轨迹定位方法、装置、电子设备及存储介质与流程
本发明涉及计算机领域,尤其涉及一种轨迹定位方法、装置、电子设备及存储介质。
背景技术:
1、目前的轨迹定位方法基本都是基于室内地图,通过轨迹传感器辅助实现室内移动物体的移动轨迹,通过适当的算法对轨迹数据处理实现对室内移动物体的定位。
2、然而,现有的轨迹定位方法并未考虑移动物体的个体差异,简单的基于传感器的运动轨迹数据来定位,且需要借助室内地图作为辅助参考校正,对于缺乏室内地图、不同运动速度行为特征的物体识别定位必然存在较大差异,从而使得轨迹定位精度低。
技术实现思路
1、本发明提供一种轨迹定位方法、装置、电子设备及存储介质,旨在提升轨迹定位精度。
2、第一方面,本发明提供一种轨迹定位方法,包括:
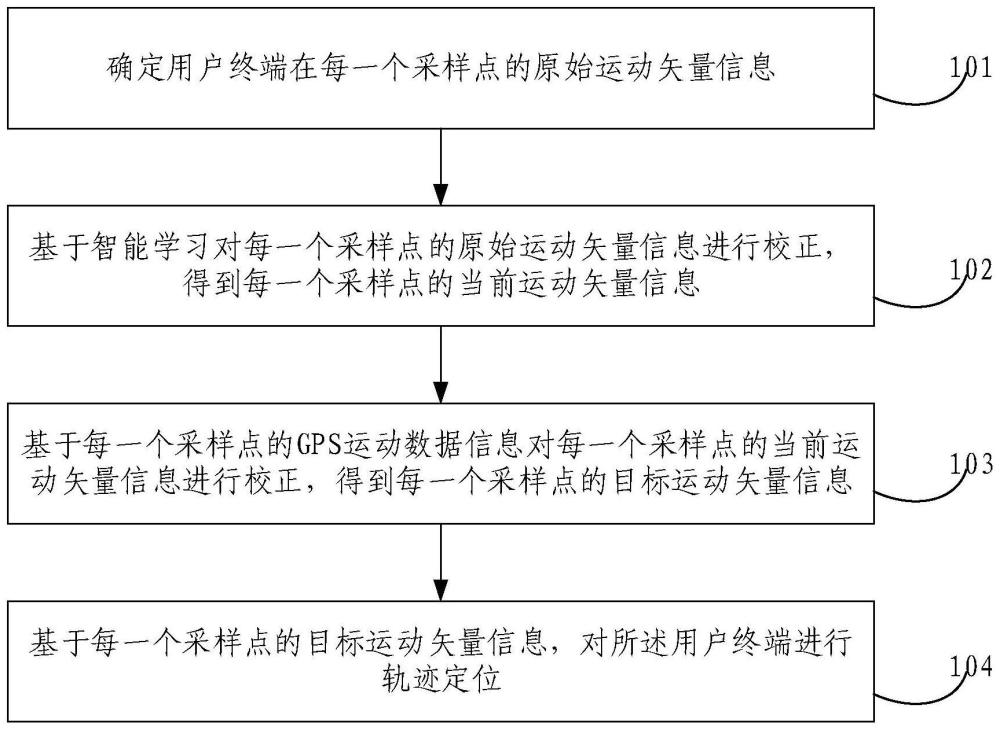
3、确定用户终端在每一个采样点的原始运动矢量信息;
4、基于智能学习对每一个采样点的原始运动矢量信息进行校正,得到每一个采样点的当前运动矢量信息;
5、基于每一个采样点的gps运动数据信息对每一个采样点的当前运动矢量信息进行校正,得到每一个采样点的目标运动矢量信息;
6、基于每一个采样点的目标运动矢量信息,对所述用户终端进行轨迹定位。
7、在一个实施例中,所述基于每一个采样点的目标运动矢量信息,对所述用户终端进行轨迹定位,包括:
8、确定所述用户终端的起始采样点;
9、基于所述起始采样点的起始高度信息和经纬度信息,以及每一个采样点的目标运动矢量信息,对所述用户终端进行轨迹定位。
10、所述基于所述起始采样点的起始高度信息和经纬度信息,以及每一个采样点的目标运动矢量信息,对所述用户终端进行轨迹定位的过程,还包括:
11、确定所述用户终端的当前环境中是否存在室内分布系统;
12、若所述用户终端的当前环境中存在室内分布系统,则对运动矢量中心采样点进行误差补偿。
13、所述对运动矢量中心采样点进行误差补偿,包括:
14、基于所述运动矢量中心采样点和每一个采样点的目标运动矢量信息,计算拟合运动轨迹点;
15、确定所述拟合运动轨迹点和所述运动矢量中心采样点的误差;
16、基于每一个采样点的目标运动矢量信息对误差进行补偿。
17、所述基于每一个采样点的gps运动数据信息对每一个采样点的当前运动矢量信息进行校正,得到每一个采样点的目标运动矢量信息,包括:
18、确定每一个采样点的当前运动矢量信息的原始修正系数;
19、基于每一个采样点的gps运动数据信息、当前运动矢量信息和原始修正系数,对每一个采样点的当前运动矢量信息进行校正,得到每一个采样点的目标运动矢量信息。
20、所述基于每一个采样点的gps运动数据信息、当前运动矢量信息和原始修正系数,对每一个采样点的当前运动矢量信息进行校正,得到每一个采样点的目标运动矢量信息,包括:
21、基于每一个采样点的gps运动数据信息、当前运动矢量信息和原始修正系数,计算每一个采样点的目标修正系数;
22、将每一个采样点的目标修正系数替换每一个采样点的原始修正系数,以对每一个采样点的当前运动矢量信息进行校正,得到每一个采样点的目标运动矢量信息。
23、所述原始运动矢量信息包括原始高度信息;
24、所述基于智能学习对每一个采样点的原始运动矢量信息进行校正,得到每一个采样点的当前运动矢量信息,包括:
25、基于所述智能学习确定搜索窗口长度,并根据每一个采样点的原始高度信息和所述搜索窗口长度确定每一个采样点的高度采样信息;
26、将每一个采样点的高度采样信息进行均值处理,得到每一个采样点的当前样本高度信息。
27、第二方面,本发明提供一种轨迹定位装置包括:
28、确定模块,用于确定用户终端在每一个采样点的原始运动矢量信息;
29、第一校正模块,用于基于智能学习对每一个采样点的原始运动矢量信息进行校正,得到每一个采样点的当前运动矢量信息;
30、第二校正模块,用于基于每一个采样点的gps运动数据信息对每一个采样点的当前运动矢量信息进行校正,得到每一个采样点的目标运动矢量信息;
31、轨迹定位模块,用于基于每一个采样点的目标运动矢量信息,对所述用户终端进行轨迹定位。
32、第三方面,本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现第一方面所述轨迹定位方法。
33、第四方面,本发明还提供一种非暂态计算机可读存储介质,所述非暂态计算机可读存储介质包括计算机程序,所述计算机程序被所述处理器执行时实现第一方面所述轨迹定位方法。
34、第五方面,本发明还提供一种计算机程序产品,所述计算机程序产品包括计算机程序,所述计算机程序被所述处理器执行时实现第一方面所述轨迹定位方法。
35、本发明提供的轨迹定位方法、装置、电子设备及存储介质,确定用户终端在每一个采样点的原始运动矢量信息;基于智能学习对每一个采样点的原始运动矢量信息进行校正,得到每一个采样点的当前运动矢量信息;基于每一个采样点的gps运动数据信息对每一个采样点的当前运动矢量信息进行校正,得到每一个采样点的目标运动矢量信息;基于每一个采样点的目标运动矢量信息,对用户终端进行轨迹定位。在轨迹定位的过程中,仅通过用户终端可得到运动矢量信息,无需借助额外辅助设备,同时,基于智能学习和gps运动数据信息能够双重校正,对不同测量个体和相同个体运动差异自适应修正,提升了轨迹定位精度。
技术特征:
1.一种轨迹定位方法,其特征在于,包括:
2.根据权利要求1所述的轨迹定位方法,其特征在于,所述基于每一个采样点的目标运动矢量信息,对所述用户终端进行轨迹定位,包括:
3.根据权利要求2所述的轨迹定位方法,其特征在于,所述基于所述起始采样点的起始高度信息和经纬度信息,以及每一个采样点的目标运动矢量信息,对所述用户终端进行轨迹定位的过程,还包括:
4.根据权利要求3所述的轨迹定位方法,其特征在于,所述对运动矢量中心采样点进行误差补偿,包括:
5.根据权利要求1所述的轨迹定位方法,其特征在于,所述基于每一个采样点的gps运动数据信息对每一个采样点的当前运动矢量信息进行校正,得到每一个采样点的目标运动矢量信息,包括:
6.根据权利要求5所述的轨迹定位方法,其特征在于,所述基于每一个采样点的gps运动数据信息、当前运动矢量信息和原始修正系数,对每一个采样点的当前运动矢量信息进行校正,得到每一个采样点的目标运动矢量信息,包括:
7.根据权利要求1至6任一项所述的轨迹定位方法,其特征在于,所述原始运动矢量信息包括原始高度信息;
8.一种轨迹定位装置,其特征在于,包括:
9.一种电子设备,所述电子设备包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至7任一项所述的轨迹定位方法。
10.一种非暂态计算机可读存储介质,所述非暂态计算机可读存储介质包括计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至7任一项所述的轨迹定位方法。
技术总结
本发明涉及计算机领域,提供一种轨迹定位方法、装置、电子设备及存储介质,该方法包括:确定用户终端在每一个采样点的原始运动矢量信息;基于智能学习对每一个采样点的原始运动矢量信息进行校正,得到每一个采样点的当前运动矢量信息;基于每一个采样点的GPS运动数据信息对每一个采样点的当前运动矢量信息进行校正,得到每一个采样点的目标运动矢量信息;基于每一个采样点的目标运动矢量信息,对用户终端进行轨迹定位。本发明实施例提供的轨迹定位方法仅通过用户终端可得到运动矢量信息,无需借助额外辅助设备,同时,基于智能学习和GPS运动数据信息能够双重校正,对不同测量个体和相同个体运动差异自适应修正,提升了轨迹定位精度。
技术研发人员:夏龙根
受保护的技术使用者:中国移动通信集团广东有限公司
技术研发日:
技术公布日:2024/5/16
- 还没有人留言评论。精彩留言会获得点赞!