目标手术导航装置的精度检测方法、装置及电子设备与流程
本发明涉及医疗,具体而言,涉及一种目标手术导航装置的精度检测方法、装置及电子设备。
背景技术:
1、随着技术的不断发展,越来越多的手术导航系统被应用在医疗领域。手术导航系统在一定程度上为患者带来了很大的好处,提高了手术精度、缩短了医生在手术中的学习周期、提高了医生在术中对手术部位的可见性等。其中,手术导航系统中的光学定位仪的精度是手术导航系统是否精准的关键,决定了假体是否可以按照策划位置顺利植入,然而,目前相关技术中对手术导航系统中的光学定位仪进行精度检测,存在检测准确性较低的问题。
2、针对上述的问题,目前尚未提出有效的解决方案。
技术实现思路
1、本发明实施例提供了一种目标手术导航装置的精度检测方法、装置及电子设备,以至少解决现有技术中对手术导航系统中的光学定位仪进行精度检测,存在检测准确性较低的技术问题。
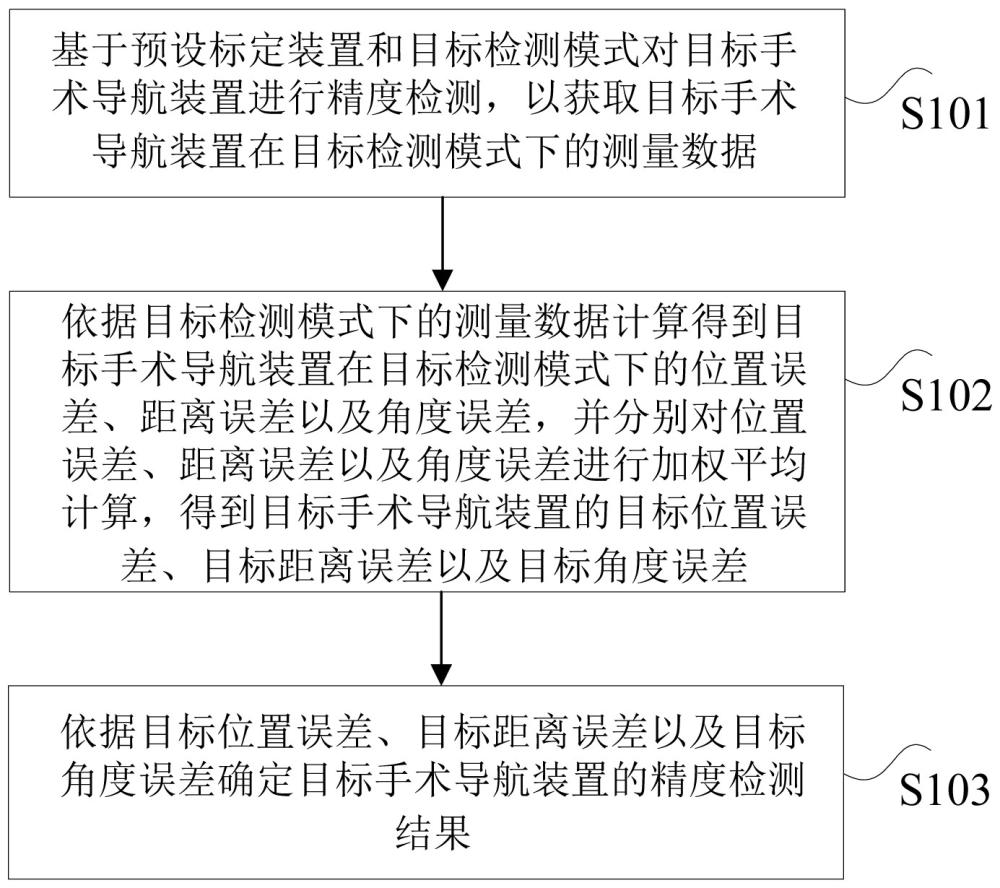
2、根据本发明实施例的一个方面,提供了一种目标手术导航装置的精度检测方法,包括:基于预设标定装置和目标检测模式对目标手术导航装置进行精度检测,以获取目标手术导航装置在目标检测模式下的测量数据,其中,目标检测模式包括以下至少之一:第一检测模式、第二检测模式、第三检测模式、第四检测模式,每种检测模式下预设标定装置和目标手术导航装置的运动状态不同,目标手术导航装置用于实现光学定位,测量数据至少包括预设标定装置上的多个标定点的位置数据、距离数据以及角度数据;依据目标检测模式下的测量数据计算得到目标手术导航装置在目标检测模式下的位置误差、距离误差以及角度误差,并分别对位置误差、距离误差以及角度误差进行加权平均计算,得到目标手术导航装置的目标位置误差、目标距离误差以及目标角度误差;依据目标位置误差、目标距离误差以及目标角度误差确定目标手术导航装置的精度检测结果,其中,精度检测结果用于表征目标手术导航装置的精度是否满足预设精度要求。
3、进一步地,基于预设标定装置和目标检测模式对目标手术导航装置进行精度检测,以获取目标手术导航装置在目标检测模式下的测量数据,包括:对于目标检测模式,依据预设配准算法对预设标定装置进行配准,并基于目标手术导航装置的探针对预设标定装置上的多个标定点进行数据采集,以依据数据采集得到的多组精度检测数据计算得到目标手术导航装置在目标检测模式下的测量数据。
4、进一步地,第一检测模式为固定预设标定装置和固定目标手术导航装置的模式,在目标检测模式为第一检测模式的情况下,依据预设配准算法对预设标定装置进行配准,并基于目标手术导航装置的探针对预设标定装置上的多个标定点进行数据采集,以依据数据采集得到的多组精度检测数据计算得到目标手术导航装置在目标检测模式下的测量数据,包括:依据预设配准算法确定预设标定装置和目标手术导航装置的位置关系,并基于位置关系固定预设标定装置和目标手术导航装置;基于目标手术导航装置的探针采集预设标定装置上的多个标定点的第一空间坐标,并依据多个标定点的第一空间坐标确定多个第一距离和多个第一角度;以多个标定点中的目标标定点为坐标原点,依据多个标定点的第一空间坐标构建第一目标坐标系,并获取多个标定点中的第一标定点在第一目标坐标系下的第一坐标数据;重复执行的基于目标手术导航装置的探针采集预设标定装置上的多个标定点的第一空间坐标,并依据多个标定点的第一空间坐标确定多个第一距离和多个第一角度,以多个标定点中的目标标定点为坐标原点,依据多个标定点的第一空间坐标构建第一目标坐标系,并获取多个标定点中的第一标定点在第一目标坐标系下的第一坐标数据的步骤,得到多组精度检测数据,其中,多组精度检测数据由多组多个第一距离、多组多个第一角度以及多组第一坐标数据组成;分别对多组多个第一距离、多组多个第一角度以及多组第一坐标数据进行均值计算,得到多个第一目标距离、多个第一目标角度以及多个第一目标坐标数据,并将多个第一目标距离作为距离数据,将多个第一目标角度作为角度数据,将多个第一目标坐标数据作为位置数据;依据距离数据、角度数据以及位置数据组成目标手术导航装置在第一检测模式下的测量数据。
5、进一步地,第二检测模式为固定预设标定装置和移动目标手术导航装置的模式,在目标检测模式为第二检测模式的情况下,依据预设配准算法对预设标定装置进行配准,并基于目标手术导航装置的探针对预设标定装置上的多个标定点进行数据采集,以依据数据采集得到的多组精度检测数据计算得到目标手术导航装置在目标检测模式下的测量数据,包括:依据预设配准算法对预设标定装置进行配准,并控制目标手术导航装置从第一位置移动至第二位置;在目标手术导航装置移动过程中,基于目标手术导航装置的探针采集预设标定装置上的多个标定点的第二空间坐标,并依据多个标定点的第二空间坐标确定多个第二距离和多个第二角度;以多个标定点中的目标标定点为坐标原点,依据多个标定点的第二空间坐标构建第二目标坐标系,并获取多个标定点中的第一标定点在第二目标坐标系下的第二坐标数据;重复执行的在目标手术导航装置移动过程中,基于目标手术导航装置的探针采集预设标定装置上的多个标定点的第二空间坐标,并依据多个标定点的第二空间坐标确定多个第二距离和多个第二角度,以多个标定点中的目标标定点为坐标原点,依据多个标定点的第二空间坐标构建第二目标坐标系,并获取多个标定点中的第一标定点在第二目标坐标系下的第二坐标数据的步骤,得到多组精度检测数据,其中,多组精度检测数据由多组多个第二距离、多组多个第二角度以及多组第二坐标数据组成;分别对多组多个第二距离、多组多个第二角度以及多组第二坐标数据进行均值计算,得到多个第二目标距离、多个第二目标角度以及多个第二目标坐标数据,并将多个第二目标距离作为距离数据,将多个第二目标角度作为角度数据,将多个第二目标坐标数据作为位置数据;依据距离数据、角度数据以及位置数据组成目标手术导航装置在第二检测模式下的测量数据。
6、进一步地,第三检测模式为移动预设标定装置和固定目标手术导航装置的模式,在目标检测模式为第三检测模式的情况下,依据预设配准算法对预设标定装置进行配准,并基于目标手术导航装置的探针对预设标定装置上的多个标定点进行数据采集,以依据数据采集得到的多组精度检测数据计算得到目标手术导航装置在目标检测模式下的测量数据,包括:依据预设配准算法对预设标定装置进行配准,并控制预设标定装置从第三位置移动至第四位置;在预设标定装置移动过程中,基于目标手术导航装置的探针采集预设标定装置上的多个标定点的第三空间坐标,并依据多个标定点的第三空间坐标确定多个第三距离和多个第三角度;以多个标定点中的目标标定点为坐标原点,依据多个标定点的第三空间坐标构建第三目标坐标系,并获取多个标定点中的第一标定点在第三目标坐标系下的第三坐标数据;重复执行的在预设标定装置移动过程中,基于目标手术导航装置的探针采集预设标定装置上的多个标定点的第三空间坐标,并依据多个标定点的第三空间坐标确定多个第三距离和多个第三角度,以多个标定点中的目标标定点为坐标原点,依据多个标定点的第三空间坐标构建第三目标坐标系,并获取多个标定点中的第一标定点在第三目标坐标系下的第三坐标数据的步骤,得到多组精度检测数据,其中,多组精度检测数据由多组多个第三距离、多组多个第三角度以及多组第三坐标数据组成;分别对多组多个第三距离、多组多个第三角度以及多组第三坐标数据进行均值计算,得到多个第三目标距离、多个第三目标角度以及多个第三目标坐标数据,并将多个第三目标距离作为距离数据,将多个第三目标角度作为角度数据,将多个第三目标坐标数据作为位置数据;依据距离数据、角度数据以及位置数据组成目标手术导航装置在第三检测模式下的测量数据。
7、进一步地,第四检测模式为移动预设标定装置和移动目标手术导航装置的模式,在目标检测模式为第四检测模式的情况下,依据预设配准算法对预设标定装置进行配准,并基于目标手术导航装置的探针对预设标定装置上的多个标定点进行数据采集,以依据数据采集得到的多组精度检测数据计算得到目标手术导航装置在目标检测模式下的测量数据,包括:依据预设配准算法对预设标定装置进行配准,并控制预设标定装置从第五位置移动至第六位置,控制目标手术导航装置从第七位置移动至第八位置;在预设标定装置和目标手术导航装置移动过程中,基于目标手术导航装置的探针采集预设标定装置上的多个标定点的第四空间坐标,并依据多个标定点的第四空间坐标确定多个第四距离和多个第四角度;以多个标定点中的目标标定点为坐标原点,依据多个标定点的第四空间坐标构建第四目标坐标系,并获取多个标定点中的第一标定点在第四目标坐标系下的第四坐标数据;重复执行的在预设标定装置和目标手术导航装置移动过程中,基于目标手术导航装置的探针采集预设标定装置上的多个标定点的第四空间坐标,并依据多个标定点的第四空间坐标确定多个第四距离和多个第四角度,以多个标定点中的目标标定点为坐标原点,依据多个标定点的第四空间坐标构建第四目标坐标系,并获取多个标定点中的第一标定点在第四目标坐标系下的第四坐标数据的步骤,得到多组精度检测数据,其中,多组精度检测数据由多组多个第四距离、多组多个第四角度以及多组第四坐标数据组成;分别对多组多个第四距离、多组多个第四角度以及多组第四坐标数据进行均值计算,得到多个第四目标距离、多个第四目标角度以及多个第四目标坐标数据,并将多个第四目标距离作为距离数据,将多个第四目标角度作为角度数据,将多个第四目标坐标数据作为位置数据;依据距离数据、角度数据以及位置数据组成目标手术导航装置在第四检测模式下的测量数据。
8、进一步地,在目标检测模式为第一检测模式、第二检测模式、第三检测模式以及第四检测模式的情况下,依据目标检测模式下的测量数据计算得到目标手术导航装置在目标检测模式下的位置误差、距离误差以及角度误差,包括:获取预设标定装置上的多个标定点对应的标称值,其中,标称值至少包括标称位置、标称距离以及标称角度;依据目标手术导航装置在第一检测模式下的测量数据和多个标定点对应的标称值计算得到目标手术导航装置在第一检测模式下的第一位置误差、第一距离误差以及第一角度误差;依据目标手术导航装置在第二检测模式下的测量数据和多个标定点对应的标称值计算得到目标手术导航装置在第二检测模式下的第二位置误差、第二距离误差以及第二角度误差;依据目标手术导航装置在第三检测模式下的测量数据和多个标定点对应的标称值计算得到目标手术导航装置在第三检测模式下的第三位置误差、第三距离误差以及第三角度误差;依据目标手术导航装置在第四检测模式下的测量数据和多个标定点对应的标称值计算得到目标手术导航装置在第四检测模式下的第四位置误差、第四距离误差以及第四角度误差;依据第一位置误差、第二位置误差、第三位置误差以及第四位置误差组成位置误差,依据第一距离误差、第二距离误差、第三距离误差以及第四距离误差组成距离误差,依据第一角度误差、第二角度误差、第三角度误差以及第四角度误差组成角度误差。
9、进一步地,在目标检测模式为第一检测模式、第二检测模式、第三检测模式以及第四检测模式的情况下,分别对位置误差、距离误差以及角度误差进行加权平均计算,得到目标手术导航装置的目标位置误差、目标距离误差以及目标角度误差,包括:获取第一检测模式对应的第一权重、第二检测模式对应的第二权重、第三检测模式对应的第三权重以及第四检测模式对应的第四权重;依据第一权重、第二权重、第三权重、第四权重、第一位置误差、第二位置误差、第三位置误差以及第四位置误差进行加权平均计算,得到目标位置误差;依据第一权重、第二权重、第三权重、第四权重、第一距离误差、第二距离误差、第三距离误差以及第四距离误差进行加权平均计算,得到目标距离误差;依据第一权重、第二权重、第三权重、第四权重、第一角度误差、第二角度误差、第三角度误差以及第四角度误差进行加权平均计算,得到目标角度误差。
10、进一步地,依据目标位置误差、目标距离误差以及目标角度误差确定目标手术导航装置的精度检测结果,包括:对目标位置误差与第一误差阈值进行比对,得到第一比对结果,对目标距离误差与第二误差阈值进行比对,得到第二比对结果,对目标角度误差与第三误差阈值进行比对,得到第三比对结果;若第一比对结果表征目标位置误差小于第一误差阈值,且第二比对结果表征目标距离误差小于第二误差阈值,且第三比对结果表征目标角度误差小于第三误差阈值,则将目标手术导航装置的精度满足预设精度要求作为精度检测结果。
11、根据本发明实施例的另一方面,还提供了一种目标手术导航装置的精度检测装置,包括:第一处理单元,用于基于预设标定装置和目标检测模式对目标手术导航装置进行精度检测,以获取目标手术导航装置在目标检测模式下的测量数据,其中,目标检测模式包括以下至少之一:第一检测模式、第二检测模式、第三检测模式、第四检测模式,每种检测模式下预设标定装置和目标手术导航装置的运动状态不同,目标手术导航装置用于实现光学定位,测量数据至少包括预设标定装置上的多个标定点的位置数据、距离数据以及角度数据;第一计算单元,用于依据目标检测模式下的测量数据计算得到目标手术导航装置在目标检测模式下的位置误差、距离误差以及角度误差,并分别对位置误差、距离误差以及角度误差进行加权平均计算,得到目标手术导航装置的目标位置误差、目标距离误差以及目标角度误差;第一确定单元,用于依据目标位置误差、目标距离误差以及目标角度误差确定目标手术导航装置的精度检测结果,其中,精度检测结果用于表征目标手术导航装置的精度是否满足预设精度要求。
12、根据本发明实施例的另一方面,还提供了一种计算机程序产品,包括计算机程序,计算机程序在被处理器执行时实现上述的目标手术导航装置的精度检测方法。
13、根据本发明实施例的另一方面,还提供了一种计算机可读存储介质,该计算机可读存储介质中存储有计算机程序,其中,计算机程序被设置为运行时执行上述的目标手术导航装置的精度检测方法。
14、根据本发明实施例的另一方面,还提供了一种电子设备,该电子设备包括一个或多个处理器;存储器,用于存储一个或多个程序,当一个或多个程序被一个或多个处理器执行时,使得一个或多个处理器实现用于运行程序,其中,程序被设置为运行时执行上述的目标手术导航装置的精度检测方法。
15、在本发明实施例中,采用使用精度样块进行精度检测的方式,首先基于预设标定装置和目标检测模式对目标手术导航装置进行精度检测,以获取目标手术导航装置在目标检测模式下的测量数据,然后依据目标检测模式下的测量数据计算得到目标手术导航装置在目标检测模式下的位置误差、距离误差以及角度误差,并分别对位置误差、距离误差以及角度误差进行加权平均计算,得到目标手术导航装置的目标位置误差、目标距离误差以及目标角度误差,然后依据目标位置误差、目标距离误差以及目标角度误差确定目标手术导航装置的精度检测结果,其中,目标检测模式包括以下至少之一:第一检测模式、第二检测模式、第三检测模式、第四检测模式,每种检测模式下预设标定装置和目标手术导航装置的运动状态不同,目标手术导航装置用于实现光学定位,测量数据至少包括预设标定装置上的多个标定点的位置数据、距离数据以及角度数据,精度检测结果用于表征目标手术导航装置的精度是否满足预设精度要求。
16、在上述过程中,通过光学定位仪(即目标手术导航装置)探针采集精度样块(即预设标定装置)各个标定点的坐标,得到点与点之间的位置、角度等,然后计算出光学定位仪的位置误差、距离误差以及角度误差来验证光学定位仪的精度是否符合精度要求,提高了光学定位仪的精度检测的准确性,从而能够使假体植入更精准、假体植入角度更符合患者实际情况,进而能够降低假体磨损与假体脱位风险。
17、由此可见,通过本发明的技术方案,达到了提高手术导航系统的精度的目的,从而实现了提高光学定位仪的精度检测的准确性的技术效果,进而解决了现有技术中对手术导航系统中的光学定位仪进行精度检测,存在检测准确性较低的技术问题。
- 还没有人留言评论。精彩留言会获得点赞!