一种绝对静力水准器的绝对标定值和绝对高程的获取方法
本发明涉及测量,具体涉及一种绝对静力水准器的绝对标定值和绝对高程的获取方法。
背景技术:
1、当前,隧道的高程测量主要依赖几何水准,常用手段主要有水准仪和激光跟踪仪。在进行隧道网点的高程测量时,先计算出当前网点的高程,再通过当前网点的高程计算下一网点的高程,也即通过转站进行高程传递,但是随着搭接站数和水准距离增大,误差也随之累积。
2、为降低误差,国外提出基于激光、引张线的直线隧道基准方法,可同时提高平面和高程向隧道控制网精度。但是该方法在面对环形装置,由于引张线和激光准直系统多段搭接困难,并涉及光学元件的调整、光路的偏转和搭接,极易引入未知误差,应用难度很大。
技术实现思路
1、本发明主要解决的技术问题是:由于几何水准转站搭接的站数过多,导致高程计算结果误差大。
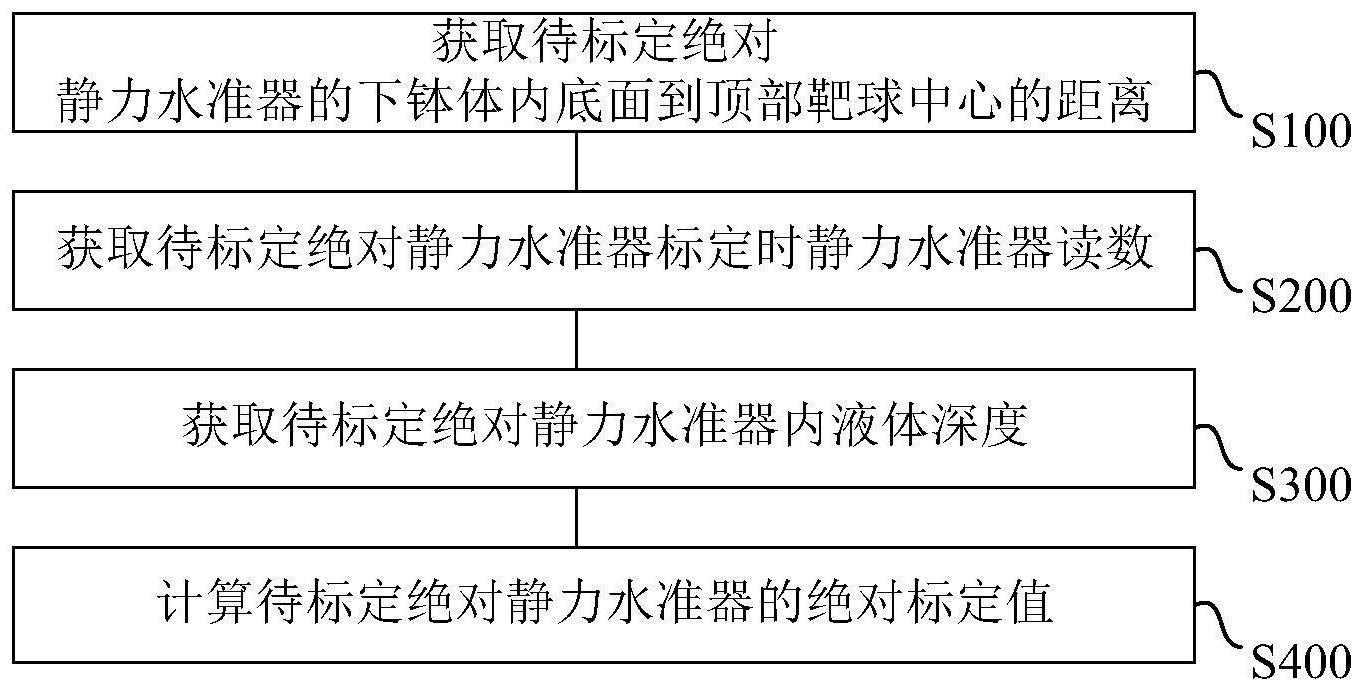
2、根据第一方面,一种实施例中提供一种绝对静力水准器的绝对标定值的获取方法,包括:
3、获取待标定绝对静力水准器的下钵体内底面到顶部靶球中心的距离mdk;
4、获取待标定绝对静力水准器标定时绝对静力水准器读数rk;
5、获取待标定绝对静力水准器内液体深度wk;
6、通过如下公式计算得到所述待标定绝对静力水准器的绝对标定值:
7、ak=mdk-rk-wk
8、其中,ak表示所述待标定绝对静力水准器的绝对标定值。
9、一种实施例中,所述获取待标定绝对静力水准器的下钵体内底面到顶部靶球中心的距离mdk,包括:
10、获取所述待标定绝对静力水准器的下钵体内底面的测量点;
11、根据所述测量点拟合坐标系;
12、在所述坐标系中获取靶球边界坐标;
13、根据所述靶球边界坐标拟合靶球中心坐标;
14、根据所述靶球中心坐标确定所述待标定绝对静力水准器的下钵体内底面到顶部靶球中心的距离mdk。
15、一种实施例中,所述获取待标定绝对静力水准器标定时绝对静力水准器读数rk,包括:
16、所述待标定绝对静力水准器在标定时,所述待标定绝对静力水准器内液体的液面高度位于所述待标定绝对静力水准器的测量量程之内;
17、在所述待标定绝对静力水准器内液体稳定后,获取所述待标定绝对静力水准器读数rk。
18、一种实施例中,所述获取待标定绝对静力水准器内液体深度wk,包括:
19、获取万用表表针从所述待标定绝对静力水准器下钵体的设计基准面移动到接触所述待标定绝对静力水准器下钵体内液体的液面时,万用表表针的移动距离;
20、根据所述待标定绝对静力水准器下钵体的设计基准面到待标定绝对静力水准器下钵体内底面的距离,和所述万用表表针的移动距离,确定所述待标定绝对静力水准器内液体深度wk。
21、一种实施例中,所述万用表表针的移动距离通过三坐标测量仪或位移台确定。
22、一种实施例中,所述获取待标定绝对静力水准器内液体深度wk,包括:
23、获取同轴位移传感器在距离液体中间深度第一设定距离处确定的第一液体深度;
24、获取同轴位移传感器在距离液体中间深度第二设定距离处确定的第二液体深度;
25、获取同轴位移传感器在距离液体中间深度第三设定距离处确定的第三液体深度;其中,所述第一设定距离小于所述第二设定距离,所述第二设定距离小于所述第三设定距离;且所述第二设定距离减去所述第一设定距离的差值,与所述第三设定距离减去所述第二设定距离的差值相等;
26、根据所述第一液体深度、第二液体深度和第三液体深度确定所述待标定绝对静力水准器内液体深度wk。
27、一种实施例中,所述获取待标定绝对静力水准器内液体深度wk,包括:
28、根据同轴位移传感器确定在所述待标定绝对静力水准器未加入液体时,所述待标定绝对静力水准器下钵体底面到所述同轴位移传感器探头的第一距离;
29、根据同轴位移传感器确定在所述待标定绝对静力水准器加入液体时,所述待标定绝对静力水准器下钵体内液体的液面到所述同轴位移传感器探头的第二距离;
30、根据所述第一距离和所述第二距离确定待标定绝对静力水准器内液体深度wk。
31、一种实施例中,所述获取待标定绝对静力水准器内液体深度wk,包括:
32、当所述待标定绝对静力水准器下钵体内液体的液面高度小于所述待标定绝对静力水准器内液体的测量量程的设定值时,在所述待标定绝对静力水准器的下钵体内放置标准加高垫块,使得所述液体的液体深度在所述同轴位移传感器的量程之内,并且使得所述液体的液面高度在所述待标绝对静力水准器的量程之内。
33、根据第二方面,一种实施例中提供一种绝对静力水准器的绝对高程的获取方法,包括:
34、获取待标定绝对静力水准器的下钵体内底面到顶部靶球中心的距离mdk;
35、获取待标定绝对静力水准器标定时绝对静力水准器读数rk;
36、获取待标定绝对静力水准器内液体深度wk;
37、通过如下公式计算得到所述待标定绝对静力水准器的绝对标定值:
38、ak=mdk-rk-wk
39、其中,ak表示所述待标定绝对静力水准器的绝对标定值;
40、获取待标定绝对静力水准器测量时绝对静力水准器读数ri_k;
41、通过如下公式计算得到所述待标定绝对静力水准器的绝对高程:
42、hi_k=ak+ri_k
43、其中,hi_k表示所述待标定静力水准器的绝对高程。
44、根据上述实施例的一种绝对静力水准器的绝对标定值和绝对高程的获取方法,通过获取绝对静力水准器下钵体内底面到顶部靶球中心的距离、标定时绝对静力水准器读数和绝对静力水准器内液体深度,可直接计算出绝对静力水准器的绝对标定值,再获取绝对静力水准器测量时绝对静力水准器读数,可直接计算出当前点位的绝对高程。不需要通过高程传递的方式进行点位高程的计算,使得绝对高程的计算结果更加准确。
技术特征:
1.一种绝对静力水准器的绝对标定值的获取方法,其特征在于,包括:
2.如权利要求1所述的绝对静力水准器的绝对标定值的获取方法,其特征在于,所述获取待标定绝对静力水准器的下钵体内底面到顶部靶球中心的距离mdk,包括:
3.如权利要求1所述的绝对静力水准器的绝对标定值的获取方法,其特征在于,所述获取待标定绝对静力水准器标定时绝对静力水准器读数rk,包括:
4.如权利要求1所述的绝对静力水准器的绝对标定值的获取方法,其特征在于,所述获取待标定绝对静力水准器内液体深度wk,包括:
5.如权利要求4所述的绝对静力水准器的绝对标定值的获取方法,其特征在于,所述万用表表针的移动距离通过三坐标测量仪或位移台确定。
6.如权利要求1所述的绝对静力水准器的绝对标定值的获取方法,其特征在于,所述获取待标定绝对静力水准器内液体深度wk,包括:
7.如权利要求1所述的绝对静力水准器的绝对标定值的获取方法,其特征在于,所述获取待标定绝对静力水准器内液体深度wk,包括:
8.如权利要求6或7所述的绝对静力水准器的绝对标定值的获取方法,其特征在于,所述获取待标定绝对静力水准器内液体深度wk,包括:
9.如权利要求1所述的绝对静力水准器的绝对标定值的获取方法,其特征在于,在获取待标定绝对静力水准器标定时绝对静力水准器读数rk后,获取待标定绝对静力水准器内液体深度wk。
10.一种绝对静力水准器的绝对高程的获取方法,其特征在于,包括:
技术总结
一种绝对静力水准器的绝对标定值和绝对高程的获取方法,涉及测量技术领域。获取待标定绝对静力水准器的下钵体内底面到顶部靶球中心的距离MD<subgt;k</subgt;;获取待标定绝对静力水准器标定时,该液位高度下静力水准器读数R<subgt;k</subgt;;获取待标定绝对静力水准器内液体深度W<subgt;k</subgt;;即可获得每个待标定绝对静力水准器的绝对标定值A<subgt;k</subgt;:A<subgt;k</subgt;=MD<subgt;k</subgt;‑W<subgt;k</subgt;‑R<subgt;k</subgt;;多个待标定绝对静力水准器连接形成绝对静力水准系统,获取待标定绝对静力水准器测量时绝对静力水准器读数R<subgt;i_k</subgt;;通过如下公式计算得到绝对静力水准器的绝对高程:H<subgt;i_k</subgt;=A<subgt;k</subgt;+R<subgt;i_k</subgt;,其中,H<subgt;i_k</subgt;表示待测静力水准器的绝对高程。本申请可直接计算出当前点位的绝对高程,不需要通过高程传递的方式获得点位高程,使得绝对高程的计算结果更加准确。
技术研发人员:马娜,金伟其,董岚,王铜,李波,王小龙,门玲鸰,梁静,柯志勇,何振强,卢尚,韩圆颖,闫路平,张露彦,刘晓阳,闫皓月
受保护的技术使用者:北京理工大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!