一种基于PDOP贡献度的卫星分步选星方法
一种基于pdop贡献度的卫星分步选星方法
技术领域
1.本发明属于全球导航卫星系统技术领域,尤其涉及一种基于pdop贡献度的卫星分步选星方法。
背景技术:
2.全球导航卫星系统(global navigation satellite system,gnss)是一个世界范围的定位和定时系统,包含一个或多个卫星星座,随着各国卫星导航系统星座的完善,太空中可供定位的卫星数量不断增加。过多的卫星会导致定位解算时间的增加,产生的延迟误差对于高速运动的飞机而言是不能忽视的。
3.现有的卫星接收机由于通道数的增加,多是使用所有可以观测到的卫星进行定位解算。但由于过多的卫星带来的延时问题,需要对可观测卫星进行选择。选择的要求是要兼顾定位精度和解算卫星数量两方面的内容。在保证定位精度不受过多影响的情况下,使用较少的卫星进行解算。这就意味着要选出对定位精度提升较高的卫星进行解算。
4.几何精度因子(geometric dilution of precision,gdop)是用来描述gnss定位精度的物理量,它直接影响到gnss定位精度。其中位置精度因子(position dilution of precision,pdop)仅与参与解算的可见星位置有关,在伪距测量误差和钟差不变的情况下可见星几何构型直接影响到gnss定位精度。因此对可见星进行选择时,以较好的pdop作为选星目标。
技术实现要素:
5.本发明的目的在于提出一种基于pdop贡献度的卫星分步选星方法,对可见卫星进行选择,选取部分可见星参与定位解算,在保障精度的前提下,减小定位解算时间,降低由于解算延时带来的位置误差。
6.为实现上述目的,本发明提供了一种基于pdop贡献度的卫星分步选星方法,包括以下步骤:
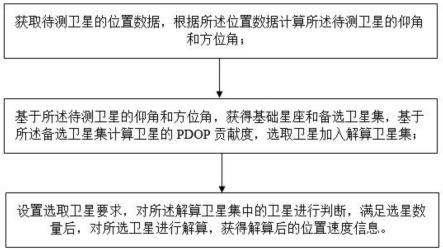
7.获取待测卫星的位置数据,根据所述位置数据计算所述待测卫星的仰角和方位角;
8.基于所述待测卫星的仰角和方位角,获得基础星座和备选卫星集,基于所述备选卫星集计算卫星的pdop贡献度,选取卫星加入解算卫星集;
9.设置选取卫星要求,对所述解算卫星集中的卫星进行判断,满足选星数量后,对所选卫星进行解算,获得解算后的位置速度信息。
10.可选的,所述待测卫星的位置数据包括:
11.卫星位置坐标xi(t),yi(t),zi(t),伪距观测值si(t),接收机先验位置x,y,z。
12.可选的,据所述位置数据计算所有卫星的仰角和方位角,具体计算如下,对于第i颗卫星,卫星仰角θi为:
13.卫星方位角αi为:
14.可选的,基于所述待测卫星的仰角和方位角,获得基础星座和备选卫星集,具体包括:
15.比较所述待测卫星的仰角,获得基础星座;
16.将其余卫星中仰角大于35
°
的卫星纳入备选卫星集。
17.可选的,所述基础星座包括:天顶星和底角星,
18.其中,选取仰角最大的卫星作为所述基础星座中的天顶星;
19.在其余卫星中,根据仰角选取三颗分布最均匀的作为所述基础星座中的底角星。
20.可选的,基于所述备选卫星集计算卫星的pdop贡献度,选取卫星加入解算卫星集,具体包括:
21.对所述备选卫星集解算卫星的pdop贡献度,获取所述pdop贡献度最大的卫星;
22.将所述卫星加入所述解算卫星集,获得新组合pdop值。
23.可选的,对所述解算卫星集中的卫星进行判断,获得解算后的位置速度信息,判断方法具体包括:
24.对所述解算卫星集中的卫星进行位置迭代解算,满足所述选取卫星要求则对所述解算卫星集进行解算获得解算后的位置速度信息;反之则重新计算其余卫星的pdop贡献度直到满足所述选取卫星要求。
25.本发明技术效果:本发明公开了一种基于pdop贡献度的卫星分步选星方法,以pdop为标准,选取对卫星组合pdop改善更大的卫星参与解算,提高每一颗参与解算的卫星对定位精度的贡献;控制参与解算的卫星数量,在定位精度和解算时间中取得平衡可以降低卫星接收机芯片的算力要求,降低成本与功耗;本发明拥有较好的实时性和选星质量稳定性,能够有效减小由于计算延时带来的误差。
附图说明
26.构成本技术的一部分的附图用来提供对本技术的进一步理解,本技术的示意性实施例及其说明用于解释本技术,并不构成对本技术的不当限定。在附图中:
27.图1为本发明实施例基于pdop贡献度的卫星分步选星方法的流程示意图;
28.图2为本发明实施例分布选星算法示意图。
具体实施方式
29.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本技术。
30.需要说明的是,在附图的流程图示出的步骤可以在诸如一组计算机可执行指令的计算机系统中执行,并且,虽然在流程图中示出了逻辑顺序,但是在某些情况下,可以以不同于此处的顺序执行所示出或描述的步骤。
31.如图1所示,本实施例中提供一种基于pdop贡献度的卫星分步选星方法,包括以下步骤:
32.s1、获取当前接收机与各可见卫星的距离,各可见卫星当前位置等实验数据;
33.实验数据为参与解算的数据,每次参与解算的数据包括:
34.(a)卫星位置坐标xi(t),yi(t),zi(t),其含义为t时刻时卫星i(i为卫星索引号)在地心地固系下的位置坐标。
35.(b)伪距观测值si(t),为当前时刻t下,卫星i与接收机的观测距离,由接收机输出。
36.本发明下述实施例步骤中涉及的伪距观测值为经过电离层误差、对流层误差、卫星钟差修正等修正之后用于解算的伪距值。具体修正内容根据所要求的精度级别而不同。伪距修正步骤为卫星导航解算的必要步骤,具体需参照卫星导航定位算法。本发明适宜使用在伪距观测值修正步骤之后与伪距参与位置解算步骤之前。未经修正的伪距观测值也可使用,但可能将降低发明效果。
37.(c)接收机先验位置x0(t),y0(t),z0(t),代表t时刻接收机在地心地固系下的位置坐标。接收机先验位置可以采用当前时刻预测定位结果,包括但不限于gnss系统当前时刻实测数据定位结果、其他传感器当前时刻定位结果,gnss系统当前时刻预测结果等。
38.本实施例采用上一时刻的卫星定位系统解算的接收机位置为先验位置。
39.本实施例采用gps31颗卫星与beidou44颗卫星的官方公布历书数据,进行卫星星座仿真。为了表现基于pdop贡献度的卫星分步选星算法效果,选取民用客机在对gnss精度要求较高的进近阶段航迹进行仿真,从而验证选星算法对定位精度的改善情况,航迹如图2所示。
40.s2、计算所有可见星的仰角和方位角;
41.对于第i颗卫星,仰角计算方法为:方位角计算方法为:
42.s3、根据所有卫星的仰角与方位角,挑选四颗星作为基础星座卫星;
43.s31、比较所有卫星仰角,选择仰角最大的卫星为基础星座选择;
44.s32、在剩余可见星中,将仰角小于35
°
的卫星纳入备选卫星集中。在备选卫星集中,选取三颗卫星方位角间距最接近120
°
的组合。对方位角在0
°
至120
°
之间的卫星选取与其方位角差最接近
±
120
°
的两颗卫星作为底角星选择。计算三颗卫星间的方位角差值与120
°
的差,作为该底角星组合的δi。比较所有底角星组合的,选取δi最小的底角星组合作为基础星座的底角星组合。
45.s4、计算其余卫星的pdop贡献度,选取贡献度高的卫星添加到解算卫星集中;
46.设接收机位置为x,y,z,对于第i颗卫星,卫星位置坐标为xi(t),yi(t),zi(t),伪距观测值为si(t)。那么观测矩阵h可写为:
[0047][0048]
令(h
t
h)-1
=h
hh
,h
hh
主对角线上的元素分别为h
11
、h
22
、h
33
、h
44
,那么:
[0049][0050]
位置误差系数(position dilution of precision,pdop)为:
[0051][0052]
当参与解算的卫星数量为n时,观测矩阵可改写为:
[0053][0054]
在增加一颗可见星后,观测矩阵h变为:
[0055][0056]
其中h
n+1
=[sinα
n+1
cosθ
n+1 cosα
n+1
cosθ
n+1 sinθ
n+1 1]。
[0057]
那么有n+1颗可见星时值为:
[0058][0059]
根据sherman-morrison公式可得:
[0060]
[0061]
所以在增加可见星后对dop值的影响可由δh
n+1
对角线上元素大小得出。对角线上元素数值越大,主对角线上元素数值越小,dop值越小。因此在备选卫星集中选择对dop值改善最明显的卫星时,可以通过计算各卫星的δh
n+1
矩阵得出该卫星的dop贡献度,选择贡献度最大的卫星加入解算卫星集合。
[0062]
s5、根据需要设置选星上限,解算卫星数量没有达到上限重复s4,达到上限后进入s6;
[0063]
根据需要设置选星上限n,在当前选星数量不足n的情况下,回到s4继续选星,在数量达到n时,进入s6进行定位解算。
[0064]
s6、对解算卫星集中的卫星进行定位迭代解算,输出解算后的位置速度信息;
[0065]
对于第i颗卫星而言,观测方程如下:
[0066]
zi=hix+εi[0067]
其中zi为第i颗卫星的伪距测量值,hi为第i颗卫星的观测值,εi为第i颗卫星的观测误差。
[0068]
那么第i颗卫星观测方程为:
[0069][0070]
由于si(t)为非线性函数,需将其泰勒级数展开可得:
[0071][0072]
其中s
i0
(t)为si(t)的泰勒展开零阶常数项,x,y,z为当前接收机地心地固坐标系下接收机的位置,xi(t),yi(t),zi(t)为卫星位置坐标,伪距观测值为si(t)。第i颗卫星的观测向量位置估计量那么观测矩阵h可
写为:
[0073]
令p(t)=p(t)-s0(t)作为位置迭代计算的中间变量,则:
[0074][0075]
其中x
(k)y(k)z(k)
为经过k次迭代计算后地心地固坐标系下接收机三维位置,为经过k次迭代计算后第i颗卫星与接收机的计算距离。
[0076][0077]
那么:
[0078]
p(t)=[p1(t) p2(t)
ꢀ…ꢀ
pn(t)]
t
=hx+δ
[0079]
根据观测方程式位置估计量:
[0080][0081]
其中为当前迭代解算结果。
[0082]
在位置迭代解算过程中,经过k次迭代计算后观测矩阵h
(k)
为:
[0083][0084]
第k次迭代计算的应为:
[0085][0086]
经过k次位置迭代计算后接收机地心地固坐标系下三维位置x
(k)
应为:
[0087][0088]
其中x
(k-1)
为k-1次位置迭代计算后接收机地心地固坐标系下三维位置,为第k次位置迭代通过解算出的估计结果。当k=1即第一次位置迭代计算时,x
(0)
一般取上一时刻接收机位置作为位置迭代初始值。
[0089]
当第k次位置迭代计算的位置估计结果中各项值均小于10-3
m时,迭代解算结束,x
(k)
为当前时刻接收机解算出的地心地固坐标系下三维位置和接收机钟差。
[0090]
最终的实验结果如下表1所示。
[0091]
表1
[0092] 解算时间(s)水平位置误差(m)下落阶段垂直位置误差(m)本文方法0.019612.7017.259全星解算0.041616.9457.752提升度52.88%25.02%6.41%
[0093]
本发明公开了一种基于pdop贡献度的卫星分步选星方法,以pdop为标准,选取对卫星组合pdop改善更大的卫星参与解算,提高每一颗参与解算的卫星对定位精度的贡献。控制参与解算的卫星数量,在定位精度和解算时间中取得平衡可以降低卫星接收机芯片的算力要求,降低成本与功耗。与别的选星算法相比,拥有较好的实时性和选星质量稳定性,可以有效减小由于计算延时带来的误差。
[0094]
以上所述,仅为本技术较佳的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应该以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1