简单高效的优点,适用于在线状态监测。
附图说明
10.图1是本发明提出的一种基于速度自适应自编码器的旋转机械故障监测方法的流程图;图2是深度学习模型sa-ae的示意图;图3是实施例所示的试验台;图4是实施例所示的数据集的故障类型和转速工况;图5是实施例所示的数据集的转速信号的一个样本;图6是实施例所示的数据集的加速度信号的一个样本;图7是实施例所示的本发明所提的sa-ae模型的故障监测效果;图8是实施例所示的同类模型的故障监测效果。
11.其中:1、加速度计;2、测试轴承;3、健康轴承;4、编码器;5、电机;6、变频器;sa-ae、速度自适应自编码器深度学习网络;sa、速度自适应;ae、自编码器。
具体实施方式
12.下面结合附图对本发明的具体实施方式进行描述,以便本领域的技术人员更好地理解本发明。需要特别提醒注意的是,在以下的描述中,当已知功能和设计的详细描述也许会淡化本发明的主要内容时,这些描述在这里将被忽略。
13.在本实施例中,如图1所示,本发明一种基于速度自适应自编码器的旋转机械故障监测方法,包括以下步骤:第一步:采集目标旋转机械健康状态下的振动信号和转速信号;在本实施例中,目标旋转机械包括电动机、发电机、齿轮箱、泵和风机等旋转机械;振动信号包括但不限制于加速度信号、速度信号、位移信号、扭矩信号和声压信号;转速信号为目标机械的任一旋转轴的转速。
14.第二步:数据预处理:将振动信号标准化,将转速信号归一化。在本实施例中,振动信号样本集标准化处理主要是将振动信号的均值归零、标准差归一,具体公式为:其中,和分别为振动数据的均值和标准差,为振动信号的预测值即模型的输出。
15.转速归一化处理主要将转速的范围缩比或扩比到一定范围,具体的比例可以根据实际需要来设定,例如[0, 1]或[-1, 1]或(0, 1]。
[0016]
第三步:搭建速度自适应自编码器深度学习网络sa-ae:模型包括两个分支,速度自适应sa分支和自编码器ae分支;sa分支以转速信号时间序列为输入,输出速度自适应函数;速度自适应函数乘以振动信号时间序列,得到正则化的振动信号时间序列,所用公式为:ae分支以正则化的振动信号时间序列为输入,输出为序列的预测值;其中,为正则化的振动信号的预测值,为正则化的振动信号时间序列,为正则化的振动信号在时刻t的预测值,为振动信号时间序列;在本实施例中,速度自适应自编码器深度学习网络sa-ae,其ae包括至少一个输入层、一个隐藏层和一个输出层,网络类型为卷积层或全连接层或循环网络层;其sa分支包括至少一个神经网络层,网络类型可以为卷积层或全连接层或循环网络层。
[0017]
图2展示了本实施例中采用的速度自适应自编码器深度学习网络sa-ae的结构,其中ae分支包括5全连接层。sa分支包括1个卷积层。
[0018]
第四步:训练sa-ae模型:用第二步骤预处理的数据训练sa-ae,使得模型损失函数最小,损失函数公式为:在本实施例中,sa-ae训练的目的包括两方面,一是优化模型的参数,使得上述损
失最小化,从而提高信号的预测精度;二是自动学习速度自适应函数,用于去除转速对振动信号的影响。这样可以降低转速对故障监测的影响,从而提高故障监测的效果。模型的训练方法可以是基于反向传播算法(back propagation) 的最速下降法、momentum和adam。具体的训练方法和一般神经网络模型的训练方法一样,不再赘述。
[0019]
第五步:计算健康度指标hi:利用正则化的振动信号的预测误差, 计算健康度指标hi;本实施例中,健康度指标th,可以为预测误差时域特征如均方根值(rms),频域特征如频带能量,或其他方式计算的特征。本实例采用预测误差的rms作为健康度指标。
[0020]
第六步:确定健康状态阈值th:根据健康状态的数据的hi的大小,确定阈值th。
[0021]
本实施例中,所说的健康状态阈值th,可以为健康数据的hi的统计特征值,或者其他方式计算的阈值。本实施例中,采用的健康状态阈值为hi的统计特征,公式为其中,和分别为健康数据hi的均值和标准差。
[0022]
第七步:上线应用:将新获取的目标机械的振动信号输入到第四步训练好的模型中,并通过第五步计算该信号的健康度指标hi,比较该信号的hi和阈值th的相对大小,若hi《th,则机械健康,否则机械故障。
[0023]
为了更好地说明本发明的技术效果,采用一个具体实施例对本发明进行试验验证。实施例所用数据为加拿大渥太华大学机械工程系公开的变转速工况下轴承状态监测数据集(http://dx.doi.org/10.17632/v43hmbwxpm.1)。该数据集采集自spectraquest公司生产的mfs-pk5m型机械故障模拟试验台,其结构如图3所示,mfs-pk5m型机械故障模拟试验台包括加速度计1、测试轴承2、健康轴承3、编码器4、电机5、变频器6。该数据集包括三种轴承健康状态在四种转速工况下的振动加速度数据和转速数据,如图4所示。这三种健康状态为:健康、内圈故障和外圈故障。四种转速工况为:升速、降速、先升后降和先降后升。
[0024]
在本实施例中,我们只使用健康数据对sa-ae进行训练。图5与图6是健康状态下一个转速信号和加速度信号样本。本实施例中,采用图2所示的深度学习网络sa-ae进行故障监测。所用模型参数如后。对ae分支,其包括5个全连接层,各层神经元个数为512-128-64-128-512;对sa分支,其包括1个卷积层,卷积核个数为8,卷积核神经元个数为3。模型采用adam法进行训练。
[0025]
本实施例中,图4所示的样本中,h:健康;i:内圈故障;o:外圈故障;a:升速;b:降速;c:先升后降;d:先降后升;1/2/3-重复采集编号;例如h-a-1为健康轴承升速工况下第一次采集的数据;50%的健康数据用来训练模型;剩余50%健康数据和外圈故障数据的50%将被作为新采集的数据,用来测试所提方法的有效性和先进性。图7展示了所提方法的在新采集的数据上的测试效果。图7显示,所提方法成功抑制了转速对hi的影响,从而准确地将健康数据和故障数据区分开。
[0026]
为了进一步展示本发明所提方法相对现有方法的优势,图8展示了同类模型在图4所示的数据集上的故障监测效果。所用同类模型为广泛使用的ae模型。图8表明,现有方法不能抑制转速对hi的影响,导致转速引起的hi增加和故障导致的hi增加混叠在一起,造成大量故障漏报。
[0027]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1