一种大规模环境湿度监测方法与系统与流程
本发明涉及环境湿度监测领域,尤其涉及一种大规模环境湿度监测方法与系统。
背景技术:
1、室内环境监测是指对室内温湿度等参数进行实时监测和评估的过程,旨在保障人们在室内环境中的舒适性和健康安全。通过对室内环境参数的监测,可以及时发现并解决潜在的问题,同时,还可以为改善室内环境提供科学依据,如调节空调系统、优化通风设备等。现有室内环境温湿度监测以小规模住宅监测为主,依赖于专业的检测设备对室内进行局部检测,无法直接应用于大规模室内厂房。
技术实现思路
1、针对该问题,本发明提出一种大规模环境湿度监测方法与系统,通过室内厂房自主导航实现大规模环境识别智能化监测,帮助人们及时采取措施,维护良好的室内环境。有鉴于此,本发明提供一种大规模环境湿度监测方法,目的在于对采集的环境湿度数据进行缺失值估计得到室内环境湿度分布的监测结果,并通过扩展路径规划算法中的搜索邻域以及优化启发式函数,实现全局粗粒度导航路径生成,结合三角剖分方式衡量环境湿度数据对不同位置的缺失值的影响,实现缺失湿度值估计,得到室内环境湿度分布的监测结果。
2、为实现上述目的,本发明提供的一种大规模环境湿度监测方法,包括以下步骤:
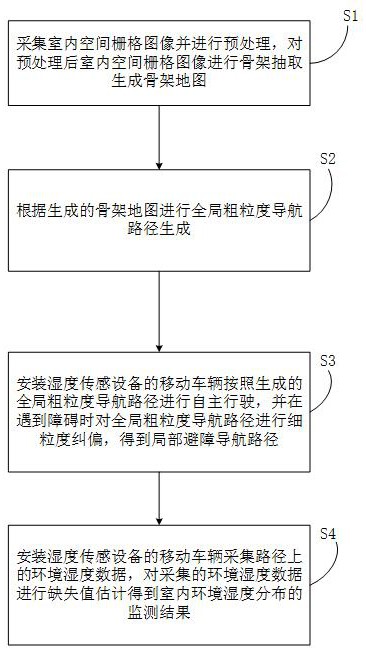
3、s1:采集室内空间栅格图像并进行预处理,对预处理后室内空间栅格图像进行骨架抽取生成骨架地图;
4、s2:根据生成的骨架地图进行全局粗粒度导航路径生成,其中改进的a*算法为所述粗粒度导航路径生成的主要实施方法;
5、s3:安装湿度传感设备的移动车辆按照生成的全局粗粒度导航路径进行自主行驶,并在遇到障碍时对全局粗粒度导航路径进行细粒度纠偏,得到局部避障导航路径;
6、s4:安装湿度传感设备的移动车辆采集路径上的环境湿度数据,对采集的环境湿度数据进行缺失值估计得到室内环境湿度分布的监测结果。
7、作为本发明的进一步改进方法:
8、可选地,所述s1步骤中采集室内空间栅格图像并进行预处理,包括:
9、采集室内空间栅格图像,其中所采集室内栅格图像数据的表示形式为:
10、
11、其中:
12、表示所采集室内栅格图像数据,室内栅格图像数据x为n行m列的矩阵形式,n表示室内环境中水平方向的栅格数目,m表示室内环境中竖直方向的栅格数目;
13、表示室内栅格图像数据中第n行第m列栅格的图像信息表示,表示室内栅格图像数据中第n行第m列栅格无法通行,表示室内栅格图像数据中第n行第m列栅格可以通行;
14、对所采集室内空间栅格图像进行预处理,其中预处理流程为:
15、设置结构矩阵:
16、
17、基于结构矩阵对室内空间栅格图像x中的任意图像信息表示进行预处理,得到预处理后的室内空间栅格图像,其中图像信息表示的预处理公式为:
18、
19、其中:
20、表示图像信息表示的预处理结果;
21、表示室内空间栅格图像x中以图像信息表示为中心的邻域区域;
22、表示卷积操作;
23、表示选取中的最大值作为邻域区域中心的元素值,所得到更新后的邻域区域;
24、表示邻域区域与卷积结果中的最小值;
25、对预处理后室内空间栅格图像进行骨架抽取生成骨架地图。
26、可选地,所述s1步骤中对预处理后室内空间栅格图像进行骨架抽取生成骨架地图,包括:
27、对预处理后的室内空间栅格图像进行骨架抽取生成骨架地图,其中骨架地图生成流程为:
28、s11:生成n行m列的初始矩阵a,其中初始矩阵中每个矩阵元素的元素值均为0;
29、s12:从预处理后的室内空间栅格图像中进行骨架信息提取,对初始矩阵a中的矩阵元素进行骨架信息填充,得到初始矩阵a的骨架信息填充后结果,其中初始矩阵a中第n行第m列矩阵元素的骨架信息填充结果为:
30、
31、
32、其中:
33、表示初始矩阵a中第n行第m列矩阵元素的骨架信息填充结果;
34、表示预处理后室内空间栅格图像中以为中心的邻域区域;
35、s13:将骨架信息填充后的矩阵作为所生成的骨架地图。在本发明实施例中,骨架地图中的每个元素对应一个栅格。
36、可选地,所述s2步骤中根据骨架地图进行全局粗粒度导航路径生成,包括:
37、根据骨架地图进行全局粗粒度导航路径生成,其中全局粗粒度导航路径生成流程为:
38、s21:在骨架地图设置起始点位置以及终止点位置序列,其中终止点位置序列中包含k个终止点位置,表示终止点位置序列中的第k个终止点位置;
39、s22:初始化list列表以及open列表,将起始点位置加入到open列表中,并将骨架地图中骨架信息填充结果不为1的元素位置加入到list列表中;
40、s23:从open列表中提取最近加入open列表的位置作为起点,其中起点的元素位置为,对元素位置进行邻域扩展,其中的扩展范围为,j的扩展范围为,去除邻域扩展后在斜对角线方向的四组邻域顶点位置,构成元素位置的20个邻域点,其中表示元素位置的第h个邻域点,;
41、s24:计算起点的每个邻域点的启发式函数值,其中邻域点的启发式函数值为:
42、其中:
43、表示邻域点的启发式函数值;
44、表示邻域点与起始点位置之间的欧式距离;
45、表示邻域点与位置之间的欧式距离,表示终止点位置序列中距离起点最近且未加入到open列表的终止点位置;
46、s25:将启发式函数值最小的邻域点加入到open列表中,并在list列表中删去所加入的邻域点;
47、s26:重复步骤s23至步骤s25,直到将终止点位置序列中的所有终止点位置加入到open列表;
48、s27:按照加入open列表先后顺序对open列表中的位置进行排序,构成全局粗粒度导航路径,其中全局粗粒度导航路径的表示形式为:
49、
50、其中:
51、表示全局粗粒度导航路径,表示全局粗粒度导航路径中的u个路径节点。在本发明实施例中,每个路径节点对应一个栅格。
52、可选地,所述s3步骤中安装湿度传感设备的移动车辆按照生成的全局粗粒度导航路径进行自主行驶,并在遇到障碍时对全局粗粒度导航路径进行细粒度纠偏,包括:
53、安装湿度传感设备的移动车辆按照生成的全局粗粒度导航路径进行自主行驶,并在行驶过程中实时对前方障碍进行检测,在遇到障碍时对全局粗粒度导航路径进行细粒度纠偏,将细粒度纠偏结果作为局部避障导航路径;
54、若在路径节点与之间路径检测到障碍,则全局粗粒度导航路径中路径节点与之间路径的细粒度纠偏流程为:
55、s31:计算得到路径节点之间的斜率,其中路径节点与之间的斜率为:
56、
57、
58、其中:
59、为路径节点与障碍物之间的斜率;
60、为路径节点在骨架地图中的列序,为路径节点在骨架地图中的行序;
61、表示检测到障碍位置骨架地图中的列序,表示检测到障碍位置骨架地图中的行序;
62、s32:计算得到偏向角的正切值:
63、
64、其中:
65、表示偏向角的正切值;
66、表示移动车辆在检测到障碍时,对原路径进行角度纠偏的偏向角;
67、s33:计算得到移动车辆在检测到障碍时,对原路径进行角度纠偏的偏向角:
68、
69、并按照偏向角进行细粒度纠偏,将细粒度纠偏结果作为局部避障导航路径;
70、将细粒度纠偏后的全局粗粒度导航路径作为移动车辆采集路径,移动车辆按照移动车辆采集路径进行移动。
71、可选地,所述s4步骤中安装湿度传感设备的移动车辆采集路径上的环境湿度数据,包括:
72、安装湿度传感设备的移动车辆采集路径上的环境湿度数据,所述移动车辆采集路径为移动车辆移动过程中的路径,其中环境湿度数据的采集流程为:
73、移动车辆在移动过程中实时接收空气中的水蒸气,当水蒸气吸附在湿度传感设备中湿敏电阻的感湿膜上时,会导致湿敏电阻的电阻率以及电阻值发生变化,根据变化结果计算得到移动车辆采集路径上不同位置的湿度值,构成环境湿度数据,所采集环境湿度数据的表示形式为:
74、
75、其中:
76、表示环境湿度数据;
77、表示移动车辆采集路径所经过的s个连续栅格的湿度值序列,表示移动车辆采集路径上第s个栅格的湿度值,s表示移动车辆采集路径所经过的栅格总数;
78、对采集的环境湿度数据进行缺失值估计得到室内环境湿度分布的监测结果。
79、可选地,所述s4步骤中对采集的环境湿度数据进行缺失值估计得到室内环境湿度分布的监测结果,包括:
80、对采集的环境湿度数据进行缺失值估计,得到室内环境湿度分布的监测结果,其中缺失值估计流程为:
81、s41:将移动车辆采集路径所经过的s个连续栅格的湿度值序列映射到室内空间栅格图像中的s个对应栅格中,作为s个栅格的湿度值;
82、s42:对于缺失湿度值的任意栅格,以该栅格为顶点,以步骤s41中存在湿度值的任意栅格为另一个顶点,对室内空间栅格图像进行delaunay三角形区域划分,划分s个三角形区域;在本发明实施例中,表示室内空间栅格图像中的第p行第q列的栅格;
83、s43:对栅格进行缺失值估计,其中缺失值估计公式为:
84、
85、其中:
86、表示栅格的缺失值估计结果;
87、表示第s个存在湿度值的栅格对栅格湿度值的影响权重,为影响子权重;
88、表示栅格与第s个存在湿度值的栅格所构成的三角形区域占室内空间栅格图像的面积比例;
89、表示栅格与第s个存在湿度值的栅格之间的连线长度;
90、s44:重复步骤s42-s43,得到室内空间栅格图像中每个栅格的湿度值,作为室内环境湿度分布的监测结果。
91、为了解决上述问题,本发明提供一种大规模环境湿度监测系统,所述系统包括:
92、环境信息提取模块,用于采集室内空间栅格图像并进行预处理,对预处理后室内空间栅格图像进行骨架抽取生成骨架地图;
93、导航控制模块,用于根据生成的骨架地图进行全局粗粒度导航路径生成,安装湿度传感设备的移动车辆按照生成的全局粗粒度导航路径进行自主行驶,并在遇到障碍时对全局粗粒度导航路径进行细粒度纠偏,得到局部避障导航路径;
94、湿度监测装置,用于安装湿度传感设备的移动车辆采集路径上的环境湿度数据,对采集的环境湿度数据进行缺失值估计得到室内环境湿度分布的监测结果。
95、为了解决上述问题,本发明还提供一种电子设备,所述电子设备包括:
96、存储器,存储至少一个指令;
97、通信接口,实现电子设备通信;及
98、处理器,执行所述存储器中存储的指令以实现上述所述的大规模环境湿度监测方法。
99、为了解决上述问题,本发明还提供一种计算机可读存储介质,所述计算机可读存储介质中存储有至少一个指令,所述至少一个指令被电子设备中的处理器执行以实现上述所述的大规模环境湿度监测方法。
100、相对于现有技术,本发明提出一种大规模环境湿度监测方法,该技术具有以下优势:
101、首先,本方案提出一种栅格图像的骨架地图提取方式以及全局路径规划方式,对所采集室内空间栅格图像进行滤波处理,过滤其中的噪声栅格以及离群栅格,进而进行骨架抽取,所抽取骨架为室内不可通行的路径,实现室内可通行路径的表示,根据生成的骨架地图,通过骨架抽取实现了室内可通行路径空间提取,为后续路径规划提供形式化基础同时大大降低了计算复杂度;并对传统路径规划算法进行优化,扩展搜索邻域以及优化启发式函数,在路径规划的初期,偏重于抵达终止点位置的区域,在路径规划的后期,偏重于实现路径最短的区域,实现全局粗粒度导航路径生成,提高全局导航路径规划效率。同时,本方案提出一种缺失湿度值估计方法,安装湿度传感设备的移动车辆按照生成的全局粗粒度导航路径进行自主行驶,并在遇到障碍时,结合路径节点的斜率生成避障偏向角,对全局粗粒度导航路径进行细粒度纠偏,实现主动避障,提高了运行安全性,并通过安装湿度传感设备的移动车辆采集路径上的环境湿度数据,结合三角剖分方式衡量环境湿度数据对缺失值的影响,实现缺失值估计,得到室内环境湿度分布的监测结果,提高湿度分布监测的准确性。
- 还没有人留言评论。精彩留言会获得点赞!