一种风速风向测量方法及装置
1.本发明涉及风速风向技术领域,特别是涉及一种风速风向测量方法及装置。
背景技术:
2.风能是一种清洁的可再生能源,利用风力发电是获取能源的有效途径。建立风力发电厂,首先需要对选址高空的风能进行评估,现有的《一种高空风能资源测量装置及方法》的发明专利中提到了一种基于氦气艇不同运动状态下的风速风向测量方法,该发明专利中的测量原理为:将氦气艇在高空中的运动状态分为六种,分别为:无风静止状态、有风静止状态、竖直面的匀速圆周运动、竖直面的变速圆周运动、变轨运动、水平面的匀速圆周运动。根据不同运动状态模型,建立对应的多个力学模型和力学平衡方程,导出氦气艇在不同运动状态下的风速风向测量公式。
3.根据《一种高空风能资源测量装置及方法》的发明专利测量原理可知,需要测量风速风向,首先需要通过风洞试验获取氦气艇的阻力系数、阻力面积、升力系数、升力面积。其次是通过传感器获取氦气艇三轴加速度、姿态角,系留点拉力,绳索倾角等相关参数,并使用姿态角修正氦气艇的三轴加速度。然后再对氦气艇的运动状态进行判断,将传感器测得的参数带入对应运动状态的风速风向计算公式,即可计算出氦气艇相对于风的速度和方向,再通过氦气艇的运动速度进行修正,最终得到真实的风速和风向。
4.因此,《一种高空风能资源测量装置及方法》的发明专利提到的风速风向测量原理的主要缺点为测量的风速风向的准确度低,具体表现为:
5.①
由于氦气艇的形状结构非常复杂,在高空中的阻力面积和升力面积会随着氦气艇姿态的变化而发生变化,因此,阻力和升力的计算将受到氦气艇姿态的影响,而《一种高空风能资源测量装置及方法》并没有明确给出阻力面积、升力面积和氦气艇姿态的函数关系。
6.②
由于气艇在高空中有六种运动状态,因此对运动状态的判断是非常复杂的,并且会增加测量的复杂度,运动状态的判断也直接影响到风速风向测量的精度。
7.③
该测量原理测得的风速是二维的,仅能测量高空风速在水平面上的分量。
技术实现要素:
8.本发明的目的是提供一种风速风向测量方法及装置,可提高风速风向测量结果的精度。
9.为实现上述目的,本发明提供了如下方案:
10.一种风速风向测量方法,包括:
11.获取预设参数集、系留气球的重力、系留气球受到的浮力、系留气球的方向角、系留气球在x轴方向上的真实加速度、系留气球在y轴方向上的真实加速度和系留气球在z轴方向上的真实加速度;所述预设参数集包括系留气球的总质量、系留气球受到的拉力、系留气球的倾角、空气密度和系留气球的迎风面积;所述系留气球的总质量为系留气球的质量、
传感器盒质量和所述系留气球内部气体质量之和;所述传感器盒设置在所述系留气球上;
12.根据所述系留气球在x轴方向上的真实加速度、所述系留气球在y轴方向上的真实加速度和所述系留气球在z轴方向上的真实加速度,计算所述系留气球在x轴方向上的速度、所述系留气球在y轴方向上的速度和所述系留气球在z轴方向上的速度;
13.根据所述预设参数集、所述系留气球在x轴方向上的真实加速度、所述系留气球的方向角和所述系留气球在x轴方向上的速度计算风速在x轴方向上的分量;
14.根据所述预设参数集、所述系留气球在y轴方向上的真实加速度、所述系留气球的方向角和所述系留气球在y轴方向上的速度计算风速在y轴方向上的分量;
15.根据所述预设参数集、所述系留气球在z轴方向上的真实加速度、所述系留气球的重力、所述系留气球受到的浮力和所述系留气球在z轴方向上的速度计算风速在z轴方向上的分量;
16.根据所述风速在x轴方向上的分量、所述风速在y轴方向上的分量和所述风速在z轴方向上的分量计算风速和风向,所述风向包括风的俯仰角和风的方向角。
17.可选的,当所述系留气球仅存在俯仰角时,根据所述系留气球在x轴方向上的加速度、所述系留气球的俯仰角和所述系留气球在z轴方向上的加速度计算所述系留气球在x轴方向上的真实加速度和所述系留气球在z轴方向上的真实加速度;确定所述系留气球在y轴方向上的加速度为所述系留气球在y轴方向上的真实加速度;
18.当所述系留气球仅存在滚转角时,确定所述系留气球在x轴方向上的加速度为所述系留气球在x轴方向上的真实加速度;根据所述系留气球在y轴方向上的加速度、所述系留气球的滚转角和所述系留气球在z轴方向上的加速度计算所述系留气球在y轴方向上的真实加速度和所述系留气球在z轴方向上的真实加速度;
19.当所述系留气球仅存在航向角时,确定所述系留气球在z轴方向上的加速度为所述系留气球在z轴方向上的真实加速度;根据所述系留气球在x轴方向上的加速度、所述系留气球的航向角和所述系留气球在y轴方向上的加速度计算所述系留气球在x轴方向上的真实加速度和所述系留气球在y轴方向上的真实加速度。
20.可选的,所述根据所述预设参数集、所述系留气球在x轴方向上的真实加速度、所述系留气球的方向角和所述系留气球在x轴方向上的速度计算风速在x轴方向上的分量,具体包括:
21.根据公式
[0022][0023]
计算风速在x轴方向上的分量,其中,v
风x
表示风速在x轴方向上的分量,m表示系留气球的总质量,a
x
表示系留气球在x轴方向上的真实加速度,t表示系留气球受到的拉力,θ表示系留气球的倾角、α表示系留气球的方向角,ρ
air
表示空气密度,sd表示系留气球的迎风面积,cd表示系留气球表面阻力系数,v
球x
表示系留气球在x轴方向上的速度,sign()表示符号函数。
[0024]
可选的,所述根据所述根据所述预设参数集、所述系留气球在y轴方向上的真实加速度、所述系留气球的方向角和所述系留气球在y轴方向上的速度计算风速在y轴方向上的
分量,具体包括:
[0025]
根据公式
[0026][0027]
计算风速在y轴方向上的分量,其中,v
风y
表示风速在y轴方向上的分量,m表示系留气球的总质量,ay表示系留气球在y轴方向上的真实加速度,t表示系留气球受到的拉力,θ表示系留气球的倾角、α表示系留气球的方向角,ρ
air
表示空气密度,sd表示系留气球的迎风面积,cd表示系留气球表面阻力系数,v
球y
表示系留气球在y轴方向上的速度,sign()表示符号函数。
[0028]
可选的,所述根据所述预设参数集、所述系留气球在z轴方向上的真实加速度、所述系留气球的重力、所述系留气球受到的浮力和所述系留气球在z轴方向上的速度计算风速在z轴方向上的分量,具体包括:
[0029]
根据公式
[0030][0031]
计算风速在z轴方向上的分量,其中,v
风z
表示风速在z轴方向上的分量,m表示系留气球的总质量,az表示系留气球在z轴方向上的真实加速度,g表示系留气球的重力,t表示系留气球受到的拉力,θ表示系留气球的倾角、b表示系留气球受到的浮力,ρ
air
表示空气密度,sd表示系留气球的迎风面积,cd表示系留气球表面阻力系数,v
球z
表示系留气球在z轴方向上的速度,sign()表示符号函数。
[0032]
可选的,根据公式计算风速,其中,v
风x
表示风速在x轴方向上的分量,v
风y
表示风速在y轴方向上的分量,v
风z
表示风速在z轴方向上的分量,v
风
表示风速。
[0033]
可选的,根据公式计算风的俯仰角,其中,v
风x
表示风速在x轴方向上的分量,v
风y
表示风速在y轴方向上的分量,v
风z
表示风速在z轴方向上的分量,θ
风
表示风的俯仰角。
[0034]
可选的,根据公式计算风的方向角,其中,v
风x
表示风速在x轴方向上的分量,v
风y
表示风速在y轴方向上的分量,α
风
表示风的方向角。
[0035]
一种风速风向测量装置,应用于上述所述的风速风向测量方法,所述装置包括:
[0036]
系留气球、拉力传感器、绳索和传感器盒;所述系留气球通过所述拉力传感器与所述绳索的一端连接,所述绳索的另一端固定在地面上,所述传感器盒设置在所述系留气球上;所述拉力传感器用于测量所述系留气球受到的拉力;所述传感器盒内置角度传感器、三
轴加速度传感器和姿态角传感器;所述角度传感器用于测量系留气球的倾角、系留气球的方向角、所述三轴加速度传感器用于测量系留气球在x轴方向上的加速度、系留气球在y轴方向上的加速度和系留气球在z轴方向上的加速度、所述姿态角传感器用于测量所述系留气球的俯仰角、滚转角和航向角。
[0037]
根据本发明提供的具体实施例,本发明公开了以下技术效果:本发明在计算风向时引入风的俯仰角,并且在计算风速和风向的过程中不需要判断系留气球的运动状态避免了判断错误引起的测量误差,可提高风速风向测量结果的精度,并且能够测量三维风向。
附图说明
[0038]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
[0039]
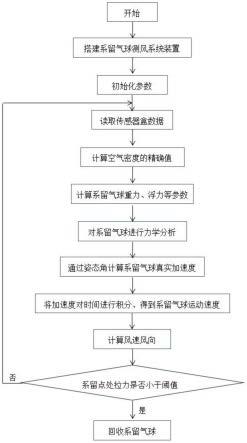
图1为本发明实施例提供的一种风速风向测量方法的流程图;
[0040]
图2为本发明实施例提供的风速风向测量装置结构示意图;
[0041]
图3为本发明实施例提供的系留气球力学分析图;
[0042]
图4为本发明实施例提供的系留气球竖直平面力学分析图;
[0043]
图5为本发明实施例提供的系留气球三轴力学分析图。
具体实施方式
[0044]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0045]
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
[0046]
本发明可以为高空风速风向测量提供一种新的方法,可以进行三维风向的测量,降低了测量的建设成本以及计算的复杂度,提升了高空风速风向测量的精度。
[0047]
所述风速风向测量方法,包括:
[0048]
获取预设参数集、系留气球的重力、系留气球受到的浮力、系留气球的方向角、系留气球在x轴方向上的真实加速度、系留气球在y轴方向上的真实加速度和系留气球在z轴方向上的真实加速度;所述预设参数集包括系留气球的总质量、系留气球受到的拉力、系留气球的倾角、空气密度和系留气球的迎风面积;所述系留气球的总质量为系留气球的质量、传感器盒质量和所述系留气球内部气体质量之和;所述传感器盒设置在所述系留气球上。系留气球为高空中漂浮的气球,内部由氦气填充,通过绳索与地面驻点相连接,系留点为绳索上端与系留气球相连接的点。
[0049]
根据所述系留气球的姿态角、所述系留气球在x轴方向上的加速度、所述系留气球在y轴方向上的加速度和所述系留气球在z轴方向上的加速度计算所述系留气球在x轴方向上的真实加速度、所述系留气球在y轴方向上的真实加速度和所述系留气球在z轴方向上的
真实加速度。
[0050]
根据所述系留气球在x轴方向上的真实加速度、所述系留气球在y轴方向上的真实加速度和所述系留气球在z轴方向上的真实加速度,计算所述系留气球在x轴方向上的速度、所述系留气球在y轴方向上的速度和所述系留气球在z轴方向上的速度。
[0051]
根据所述预设参数集、所述系留气球在x轴方向上的真实加速度、所述系留气球的方向角和所述系留气球在x轴方向上的速度计算风速在x轴方向上的分量。
[0052]
根据所述预设参数集、所述系留气球在y轴方向上的真实加速度、所述系留气球的方向角和所述系留气球在y轴方向上的速度计算风速在y轴方向上的分量。
[0053]
根据所述预设参数集、所述系留气球在z轴方向上的真实加速度、所述系留气球的重力、所述系留气球受到的浮力和所述系留气球在z轴方向上的速度计算风速在z轴方向上的分量。
[0054]
根据所述风速在x轴方向上的分量、所述风速在y轴方向上的分量和所述风速在z轴方向上的分量计算风速和风向,所述风向包括风的俯仰角和风的方向角。
[0055]
在实际应用中,当所述系留气球仅存在俯仰角时,根据所述系留气球在x轴方向上的加速度、所述系留气球的俯仰角和所述系留气球在z轴方向上的加速度计算所述系留气球在x轴方向上的真实加速度和所述系留气球在z轴方向上的真实加速度(具体采用公式27和29);确定所述系留气球在y轴方向上的加速度为所述系留气球在y轴方向上的真实加速度。
[0056]
当所述系留气球仅存在滚转角时,确定所述系留气球在x轴方向上的加速度为所述系留气球在x轴方向上的真实加速度;根据所述系留气球在y轴方向上的加速度、所述系留气球的滚转角和所述系留气球在z轴方向上的加速度计算所述系留气球在y轴方向上的真实加速度和所述系留气球在z轴方向上的真实加速度(具体采用公式31和32)。
[0057]
当所述系留气球仅存在航向角时,确定所述系留气球在z轴方向上的加速度为所述系留气球在z轴方向上的真实加速度;根据所述系留气球在x轴方向上的加速度、所述系留气球的航向角和所述系留气球在y轴方向上的加速度计算所述系留气球在x轴方向上的真实加速度和所述系留气球在y轴方向上的真实加速度(具体采用公式33和34)。
[0058]
在实际应用中,所述根据所述预设参数集、所述系留气球在x轴方向上的真实加速度、所述系留气球的方向角和所述系留气球在x轴方向上的速度计算风速在x轴方向上的分量,具体包括:
[0059]
根据公式
[0060][0061]
计算风速在x轴方向上的分量,其中,v
风x
表示风速在x轴方向上的分量,m表示系留气球的总质量,a
x
表示系留气球在x轴方向上的真实加速度,t表示系留气球受到的拉力,θ表示系留气球的倾角、α表示系留气球的方向角,ρ
air
表示空气密度,sd表示系留气球的迎风面积,cd表示系留气球表面阻力系数,v
球x
表示系留气球在x轴方向上的速度,sign()表示符号函数,其功能是取某个数的符号(正或负),当括号内的值大于等于0时,函数值为1;当括号内的值小于0时,函数值为-1。
[0062]
在实际应用中,所述根据所述根据所述预设参数集、所述系留气球在y轴方向上的真实加速度、所述系留气球的方向角和所述系留气球在y轴方向上的速度计算风速在y轴方向上的分量,具体包括:
[0063]
根据公式
[0064][0065]
计算风速在y轴方向上的分量,其中,v
风y
表示风速在y轴方向上的分量,m表示系留气球的总质量,ay表示系留气球在y轴方向上的真实加速度,t表示系留气球受到的拉力,θ表示系留气球的倾角、α表示系留气球的方向角,ρ
air
表示空气密度,sd表示系留气球的迎风面积,cd表示系留气球表面阻力系数,v
球y
表示系留气球在y轴方向上的速度,sign()表示符号函数。
[0066]
在实际应用中,所述根据所述预设参数集、所述系留气球在z轴方向上的真实加速度、所述系留气球的重力、所述系留气球受到的浮力和所述系留气球在z轴方向上的速度计算风速在z轴方向上的分量,具体包括:
[0067]
根据公式
[0068][0069]
计算风速在z轴方向上的分量,其中,v
风z
表示风速在z轴方向上的分量,m表示系留气球的总质量,az表示系留气球在z轴方向上的真实加速度,g表示系留气球的重力,t表示系留气球受到的拉力,θ表示系留气球的倾角、b表示系留气球受到的浮力,ρ
air
表示空气密度,sd表示系留气球的迎风面积,cd表示系留气球表面阻力系数,v
球z
表示系留气球在z轴方向上的速度,sign()表示符号函数。
[0070]
在实际应用中,根据公式计算风速,其中,v
风x
表示风速在x轴方向上的分量,v
风y
表示风速在y轴方向上的分量,v
风z
表示风速在z轴方向上的分量,v
风
表示风速。
[0071]
在实际应用中,根据公式计算风的俯仰角,其中,v
风x
表示风速在x轴方向上的分量,v
风y
表示风速在y轴方向上的分量,v
风z
表示风速在z轴方向上的分量,θ
风
表示风的俯仰角。
[0072]
在实际应用中,根据公式计算风的方向角,其中,v
风x
表示风速在x轴方向上的分量,v
风y
表示风速在y轴方向上的分量,α
风
表示风的方向角。
[0073]
本发明实施例还提供了一种应用于上述方法的风速风向测量装置,所述装置包括:
[0074]
系留气球、拉力传感器、绳索和传感器盒;所述系留气球通过所述拉力传感器与所
述绳索的一端连接,所述绳索的另一端固定在地面上,所述传感器盒设置在所述系留气球上;所述拉力传感器用于测量所述系留气球受到的拉力;所述传感器盒内置角度传感器、三轴加速度传感器和姿态角传感器;所述角度传感器用于测量系留气球的倾角、系留气球的方向角、所述三轴加速度传感器用于测量系留气球在x轴方向上的加速度、系留气球在y轴方向上的加速度和系留气球在z轴方向上的加速度、所述姿态角传感器用于测量所述系留气球的俯仰角、滚转角和航向角。
[0075]
本发明实施例提供了一种更加具体的风速风向测量方法,利用系留气球在高空中的三轴加速度、三轴姿态角以及系留点处的拉力,通过对系留气球进行受力分析,结合系留气球的运动状态,从而推导出风速及风向的计算公式,此外,在本发明公开的推导过程中,引入了高空中风的俯仰角,最终测量出的风向数据包括水平方向角以及俯仰角,如图1所示,该方法的简要步骤如下:
[0076]
搭建系留气球测风系统装置,初始化参数,读取传感器盒数据,计算空气密度的精确值,计算系留气球重力、浮力等参数,对系留气球进行力学分析,通过姿态角计算系留气球真实加速度,将真实加速度对时间进行积分,得到系留气球运动速度,计算风速和风向,回收系留气球。
[0077]
具体而言包括:
[0078]
步骤一、搭建系留气球测风系统装置即风速风向测量装置:
[0079]
系留气球测风系统装置如图2所示,主要有柔性太阳能板、系留气球、传感器盒、拉力传感器、绳索和地面驻点组成。其中,柔性太阳能板覆盖在系留气球顶端,用于日间对传感器盒内部的蓄电池充电。传感器盒内置了高精度的角度传感器,三轴加速度、姿态角传感器,温湿度传感器,气压传感器,co2浓度传感器、24位ad采样芯片以及无线传输模块,其中,拉力传感器输出的信号是模拟信号由传感器盒内置的24位ad采样芯片转化为数字信号,传感器盒将采集到的所有传感器数据和计算出的风速风向通过无线传输模块发送到地面端的监测站,系留点处由拉力传感器将系留气球和绳索相连。绳索的下端连接地面驻点,用于固定整个系统装置。
[0080]
步骤二、初始化参数
[0081]
初始化测量系统参数。系留气球半径为r,系留气球质量为m
ball
,填充气体为氦气,密度ρ
he
=0.1785kg/m3,绳索长度为l,根据系留气球材质确定表面阻力系数cd,以及重力加速度g。
[0082]
步骤三、读取传感器盒数据
[0083]
通过系留气球下方的传感器盒,读取系留气球的倾角θ,方向角α,三轴加速度(所述系留气球在x轴方向上的加速度、所述系留气球在y轴方向上的加速度和所述系留气球在z轴方向上的加速度a
′
x
、a
′y、a
′z),姿态角(俯仰角、滚转角和航向角γ1、γ2、γ3),温度temp,湿度h,气压p,co2浓度c,系留点处拉力t。
[0084]
步骤四、计算空气密度的精确值
[0085]
空气密度ρ
air
与大气压力p和大气热力学温度temp有关,具体关系如公式1所示,
[0086][0087]
其中,k是与空气中co2含量、空气湿度有关的参数。由此可知,只要通过传感器获
取高空环境温湿度、大气压以及co2浓度,即可计算出高空环境空气密度的精确值ρ
air
。
[0088]
步骤五、计算系留气球重力、浮力和迎风面积
[0089]
系留气球内部气体体积计算公式如公式2所示:
[0090][0091]
系留气球总质量m为外壳质量m
ball
、传感器盒质量m
sensor
以及内部气体质量v
ball
·
ρ
he
之和,如公式3所示,系留气球重力如公式4所示。
[0092]
m=m
ball
+m
sensor
+v
ball
·
ρ
he
公式3
[0093]
g=mg公式4
[0094]
系留气球所受到的浮力如公式5所示。
[0095]
b=ρ
air
·vball
·
g公式5
[0096]
此外,空气阻力的计算需要系留气球的迎风面积,由于形状为球体,迎风面积不受系留气球姿态的影响,如公式6所示。
[0097]
sd=πr2公式6
[0098]
步骤六、对系留气球进行力学分析
[0099]
对任意时刻的系留气球进行力学分析。如图3所示,系留气球在竖直方向上收到了重力g,升力b,竖直方向上的空气阻力dz;在水平方向上受到了空气阻力d
xoy
;此外,系留气球还受到一个沿绳索方向的拉力t。在当前时刻,系留气球所受到所有力的合力,将对系留气球产生加速度。
[0100]
将高空中的风速分解到x,y,z三个方向上,如公式7、8、9所示。
[0101][0102][0103][0104]
其中,v
风
为高空中的真实风速,θ
风
为风的俯仰角,范围0~180
°
,α
风
为风的方向角,范围0~360
°
。
[0105]
系留气球所受x,y,z三个方向上的空气阻力分别如公式10、11、12所示。
[0106][0107][0108][0109]
其中,v
球x
、v
球y
、v
球z
为系留气球当前时刻的速度在x,y,z三个方向上的分量,sign()函数用于指定空气阻力的方向。
[0110]
系留气球在水平面受到的空气阻力d
xoy
,以及空气阻力的方向角如公式13、14所示。
[0111][0112][0113]
如图4所示,将系留气球所受竖直方向的力进行合并,并进行力学分析。
[0114]
其中fz为系留气球竖直方向的合力,如公式15所示。
[0115]fz
=b+d
z-g公式15
[0116]f合
为竖直方向上所受力fz和水平方向上的空气阻力d
xoy
的合力,f
合
的大小如公式16所示。
[0117][0118]f合
与水平面的夹角η如公式17所示,与拉力t反方向的夹角γ如公式18所示。
[0119][0120]
γ=θ-η公式18
[0121]
再将f
合
分解到与拉力平行方向和垂直方向上,其中与拉力方向平行的分力与拉力大小相等,方向相反,形成二力平衡,则拉力t如公式19所示。此时,与拉力方向垂直的分力f
动
为系留气球收到所有力的合力,如公式20所示。
[0122]
t=f
合
·
cosγ公式19
[0123]f动
=f
合
·
sinγ公式20
[0124]
当f
动
大于0时,当前时刻系留气球处于非稳态,存在加速度。将f
动
分解到x,y,z三个方向上,分别如公式21、公式22、公式23所示。
[0125][0126][0127]f动z
=f
动
·
cosθ公式22
[0128]
当前时刻,系留气球的三轴加速度如公式24、公式25、公式26所示。
[0129][0130][0131][0132]
步骤七、通过姿态角计算系留气球真实加速度
[0133]
当仅存在俯仰角γ1时,系留气球真实三轴加速度的计算方式如公式27、公式28、
公式29所示。
[0134]ax
=a'
x
·
cosγ1±
a'z·
sinγ1公式27
[0135]ay
=a
′y公式28
[0136][0137]
当仅存在滚转角γ2时,系留气球真实加速度的计算方式如公式30、公式31、公式32所示。
[0138]ax
=a'
x
公式30
[0139]ay
=a'y·
cosγ2±
a'z·
sinγ2公式31
[0140][0141]
当仅存在航向角γ3时,系留气球真实加速度的计算方式如公式33、公式34、公式35所示。
[0142]ax
=a'
x
·
cosγ3±
a'y·
sinγ3公式33
[0143][0144]az
=a
′z公式35
[0145]
其中a
′
x
、a
′y、a
′z是传感器测得的三轴加速度,公式中的
“±”
、是由姿态角γ1、γ2、γ3的范围决定的,将计算的系留气球真实三轴加速度带入风速风向测量公式中进行计算。
[0146]
步骤八、将真实加速度对时间进行积分,得到系留气球运动速度
[0147]
在数字电路中,对真实加速度进行积分的操作采用的是微元法,也就是对加速度进行高频的采集,采集间隔为t,采集到的加速度数据为
…an-1
,an,a
n+1
…
,假设第n时刻的速度为vn,则第n+1时刻的速度如公式36所示。
[0148]vn+1
=vn+ant公式36
[0149]
其中v、a泛指系留气球沿三轴方向的真实速度和真实加速度,即v
x
、vy、vz和a
x
、ay、az。由于采用的是微元法,则采样时间间隔t越小,计算的速度误差越小,但要求处理器有更高的时钟频率,功耗也会相应增加。
[0150]
步骤九、计算风速和风向
[0151]
根据步骤六的力学分析结果,再对当前时刻系留气球的三轴受力进行分析,将传感器测得的数据作为系统输入,风速风向作为系统输出,如图5所示。
[0152]
系留气球三轴方向所受力的合力构成了当前时刻系留气球的三轴加速度,如公式37、公式38、公式39所示。
[0153]f合x
=ma
x
=t
x
+d
x
公式37
[0154]f合y
=may=ty+dy公式38
[0155]f合z
=maz=b+d
z-g-tz公式39
[0156]
其中t
x
、ty、tz为拉力在三轴方向上的分力,如公式40、公式41、公式42所示。
[0157]
t
x
=t
·
cosθ
·
cosα公式40
[0158]
ty=t
·
cosθ
·
sinα公式41
[0159]
tz=t
·
sinθ公式42
[0160]
结合公式10、公式11、公式12即可导出风速在三轴方向上的分量,如公式43、公式44、公式45所示。风速如公式46所示。
[0161][0162][0163][0164][0165]
风的俯仰角θ
风
和方向角α
风
如公式47,公式48所示。
[0166][0167][0168]
步骤十、回收系留气球
[0169]
当检测到传感器盒采集到的拉力数据小于阈值时,则说明系留气球发生破损漏气或自然损耗,系留气球内部的氦气不足以提供足够的升力来保持整个测量系统装置的稳定,则对系留气球进行回收处理。
[0170]
本发明具有以下优点:
[0171]
1)本发明为高空风速风向测量提供一种新的方法,提升风速风向测量精度,对于山地、林地等应用场景,有效的降低高空风速风向测量的成本,并且可以避免植被的破坏。相较于传统的测量方法,本发明可以测量高空三维风向,有助于提升风能的利用率。
[0172]
2)首次采用系留气球结构进行高空风速风向的测量,降低了算法的复杂度。不需要对系留气球的运动状态进行判断,降低了算法的复杂度,提升了测量的精度。通过传感器盒采集到的各项传感器数据即可完成风速风向的测量。
[0173]
3)测风系统装置简易且稳定:步骤一所示的基于系留气球力学模型的风速风向测量系统装置,采用了球形的结构,使得不管系留气球处于何种姿态,迎风面积始终为固定的常数。省去了机翼结构,使得在对系留气球进行受力分析时,不用考虑升力的影响。而背景技术中提及的风能测量装置,采用的是气艇形状,迎风面积会收到气艇姿态的影响,导致算法复杂度提高,并且带有机翼结构,升力的计算同样要考虑气艇姿态对机翼投影面积的影响。
[0174]
4)算法复杂度更低,风速测量精度更高:步骤六所示的系留气球力学分析方法,不
需要对高空中系留气球的运动状态进行判断,而是直接对系留气球进行受力分析,合力将对系留气球产生加速度,降低了算法的复杂度,并且避免了运动状态的判断对风速测量精度的影响。而背景技术中提到的力学分析方法,首先需要对氦气艇的运动状态进行判断,每种运动状态对应一组风速风向计算公式,相较于本发明,算法复杂度更高。
[0175]
5)提供了一种三维风向的测量方法:步骤九所示的风速风向测量方法可以测得高空风速在三轴方向上的分量,然后采用三角函数关系,即可计算出风的俯仰角和方向角。而背景技术中提及的风向测量方法和常见的风速风向及仅能测量风的方向角。本发明的测量方法能够提升风能资源的利用率。
[0176]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
[0177]
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1