一种校准磁力计的方法和相关设备与流程
本技术实施例涉及虚拟现实领域,尤其涉及一种校准磁力计的方法和相关设备。
背景技术:
1、随着增强现实(augmented reality,ar)技术、虚拟现实(virtual reality,vr)技术、自动驾驶和机器人等技术的发展和进步,同时定位与建图(simultaneouslocalization and mapping,slam)技术也得到了更加广泛的应用。slam技术能够基于视觉、激光、惯性测量单元(inertial measurement unit,imu)等传感器进行计算,获知设备当前的位姿,同时构建出所处环境的地图。slam在自动驾驶和机器人的应用场景中,用于帮助指导设备进行自主导航。
2、在自动驾驶和机器人的应用场景中,除了slam在自主导航中起到重要作用,磁力计作为地球磁场的矢量测量的重要手段之一,用于采集设备的航向角,从而辅助定位导航技术进行更为精准的定位与导航。
3、由于磁力计容易受到环境磁场的影响而产生测量误差,进而影响定位导航中的方向计算,因此,利用磁力计采集设备的航向角的场景中,需要及时对磁力计的误差进行校准,而当前的磁力计的误差校准方法中,利用磁力计的测量数据,对磁力计进行校准,利用磁力计的测量数据对磁力计进行校准的方法中,由于磁力计的测量数据本身可能存在偏差,因此利用磁力计的测量数据对磁力计进行校准的方法中,利用磁力计的测量数据对磁力计是否需要进行校准的参照就会不准确,无法高效的对磁力计进行校准。如何进一步提升磁力计的校准效率,从而测量可靠性就成了技术人员需要解决的问题。
技术实现思路
1、本技术实施例提供了一种校准磁力计的方法和相关设备,用于提升磁力计的校准效率,从而提升测量可靠性。
2、本技术实施例第一方面提供了一种校准磁力计的方法,该方法应用于用户设备,所述用户设备包括磁力计,方法包括:通过同时定位与建图(simultaneous localizationand mapping,slam)算法计算所述用户设备的正向与地磁参考方向的第一偏航角;通过所述磁力计计算所述用户设备的正向与地磁参考方向的第二偏航角;根据所述第一偏航角和所述第二偏航角计算第一差值;若所述第一差值超出所述第一阈值,则对所述磁力计进行校准。
3、本技术实施例中,通过slam算法计算用户设备的正向于地磁参考方向的第一偏航角,通过磁力计计算用户设备的正向于地磁参考方向的第二偏航角,并且通过第一偏航角和第二偏航角计算第一差值,当第一差值超出第一阈值时,对磁力计进行校准。通过利用slam算法计算获得的第一偏航角和磁力计计算获得的第二偏航角的第一差值,若第一差值超出第一阈值,则对磁力计进行校准,由于slam算法的对第一偏航角的计算具有较高的可靠性,因此本技术实施例提出的方案可以大幅提升磁力计的校准效率,从而提升磁力计的测量可靠性。
4、在第一方面一种可能的实施方式中,通过slam算法计算所述用户设备的正向与地磁参考方向的第一偏航角之前,所述方法还包括:对所述slam算法进行初始化处理得到所述用户设备的正向相对于所述地磁参考方向的初始化偏航角;所述通过slam算法计算所述用户设备的正向与地磁参考方向的第一偏航角包括:通过slam算法计算所述用户设备的当前位姿数据;根据所述当前位姿数据以及所述初始化偏航角计算所述第一偏航角。
5、本技术实施例中,在通过slam算法计算用户设备的正向关于地磁参考方向的第一偏航角之前,该方法还包括对slam算法进行初始化处理得到用户设备的正向相对于地磁参考方向的初始化偏航角,通过slam算法计算用户设备的正向与地磁参考方向的第一偏航角,具体可以通过slam算法计算用户设备的当前位姿数据,根据当前位姿数据以及初始化偏航角计算得到第一偏航角。通过利用slam算法计算获得的当前位姿数据,以及用户设备的正向相对于地磁参考方向的初始化偏航角,由于当前位姿数据中的偏航角相关数据为相对于初始化偏航角得到的,因此可以利用当前位姿数据以及初始化偏航角计算获得第一偏航角,由于通过slam算法计算获得的当前位姿数据是基于用户设备中的视觉传感器和/或光学传感器采集到的数据计算获得,因此第一偏航角的数值获得不依赖于磁力计,利用第一航向角判断磁力计的计算数据是否可靠,并根据判断结果对磁力计的相关参数进行进一步的修正,从而提升了磁力计的校准效率,从而提升了磁力计的测量可靠性。
6、在第一方面一种可能的实施方式中,所述通过所述磁力计计算所述用户设备的正向与地磁参考方向的第二偏航角包括:获取所述磁力计的第一磁力计数据;根据所述当前位姿数据将所述第一磁力计数据对齐到参考平面得到第二磁力计数据;根据所述第二磁力计数据计算所述第二偏航角。
7、本技术实施例中,通过磁力计计算用户设备的正向与地磁参考方向的第二偏航角包括,获取磁力计的第一磁力计数据,根据当前位姿数据将第一磁力计数据对齐到参考平面获得第二磁力计数据,根据第二磁力计数据计算第二偏航角,利用第一磁力计数据和当前位姿数据将第一磁力计数据对其到参考平面得到第二磁力计数据,根据第二磁力计数据计算获得第二偏航角,实现了通过磁力计获得第二偏航角,提升了方案的可实现性。
8、在第一方面一种可能的实施方式中,所述参考平面为水平面。本技术实施例中,提供了以水平面作为参考平面进行数据的修正,将相对容易确定的水平面作为参考平面,降低了方案的实现难度,提升了方案的可实现性。
9、在第一方面一种可能的实施方式中,所述根据所述第一偏航角和所述第二偏航角计算第一差值包括:在预设时长内获取多组第一偏航角和第二偏航角;计算每一组第一偏航角和第二偏航角的差值得到多个第二差值;将所述第二差值的均值或方差值作为所述第一差值。
10、本技术实施例中,通过计算每一组第一偏航角和第二偏航角的差值得到多个第二差值,将第二差值的均值或方差作为第一差值,通过计算第一偏航角和第二偏航角的差值得到第二差值,并将第二差值的均值或方差作为第一差值,利用第二差值的均值来判断第二差值的数据是否稳定,或,利用第二差值的方差来判断第二差值的离散程度是否超出预期来判断是否进行磁力计的校准,由利于更加精准的找到磁力计出现偏差的时刻,提高了磁力计进行校准的效率。
11、在第一方面一种可能的实施方式中,所述对所述磁力计进行校准之前,所述方法还包括:向所述用户设备的用户发送校准提示信息;当接收到所述用户输入的校准指令时,触发所述对所述磁力计进行校准的步骤。
12、本技术实施例中,在对磁力计进行校准之前,还向用户设备的用户发送校准提示信息,当接收到用户输入的校准指令时,触发对磁力计进行校准的步骤。通过向用户设备的用户发送校准提示信息,并在接收到用户输入的校准指令时,触发对磁力计进行校准的步骤,提升了方案的可操作性。
13、在第一方面一种可能的实施方式中,所述地磁参考方向为地磁北向。本技术实施例中,提供了以地磁北向作为地磁参考方向进行数据的辅助计算,将相对容易确定的地磁北向作为地磁参考方向,降低了方案的实现难度,提升了方案的可实现性。
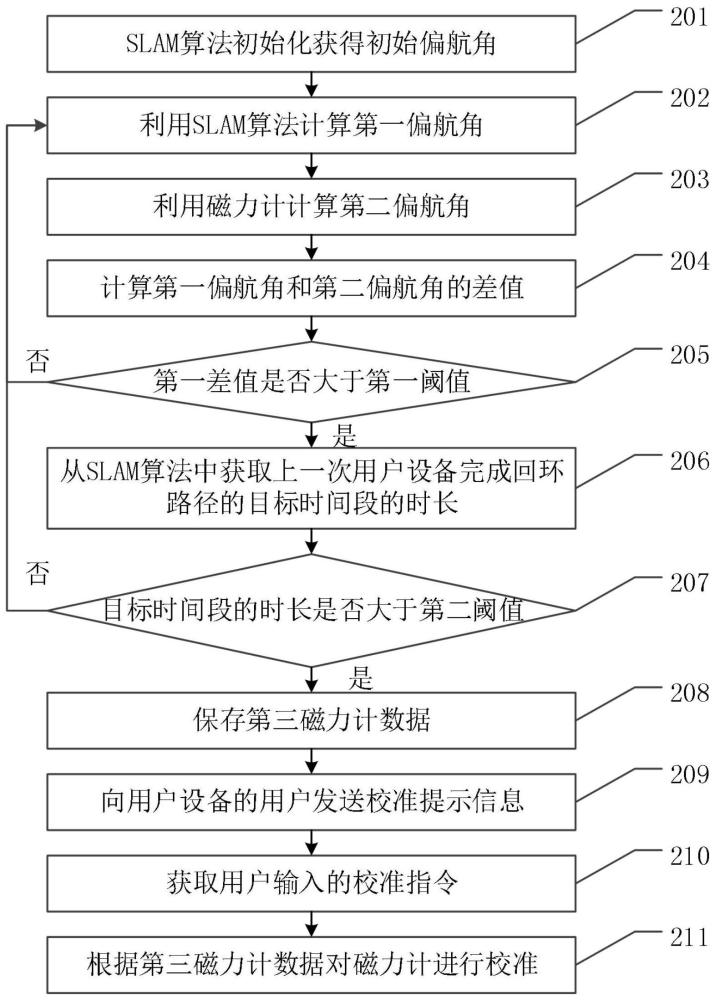
14、在第一方面一种可能的实施方式中,所述对所述磁力计进行校准包括:通过所述slam算法确定所述用户设备上一次的回环路径,所述回环路径为所述用户设备在移动过程中,移动起点和移动终点重合时所述用户设备的移动路径;获取所述回环路径的移动起点时间戳和移动终点时间戳;根据所述移动起点时间戳和移动终点时间戳计算所述回环路径对应的目标时间段的时长;若所述目标时间段的时长大于第二阈值,则获取所述目标时间段内所述磁力计的第三磁力计数据;根据所述第三磁力计数据对所述磁力计进行校准。
15、本技术实施例中,对磁力计进行校准包括:通过slam算法确定用户设备上一次的回环路径,获取回环路径的移动起点时间戳和移动终点时间戳,根据移动起点时间戳和移动重点时间戳计算回环路径对应的目标时间段的时长,若该目标时间段的时长大于第二阈值,则获取目标时间段内磁力计的第三磁力计数据,根据第三磁力计数据对磁力计进行校准。以用户设备移动的完整回环路径为单位,进行数据采集,获得第三磁力计数据,并根据第三磁力计数据对磁力计进行校准。通过限制目标时间段的时长大于第二阈值,保障了第三磁力计数据的数据量,提升了根据第三磁力计数据对磁力计进行校准的精准度。
16、本技术实施例第二方面提供了一种用户设备,所述设备包括:
17、计算单元,用于通过同时定位与建图slam算法计算所述用户设备的正向与地磁参考方向的第一偏航角;
18、所述计算单元,还用于通过磁力计计算所述用户设备的正向与地磁参考方向的第二偏航角;
19、所述计算单元,还用于根据所述第一偏航角和所述第二偏航角计算第一差值;
20、校准单元,用于若所述第一差值超出所述第一阈值,则对所述磁力计进行校准。
21、在第二方面一种可能的实施方式中,所述计算单元,具体用于:
22、对所述slam算法进行初始化处理得到所述用户设备的正向相对于所述地磁参考方向的初始化偏航角;
23、通过slam算法计算所述用户设备的当前位姿数据;
24、根据所述当前位姿数据以及所述初始化偏航角计算所述第一偏航角。
25、在第二方面一种可能的实施方式中,所述计算单元,具体用于:
26、获取所述磁力计的第一磁力计数据;
27、根据所述当前位姿数据将所述第一磁力计数据对齐到参考平面得到第二磁力计数据;
28、根据所述第二磁力计数据计算所述第二偏航角。
29、在第二方面一种可能的实施方式中,所述参考平面为水平面。
30、在第二方面一种可能的实施方式中,所述计算单元,具体用于:
31、在预设时长内获取多组第一偏航角和第二偏航角;
32、计算每一组第一偏航角和第二偏航角的差值得到多个第二差值;
33、将所述第二差值的均值或方差值作为所述第一差值。
34、在第二方面一种可能的实施方式中,所述设备还包括:
35、发送单元,用于向所述用户设备的用户发送校准提示信息;
36、所述校准单元,还用于当接收到所述用户输入的校准指令时,触发所述对所述磁力计进行校准的步骤。
37、在第二方面一种可能的实施方式中,所述地磁参考方向为地磁北向。
38、在第二方面一种可能的实施方式中,所述校准单元,具体用于:
39、通过所述slam算法确定所述用户设备上一次的回环路径,所述回环路径为所述用户设备在移动过程中,移动起点和移动终点重合时所述用户设备的移动路径;
40、获取所述回环路径的移动起点时间戳和移动终点时间戳;
41、根据所述移动起点时间戳和移动终点时间戳计算所述回环路径对应的目标时间段的时长;
42、若所述时长大于第二阈值,则获取所述目标时间段内所述磁力计的第三磁力计数据;
43、根据所述第三磁力计数据对所述磁力计进行校准。
44、本技术实施例第三方面提供了一种用户设备,包括处理器和存储器,所述存储器用于存储指令,所述处理器用于执行所述指令,当所述处理器执行所述指令时,执行如前述第一方面或第一方面任一种可能的实施方式中所述的方法。
45、本技术实施例第四方面提供了一种计算机可读存储介质,包括程序,当其在计算机上运行时,使得计算机执行如前述第一方面或第一方面任一种可能的实施方式中所述的方法。
46、本技术实施例第五方面提供了一种包含指令的计算机程序产品,当其在计算机上运行时,使得计算机执行如前述第一方面或第一方面任一种可能的实施方式中所述的方法。
- 还没有人留言评论。精彩留言会获得点赞!