一种室外无人清扫车遍历清扫路线自适应生成的方法与流程
本发明主要涉及自动驾驶相关,具体是一种室外无人清扫车遍历清扫路线自适应生成的方法。
背景技术:
1、全覆盖路径规划(complete coverage path planning)问题,是无人清扫车在工作时需解决的关键性问题,其关键在于要保证遍历工作区域内全部区域的同时,要尽量避免路径重复,缩短无人车的移动距离。目前的主要方式有神经网络法和路径规划法。
2、神经网络法利用神经网络的自学习、并行性等特性,增强机器人的“智能”,提高覆盖效率。该算法拥有较好的实时性,可以在无人车工作时逃离死区以及自动避障。但是基于生物启发神经网络的全覆盖算法计算量大,同时此种方法中神经网络模型的衰减率等参数没有最优值,在实现算法时只能通过反复实验确定,参数的设定存在人为不确定因素,从而影响其在线应用。
3、路径规划法利用栅格图将遍历区域栅格图像化,在从起始点开始基于遍历规划法、蚁群搜索等方法原理,在环境中直线搜索,覆盖直线范围中的栅格,当检测到边界时,规划搜索转为顺时针曲线搜索达到转弯或者掉头,并重复上述过程,直至尽头栅格无法进行覆盖。路径规划法的覆盖面积具有极大的随机性,从理论上讲,给定充足的时间,能够使机器人覆盖足够的空间范围,但这种方法非常低效。这种方法的优点是:原理逻辑简单,计算资源消耗小;这种方法的缺点是:在局部范围内存在大量的重复路径,且环境适用性差,采用栅格图法进行搜索遍历效率较低。
技术实现思路
1、为解决目前技术的不足,本发明结合现有技术,从实际应用出发,提供一种室外无人清扫车遍历清扫路线自适应生成的方法,通过考虑到无人车的转弯半径,无人车的宽度,运动学约束等自身因素,自适应的生成一条合适的遍历路线,帮助室外清扫车在路径较短的同时覆盖率高的遍历清扫整个工作。
2、本发明的技术方案如下:
3、一种室外无人清扫车遍历清扫路线自适应生成的方法,包括如下步骤:
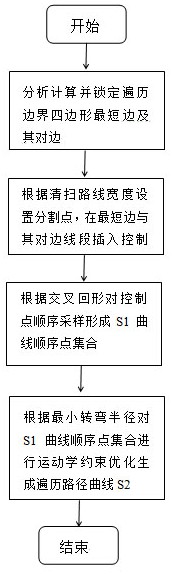
4、s1、划定无人清扫车遍历区域形成边界四边形,分析计算出边界四边形最短边及其对边;
5、s2、基于清扫时的路线宽度设置分割点,在边界四边形最短边与其对边线段均匀插点生成规划的控制点;
6、s3、对控制点顺序采样得到一条连续的交叉回形曲线;
7、s4、基于最小转弯半径对曲线的控制点集合进行运动学约束优化生成遍历路径曲线;
8、进一步,步骤s1具体包括:通过遍历区域边界四边形的四个顶点坐标计算四条边的边长,,,,计算方式如下:
9、设任一边顶点下标为和,两顶点分别为,,及其坐标分别为,,欧式距离为,
10、,计算出四条边中的最短边,
11、。
12、进一步,步骤s2具体包括:引入清扫时的路线宽度,将最短边根据路线宽度均匀分割,使边界四边形分成个区域,
13、,将最短边和最短边的对边都均匀插点生成规划控制点,使两条线段上的总点数均为。
14、进一步,步骤s3具体包括:将最短边和最短边的对边的点一对一连接,将同一条边上的非相邻点进行连接,从而得到一条连续的交叉回形曲线,曲线由当前所有点的控制点集合组成,即:
15、,其中,表示第个控制点。
16、进一步,步骤s4具体包括:
17、s41、在曲线中,基于折线控制点进行掉头,每组调头折线控制点由曲线顺序相邻的两个折线控制点组成;由于车辆无法折线运动,因此每组掉头折线控制点组成;由于车辆无法折线运动,因此每组掉头折线控制点之间插入的曲线为一段圆弧,在中取点,拟合直线,取点拟合直线,计算两直线交点为点,点分别连接控制点、点,计算欧式距离和应满足:
18、;
19、s42、引入无人清扫车转弯时的最小转弯半径为,连接点和点,设长度为,车辆转弯时的转弯半径必须大于等于最小转弯半径,即:
20、;
21、s43、最终基于边界四边形区域的四个顶点坐标、清扫时的路线宽度以及最小转弯半径,得到一条遍历区域的清扫路线,表示第个控制点,路线满足以下条件:
22、,其中,点坐标为,点坐标为。
23、本发明的有益效果:
24、本发明采用规则采样控制点搜索的方法充分考虑了车辆运动学约束,对指定区域进行了清扫路线作业全覆盖路线生成,通过本方法有效提高区域清扫作业覆盖范围,并减少重复路线缩短作业路线长度,节约成本的同时提高了无人清扫车的清扫效率。
技术特征:
1.一种室外无人清扫车遍历清扫路线自适应生成的方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的室外无人清扫车遍历清扫路线自适应生成的方法,其特征在于,步骤s1具体包括:通过遍历区域边界四边形的四个顶点坐标计算四条边的边长,,,,计算方式如下:
3.根据权利要求1所述的室外无人清扫车遍历清扫路线自适应生成的方法,其特征在于,步骤s2具体包括:引入清扫时的路线宽度,将最短边根据路线宽度使边界四边形分成个区域,,将最短边和最短边的对边都均匀插点生成规划控制点,使两条线段上的总点数均为。
4.根据权利要求3所述的室外无人清扫车遍历清扫路线自适应生成的方法,其特征在于,步骤s3具体包括:将最短边和最短边的对边的点一对一连接,将同一条边上的非相邻点进行连接,从而得到一条连续的交叉回形曲线,曲线由当前所有点的控制点集合组成,即:
5.据权利要求4所述的室外无人清扫车遍历清扫路线自适应生成的方法,其特征在于,步骤s4具体包括:
技术总结
本发明提供一种室外无人清扫车遍历清扫路线自适应生成的方法,包括如下步骤:划定无人清扫车遍历区域形成边界四边形,分析计算出边界四边形最短边及其对边;基于清扫时的路线宽度设置分割点,在边界四边形最短边与其对边线段均匀插点生成规划的控制点;对控制点顺序采样得到一条连续的交叉回形曲线;基于最小转弯半径对曲线的顺序点集合进行运动学约束优化生成遍历路径曲线。本发明通过考虑到无人车的转弯半径,无人车的宽度,运动学约束等自身因素,自适应的生成一条合适的遍历路线,帮助室外清扫车在路径较短的同时覆盖率高的遍历清扫整个工作。
技术研发人员:郑勇飞,司书哲,王磊,王维
受保护的技术使用者:睿羿科技(山东)有限公司
技术研发日:
技术公布日:2024/5/16
- 还没有人留言评论。精彩留言会获得点赞!