一种草地植被生长监测方法与流程
1.本发明涉及一种草地植被生长监测方法,特别涉及一种基于激光雷达原位观测的草地植被生长监测方法,属于激光雷达植被遥感领域。
背景技术:
2.草地作为陆地植被分类的主要类型,占据陆地生态系统中大部分碳储量,并被作为自然资源调查工作中的主要被研究对象。草地植被自然资源对气候和降水量等外界参数变化敏感,表现出明显的年际变化和季节变化等特点。因此,实现针对草地不同生长时期的生长过程监测,能够准确揭示草地植被完整的生长过程,对实现精确高效的草地自然资源调查具有重要意义。
3.覆盖度、叶面积指数和植被高度等物理类植被生态参数作为植被生态遥感研究中的主要指标,能够一定程度上客观地反应当下草地生态系统的生产力水平,且不同参数反演方法及其反应植被生长水平的能力均有所不同。草地生态系统在时间维度上表现出对外界条件变化的明显响应,在覆盖度和植被高度等植被参数上具有显著变化,因此通过对以上参数进行精确估算能够反映草地植被生长动态变化过程。
4.相较于卫星遥感利用相关遥感指数评价草地大尺度区域生长状况的方法,近地遥感观测能够在样方尺度更精细准确的反应草地植被生长变化。现有的近地遥感草地植被参数估算方法根据设备观测模式差异可分为基于被动光学与基于主动光学的两种观测方法。基于被动光学遥感的参数反演作为传统的监测草地植被生长的方法,一般利用数码相机等在目标样方设置固定采样点进行数字摄影实现。这种利用二维图像反演草地参数的方法主要通过分类图像中的植被和非植被区域,进行覆盖度和叶面积指数等参数的估算,从而达到评价当下植被生长状态的目的。然而,由于数字摄影常依赖于在固定样点的人工观测,其时间分辨率很难完整表征草地植被的具体生长过程。目前虽然有部分研究基于长期站点观测获取包含多个波段信息的数字影像,通过计算相关遥感指数来表示植被的具体生长变化,但这类方法仅能表示植被的二维结构特征信息,很难获取植被垂直结构特征,且传统光学图像的测量准确性取决于当下光照环境条件、曝光参数设置及图像处理算法等的普适性,这也造成了基于光学数字摄影评价草地植被生长状态充满了更多不确定性。
5.激光雷达(light detection and ranging,lidar)作为现有主流的主动光学遥感观测手段,因其短波长的激光脉冲具有透过植被和枝干之间间隙来穿透植被冠层的能力,可以准确描述植被冠层内部垂直结构,显示出克服上述被动光学遥感缺陷的潜力。虽然lidar能较好反应植被三维结构并有效估算相关结构参数,但受制于较高的硬件和数据获取成本,目前获取数据方式在时间上呈现离散特点,且不同时间获取的数据在扫描模式、点云密度和入射角等基本参数上也不尽相同,很难进行直接有效的综合应用,因此如何实现获取高时空分辨率的草地植被三维结构信息尚需解决;此外,草地植被空间分布较密集且多为低矮植被,对降水和温度等外界条件变化响应明显,这导致利用站载或机载等传统lidar观测模式很难捕捉草地植被短期生长变化过程,因此需要在已获取的高时空分辨率
lidar草地植被数据基础上,开发有效的垂直结构参数反演方法以准确捕捉草地的生长变化过程。
技术实现要素:
6.在下文中将给出关于本公开内容的简要概述,以便提供关于本公开内容某些方面的基本理解。应当理解,此概述并不是关于本公开内容的穷举性概述。它并不是意图确定本公开内容的关键或重要部分,也不是意图限定本公开内容的范围。其目的仅仅是以简化的形式给出某些概念,以此作为稍后论述的更详细描述的前序。
7.本发明目的在于针对现有草地植被生长变化监测手段的局限性,特别是针对现有利用激光雷达观测草地植被生长变化方法的不足,通过充分挖掘站点观测网络的优势来定量表征草地植被生长过程。首先,该方法基于所建立的激光雷达观测站点扫描目标样方,并利用无线传输网络获取逐日草地离散点云数据;其次,本方法利用相关激光点云处理算法并结合离散点云时序特征,建立逐日lidar点云标准化处理过程;最后,利用lidar参数反演方法反演逐日植株高度、垂直覆盖度和冠层体积等多种草地垂直结构参数,定量揭示草地植被生长变化过程。
8.为解决上述技术问题,本发明提供技术方案如下:
9.本发明提供一种草地植被生长变化监测方法,包括以下步骤:步骤一:通过lidar原位观测获取二进制离散点云数据,包括通过具有固定扫描视场角的lidar,在距地一定高度、以一定倾斜角度扫描目标样方,获取时空连续的逐日结构化二进制离散点云数据;步骤二:对步骤一获取的点云数据进行标准化处理,包括:先利用lidar已知的观测角度信息对步骤一获得的数据进行角度转换校正,得到角度基准统一的逐日离散点云数据集,然后进行噪声滤波消除非植被地物和随机噪声,最后结合时序信息进行地表高程归一化,获得标准化的点云数据;以及步骤三:草地植被垂直结构参数反演,利用反演结果表示植被生长过程变化趋势,其中,草地植被垂直结构参数反演包括植被植株整体高度反演、植被垂直覆盖度反演和植被体积反演;所述植株整体高度反演通过定量描述植被高度参数来表征,所述植被垂直覆盖度反演通过构建lidar穿透指数来表征,所述植被体积反演通过定量计算样方区域中冠层植被点云在三维空间上体积变化来表征。
10.进一步的,其中,对点云数据进行标准化处理之前,基于lidar硬件转换规则将步骤一的二进制离散点云数据转化为单回波las数据格式。
11.进一步的,其中,步骤二中进行角度转换校正的步骤包括:基于空间直角坐标变换原理建立空间旋转矩阵,对点云数据进行角度校正,得到角度基准统一的离散点云数据集,对于观测角度已知且观测频率固定的点云数据,根据围绕三维空间中x,y,z三轴的旋转角度及顺序,依次对围绕每个轴的旋转建立坐标变换式,如下式所示:
[0012][0013]
其中,和分别为角度转换前后点云数据的三维坐标;表示点云
数据分别围绕y,x,z轴旋转的角度值;r表示所建立的角度旋转矩阵,z轴方向为lidar激光脉冲发射扫描方向,绕z轴的旋转表示lidar沿脉冲发射方向的自身转动角度κ;绕y轴的旋转角表示lidar脉冲发射方位的倾斜角度绕x轴的旋转角表示lidar脉冲发射方向的观测方位角ω。
[0014]
进一步的,其中,步骤二中进行噪声滤波消除非植被地物和随机噪声的步骤包括:通过分析确定单日点云数据中的非植被地物区域位置,获取待滤波区域的固定坐标区间,剔除时序点云数据中的非植被地物;以及使用统计去除离群点算法去除随机噪声。
[0015]
进一步的,其中,所述随机噪声包括孤立和漂移噪点噪声,通过设置邻域搜索区域和标准差倍数去除所述孤立和漂移噪点噪声。
[0016]
进一步的,其中,步骤二中结合时序信息进行地表高程归一化的步骤包括:首先对植被凋落期数据进行地面滤波来准确提取地面点并插值生成基准数字高程模型;以及通过直接基于点云数据减去对应的基准数字高程模型的像元值。
[0017]
进一步的,其中,步骤三中植被高度参数的反演包括:在标准化的点云数据基础上构建二维栅格单元,将栅格单元作为参数计算基本处理单元进行植株高度的计算,通过统计每个栅格单元中所有点的平均值h
mean
和最大值h
max
来表示当下栅格中植株的高度特征分布,最终将所有栅格的高度特征参数进行综合,计算出当下样方区域中植株的高度特征分布。
[0018]
进一步的,其中,步骤三中构建lidar穿透指数的反演包括:通过对标准化的点云数据设置经验高度阈值以区分植被与地面点,实现对植被垂直覆盖度的反演,具体计算式如下:
[0019][0020]
其中,aci为所有回波覆盖指数;∑all为当前点云中所有点数量;single
canopy
、first
canopy
、intermediate
canopy
和last
canopy
分别表示植被冠层区域中单次回波点、首次回波点、中间回波点以及末次回波点的数量,对于草地植被的监测,将所有回波点均视为单次回波点,并设置合适的高度经验阈值区分植被与非植被点,由此计算当前时间的植被垂直覆盖度。
[0021]
进一步的,其中,步骤三中植被体积的反演包括:首先对样区内点云以体素为基本单元进行规则三维网格划分,统计每个网格内点云的高度特征值作为该网格体元值,并根据高度统计量与网格底面积乘积作为该网格体积,整体体积估算则由所有三维网格体积累加而来:
[0022][0023]
其中,v
all
为当前点云的草地植被体积;vi为第i个三维网格的植被体积;hi为第i个三维网格中植被的高度统计量;n为所建立的三维网格集合中子网格的总数量;s表示所建立的三维网格的底面积,这一参数由网格建立时所设置的网格步长确定。
[0024]
进一步的,其中,所述二维栅格单元为30
×
30cm大小。
[0025]
本发明提供了一种草地植被生长监测方法,不同于传统多时相lidar植被生长变化监测方法,本方法通过lidar原位观测能够获取时间连续的高时空分辨率离散点云数据,
并有效结合点云的时序特征信息对多种垂直结构参数进行准确反演,定量揭示草地植被的生长变化过程。该方法具有以下优点:1)能够获取时空连续的高分辨率草地植被点云数据;2)有效结合点云时序信息进行植被垂直结构参数反演,从三维角度准确揭示草地植被的生长变化过程。
附图说明
[0026]
参照附图下面说明本公开内容的具体内容,这将有助于更加容易地理解本公开内容的以上和其他目的、特点和优点。附图只是为了示出本公开内容的原理。在附图中不必依照比例绘制出单元的尺寸和相对位置。
[0027]
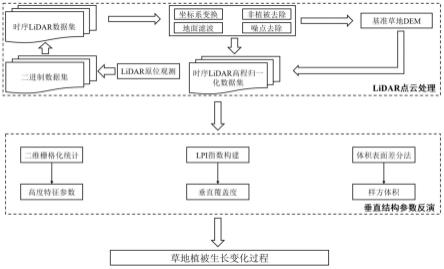
图1是本发明的流程示意图;
[0028]
图2是植被高度计算示意图;
[0029]
图3是逐日植被高度计算结果;
[0030]
图4是植被垂直覆盖度和样方体积计算结果。
具体实施方式
[0031]
在下文中将结合附图对本公开内容的示例性公开内容进行描述。为了清楚和简明起见,在说明书中并未描述实现本公开内容的所有特征。然而,应该了解,在开发任何这种实现本公开内容的过程中可以做出很多特定于本公开内容的决定,以便实现开发人员的具体目标,并且这些决定可能会随着本公开内容的不同而有所改变。
[0032]
在此,还需要说明的是,为了避免因不必要的细节而模糊了本公开内容,在附图中仅仅示出了与根据本公开内容的方案密切相关的管网结构,而省略了与本公开内容关系不大的其他细节。
[0033]
应理解的是,本公开内容并不会由于如下参照附图的描述而只限于所描述的实施形式。本文中,在可行的情况下,不同实施方案之间的特征可替换或借用、以及在一个实施方案中可省略一个或多个特征。
[0034]
下面结合附图详细阐述本发明的技术方案。
[0035]
本发明是实现一种基于激光雷达原位观测的草地植被生长变化监测方法。首先,该方法基于站点原位观测对目标样方进行持续扫描,自动无线传输获取逐日草地植被离散点云数据;其次,利用空间坐标变换和点云滤波算法并结合点云时序特征,建立时序lidar数据标准化处理过程;最后,通过对逐日点云中多种草地垂直结构参数如植株高度、垂直覆盖度和植被体积的准确反演,三维定量揭示草地植被生长变化过程。下面以原位lidar监测草地生长变化为具体实例进行说明,其流程如图1所示,具体的实施步骤如下:
[0036]
步骤一:通过lidar原位观测获取二进制离散点云数据。
[0037]
具体地,将具有固定扫描视场角的lidar架设于距地一定高度的站点观测塔顶,优选地,距地高度为5m,并以一定倾斜角度扫描目标样方,获取时空连续的逐日结构化二进制离散点云数据,优选地,倾斜角度为0
°
~12.5
°
,扫描时间分辨率为8小时,这样能够获取时空连续的高分辨率草地植被点云数据,便于后续从三维角度揭示植被生长变化。
[0038]
步骤二:对点云数据进行标准化处理。
[0039]
具体地,参见图1,lidar点云数据标准化处理过程可分为坐标旋转变换、噪声滤波
以及地表高程归一化三个主要部分进行。具体地,对步骤一获取的逐日结构化二进制离散点云数据,基于lidar设备制造商给定的硬件转换规则转化为单回波las数据格式,并综合考虑lidar扫描角、点云噪声以及点云时序特征信息,建立标准化数据处理过程,具体地,利用lidar架设于观测站点时已知的观测角度信息对原始数据进行角度转换校正。基于摄影测量理论中空间直角坐标变换原理建立空间旋转矩阵,对原始点云数据进行角度校正,最终得到角度基准统一的逐日离散点云数据集。对于观测角度已知且观测频率固定的点云数据,根据围绕三维空间中x,y,z三轴的旋转角度及顺序,依次对围绕每个轴的旋转建立坐标变换式,以上过程可被表达为下式:
[0040][0041]
其中,和分别为角度转换前后点云数据的三维坐标;表示点云数据分别围绕y,x,z轴旋转的角度值;r表示所建立的角度旋转矩阵。在实际lidar观测中,z轴方向为lidar激光脉冲发射扫描方向,绕z轴的旋转表示lidar沿脉冲发射方向的自身转动角度κ;绕y轴的旋转角表示lidar脉冲发射方位的倾斜角度绕x轴的旋转角表示lidar脉冲发射方向的观测方位角ω。一般在进行实际观测时,仅调整lidar的发射倾斜角和观测方位角ω,而设备本身不围绕观测方向进行转动,故κ一般为0,仅考虑和ω的数值大小。
[0042]
在坐标旋转变换后得到的离散点云基础上,进行噪声滤波消除非植被地物和随机噪声对数据处理的影响。噪声滤波根据分类过程分为两部分:对于持续进行站点观测所获取的逐日离散点云数据而言,lidar扫描一般会将观测塔本身以及样方围栏等非植被地物同时进行扫描采样,导致固定噪声区域的出现,通过分析确定单日点云数据中的非植被地物区域位置,获取待滤波区域的固定坐标区间,剔除时序点云数据中的非植被地物;而对于逐日点云中由于周围环境及扫描特性影响而形成的噪点,使用统计去除离群点算法去除这类随机噪声,通过设置邻域搜索区域和标准差倍数去除孤立和漂移噪点等噪声。
[0043]
结合时序信息进行地表高程归一化。对于没有明显垂直分层结构的草地植被,首先对植被凋落期数据进行地面滤波来准确提取地面点并插值生成数字高程模型(digital elevation model,dem)。考虑到植被生长旺季lidar脉冲难以穿透草地植被冠层到达地面,导致地面滤波算法难以有效分类地面点与非地面点,因此通过结合时序信息,利用在凋落期准确提取的dem来对整个生长期逐日点云数据进行处理。对凋落期点云进行地面滤波时,采用渐进加密三角网滤波算法分类地面与非地面点,因此通过有效应用时序数据中凋落期提取的基准dem来对整个生长期数据进行地表高程归一化,考虑到草地区域地形一般较为平坦且地物尺寸较小,一般设置较小的地物搜索尺寸、地形坡度以及更精细的迭代角度和距离获取地面点信息。在利用基准dem对时序数据进行高程归一化时,为了最大程度保留植被冠层中具有不同高度植株的点云信息,基准dem的生成采用不规则三角网插值生成以保证地面区域的高分辨率和连续性,高程归一化通过直接基于点云减去对应dem像元值实现,以避免归一化中部分植株高度信息的缺失,获得标准化的点云数据。
[0044]
步骤三:植被垂直结构参数反演,利用反演结果表示植被生长过程变化趋势。
[0045]
参见图1,对草地植被整体生长过程变化趋势的表征通过反演不同生长期植被垂直结构参数实现。其中,区域中植株整体高度特征通过定量描述植被高度参数如平均株高和最大株高变化情况来表征植被生长;草地垂直覆盖度通过构建lidar穿透指数(lidar penetration index,lpi)来表示植被冠层随生长时间的变化趋势;草地体积通过定量计算样方区域中冠层植被点云在三维空间上体积变化来表示冠层生长变化。
[0046]
如图2所示,对于样方区域中草地植株的高度参数反演,在处理后的高程归一化离散点云基础上构建二维栅格单元,将栅格单元作为参数计算基本处理单元进行植株高度的计算。通过统计每个栅格单元中所有点的平均值h
mean
和最大值h
max
来表示当下栅格中植株的高度特征分布,最终将所有栅格的高度特征参数进行综合,计算出当下样方区域中植株的高度特征分布,具体地,对所有栅格的高度特征参数求算术平均来计算出当下样方区域中植株的高度特征分布。在设置二维栅格的基本单元尺寸时,一般将栅格设置为30
×
30cm大小,避免较小栅格时对同株植被进行重复统计。
[0047]
利用lidar进行草地植被垂直覆盖度的反演基于点云数量统计的方法实现。lidar所发射的激光脉冲对冠层的响应不仅是关于冠层高度的函数,也是覆盖度的函数,因此通过利用点云的回波信息计算冠层回波相对于整体回波的比例来构建lpi能够计算垂直覆盖度。在草地植被的lpi构建中,通过对高程归一化的所有回波点云设置经验高度阈值以区分植被与地面点,实现对植被垂直覆盖度的反演,具体计算式如下:
[0048][0049]
其中,aci为所有回波覆盖指数;∑all为当前点云中所有点数量;single
canopy
、first
canopy
、intermediate
canopy
和last
canopy
分别表示植被冠层区域中单次回波点、首次回波点、中间回波点以及末次回波点的数量。在将式2应用于草地植被生长趋势监测时,未对多次脉冲回波进行区分,因此将所有回波点均视为单次回波点,并设置合适的高度经验阈值区分植被与非植被点,由此计算当前时间的植被垂直覆盖度。
[0050]
样方区域草地植被体积的计算利用体积表面差分法实现。首先对样区内点云以体素为基本单元进行规则三维网格划分,统计每个网格内点云的高度特征值作为该网格体元值,并根据高度统计量与网格底面积乘积作为该网格体积,整体体积估算则由所有三维网格体积累加而来:
[0051][0052]
其中,v
all
为当前点云的草地植被体积;vi为第i个三维网格的植被体积;hi为第i个三维网格中植被的高度统计量;n为所建立的三维网格集合中子网格的总数量;s表示所建立的三维网格的底面积,这一参数由网格建立时所设置的网格步长确定。在利用上述方法对逐日的植被垂直结构参数进行反演后,通过三种参数每日数值变化即可定量揭示整个生长季中草地植被的生长变化,并能直观获取植被的生长速率。
[0053]
具体测量实例:
[0054]
通过在某一草地区域以距地5m高度架设一台具有固定观测视场角的lidar,并在不同时段以一定倾斜角对样方区域展开持续观测。观测时间从2021年05月21日开始到2021年09月15日结束,在对获取的数据进行初步处理中,剔除了33天因lidar本身时钟错乱和维护导致的无效数据,最终共进行了88天有效观测。在获取的逐日点云数据中,观测角度因维
护需要有两次变化,分别为倾斜12.5
°
和垂直向下观测,经过角度旋转变化后均统一为相同坐标系。基准dem的生成采用渐进加密三角网滤波算法进行,最大地物尺寸和地形坡度设置分别为1m和1
°
,最小迭代角度和迭代距离分别为1
°
和0.5m,最终提取出凋落期准确地面点,并基于不规则三角网插值方法生成高分辨率基准dem,实现逐日点云高程归一化。草地植被高度特征通过对归一化时序点云数据逐日统计均值和最大值进行,参见图3所示,通过以样方区域内草地植被的最大高度值来表征当下牧草的最好生长水平,平均高度值则表示当下植被的平均生长水平,由此基于本文高度统计方法能够直观刻画草地植被的垂直方向生长变化特征。图3的高度特征变化结果表示了草地植被区域最好的生长水平始终远大于样方中平均水平,但最好生长水平跳动幅度较大,但是整体平均高度变化水平则趋于平稳,且符合草地缓慢生长到快速生长再到最后迅速凋落的一般认知;对垂直覆盖度的估算以归一化时序点云数据集为基础,设定经验高度阈值(5cm)以统计植被点在整体点云数据中所占比例进行,由此可综合表征当下样方区域内草地植被的茂密程度以及逐日草地冠层覆盖变化状况。图4中的覆盖度逐日变化折线则揭示了植被冠层生长时虽然有一定的跳动幅度,但始终保持持续生长以及到后续的逐渐凋落;植被体积估算基于体积表面差分法进行,通过对样区内点云进行三维网格划分,统计每个网格内点云的高度特征值作为该网格体元值,并根据高度统计量与网格底面积乘积作为该网格体积,整体体积估算则由所有三维网格体积累加而来,其中体素网格尺寸在此被设为5cm,网格尺度高度特征参数使用均值进行(图4),由此可从三维结构角度表征草地植被的立体空间分布变化,综合表示植被的冠层分布水平和垂直结构信息,而从图4中所表示的植被体积变化折线图也能看出植被冠层生长整体变化趋势与覆盖度保持一致,表明区域内植被冠层水平分布和垂直生长水平是统一的。综上,从图3和图4所示的样方内草地植被垂直参数变化来看,草地植被经历了初期的缓慢生长到中期的快速生长,最后到平稳凋落的过程,表明该方法能够有效监测草地植被具体生长变化。
[0055]
上述具体实施方式,仅为说明本发明的技术构思和结构特征,目的在于让熟悉此项技术的相关人士能够据以实施,但以上内容并不限制本发明的保护范围,凡是依据本发明的技术特点所作的任何等效变化或修饰,均应落入本发明的保护范围之内。
[0056]
以上结合具体的实施方案对本公开内容进行了描述,但本领域技术人员应该清楚,这些描述都是示例性的,并不是对本公开内容的保护范围的限制。本领域技术人员可以根据本公开内容的精神和原理对本公开内容做出各种变型和修改,这些变型和修改也在本公开内容的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1