一种含均布陀螺桁架结构的实验装置
1.本发明具体涉及一种含均布陀螺桁架结构的实验装置,属振动控制领域。
背景技术:
2.实际工程应用中,空间可展桁架结构因其折叠比大、质量轻和刚度高等优点,近年来的应用越来越广泛,而这些大型柔性可折展桁架结构的振动问题也一直是动力学方面的难题,在柔性结构上分布处理器和执行器是常用减振方法之一。飞轮拥有定轴性、进动性和陀螺动力效应等独特的力学特性,且其不消耗燃料,并能提供连续的控制力矩,故被选为常用的结构振动稳定装置的执行机构。但在空间结构中加入飞轮之后会使得整个系统的动力学问题变得更为复杂。pmma为亚克力或有机玻璃材料的英文缩写,是本次实验与仿真部分的桁架使用材料。
3.因此,明确含陀螺装置桁架结构的动力学特性,对其模态进行探究是十分有必要的。
技术实现要素:
4.本发明的目的在于提出一种测量含均布转子桁架结构涡动现象的实验装置,此装置能够测量桁架的固有频率及位移轨迹,实现对桁架结构涡动现象的深入探究。目前航天器所采用的执行机构有喷气推力器,磁力矩器和飞轮等角动量交换装置。其中喷气推力器广泛应用于航天器的轨道与姿态控制中,具有较好的控制效果,但缺点是航天器所携带用于喷气推力器消耗的燃料有限,过度消耗燃料会影响航天器的在轨寿命,且推力器会产生喷气羽流,对航天器上携带的精密仪器产生影响。而磁力矩器则是通过和地球磁场相互作用产生力矩,不需消耗燃料便可以对航天器进行姿态轨道控制,但缺点是产生的控制力矩过小,在地球磁场微弱的高轨上,难以满足多数航天器的控制需求。飞轮通过动量交换的方式实现对航天器振动以及姿态控制,其控制稳定性高,机动灵活,且不需要消耗燃料,使得航天器发射成本大幅度降低,延长了使用寿命。
5.但飞轮等角动量交换装置的加入,会影响到桁架等柔性结构的固有特性。前人文献中提到角动量的加入会对梁结构产生以下影响:原先相等的特征值会随着角动量的增大出现分叉现象,且各阶特征值曲线的变化趋势也不相同;原先解耦的各阶振型随着角动量的加入出现耦合现象,使得梁结构发生涡动,而且不同阶的振型分为前涡动和后涡动两种运动形式。但以上分析均基于理论推导,缺少实验的验证。本发明的目的是填补这一研究领域的空白,通过实验的方式验证理论的正确性,以更加具象的形式说明柔性结构的涡动。
6.本发明采用以下技术方案:
7.一种含均布陀螺桁架结构的实验装置,包括一号连接件(1)、一号杆(5)、转子(8)、无刷电机(9)、电机连接板(10)、桁架固定板(11);一号连接件(1)和二号连接件(2)均与一号杆(5)、二号杆(6)、三号杆(7)通过过盈配合拼装成陀螺桁架结构自由端的端面;一号连接件(1)和二号连接件(2)为四接口节点,一号杆(5)为斜向杆,二号杆(6)为水平杆,三号杆
(7)为竖直杆;一号连接件(1)和二号连接件(2)的四接口节点分别连接,所述三号连接件(3)和四号连接件(4)与一号杆(5)、二号杆(6)、三号杆(7)通过过盈配合多次拼装成陀螺桁架单胞,各陀螺桁架单胞以模数形式组成桁架主体结构。电机连接板(10)结构本身带有四个通孔,与桁架单胞固定连接。无刷电机(9)通过螺栓与电机连接板(10)连接在一起,转子(8)和无刷电机(9)通过螺栓连接在一起。桁架固定板(11)与桁架主体结构通过过盈配合固定连接。无刷电机(9)为桁架结构增加角动量。
8.根据陀螺进动原理,当均布陀螺桁架结构以角速度ω绕其对称轴高速自转时,若同时以角速度ω进动,而陀螺力矩为mg=m0=jzω
×
ω。式中jz是陀螺对自转轴z的转动惯量,陀螺力矩会使得均布陀螺桁架结构的模态发生改变,因而均布陀螺桁架结构模态出现涡动现象。
9.通过激振器施加激励在最底部的陀螺桁架单胞的一面,测点分别为陀螺桁架中第六个陀螺桁架单胞顶部连接件和顶端单胞顶部连接件。将均布陀螺桁架结构竖立放置于平面,以消除均布陀螺桁架结构自重对实验结果的影响,并将均布陀螺桁架结构底部地面使用螺栓固定。对均布陀螺桁架结构做施加简谐激励,并将所采集的加速度信号进行傅里叶计算展开;为了验证由于角动量的加入桁架结构出现涡动的现象,增加直线桁架固定点的运动轨迹实验,以激振器激振法进行桁架固定点的运动轨迹实验,在固定方向施加单方向激励。
10.随着深空探测等工程越发受到重视,可展开桁架的使用率也越来越高,而这种结构在其折展和工作的过程中不可避免的存在振动问题,而振动的根本为同频共振,在可展开桁架结构中加入转子,使得其变为陀螺柔性体。当转子的转速不同时,结构与转子耦合形成的陀螺力矩会改变结构本身的性质,即结构的固有频率发生变化,出现频率分岔的现象,此时该结构的固有频率变分为高频与低频,这样变可选择合适的转速匹配对应的频率,从而降低结构的振动。另一方便结构的振动与转子角动量耦合产的的陀螺力矩本身就是一种抵抗力,在一定程度上降低桁架结构的振动幅值。通过均布陀螺桁架结构抑制桁架的振动属于是被动控制,相比pid等控制方式,其优点是反应迅速、成本较低且作用的效果快。
附图说明
11.构成本发明的一部分的附图用来提供对本发明的进一步理解,本发明的示意实例及其说明用于解释本发明,并不构成对本发明的不当限定。附图中:
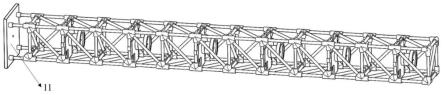
12.图1为本发明所述的均布陀螺桁架结构的实验装置的总体示意图;
13.图2为本发明所述的桁架结构带有转子的单胞示意图;
14.图3为本发明所述的转子系统示意图;
15.图4为本发明所述的四种连接件示意图;
16.图5为信号分析系统结构图。
17.图中标记为:1-一号连接件,2-二号连接件,3-三号连接件,4-四号连接件,5-一号杆,6-二号杆,7-三号杆,8-转子,9-无刷电机,10-电机连接板,11-桁架固定板。
具体实施方式
18.下面结合附图对本发明的技术方案进行进一步描述:
19.如图1至4所示,本发明所述的一种均布陀螺桁架结构的实验装置,主要包括一号连接件(1)、一号杆(5)、转子(8)、无刷电机(9)、电机连接板(10)、桁架固定板(11);一号连接件(1)和二号连接件(2)均与一号杆(5)、二号杆(6)、三号杆(7)通过过盈配合拼装成桁架结构自由端的端面;一号连接件(1)和二号连接件(2)为四接口节点,一号杆(5)为斜向杆,二号杆(6)为水平杆,三号杆(7)为竖直杆;一号连接件(1)和二号连接件(2)的四接口节点分别连接,所述三号连接件(3)和四号连接件(4)与一号杆(5)、二号杆(6)、三号杆(7)通过过盈配合多次拼装成桁架的单胞,并以相同的结构组成整个桁架主体结构。电机连接板(10)结构本身带有四个通孔,与桁架单胞固定连接。无刷电机(9)通过螺栓与电机连接板(10)连接在一起,转子(8)和无刷电机(9)通过螺栓连接在一起。桁架固定板(11)与桁架主体结构通过过盈配合固定连接。结构整体是长、宽、高为100mm
×
100mm
×
1100mm的长方体。并在后续实验过程中通过电池与电调给无刷电机供能,为桁架结构增加角动量。
20.根据陀螺进动原理,当陀螺以角速度ω绕其对称轴高速自转时,若同时以角速度ω进动,而陀螺力矩mg=m0=jzω
×
ω。式中jz是陀螺对自转轴z的转动惯量。最终陀螺力矩会使得桁架结构的模态发生改变,因而桁架模态出现涡动现象。
21.本次实验过程通过激振器施加激励在桁架最底部的单胞的一面,测点分别为桁架中第六个单胞顶部连接件和顶端单胞顶部连接件。将桁架主体结构竖立放置于平面,以消除桁架自重对实验结果的影响,并将其底部地面使用螺栓固定。对桁架做施加简谐激励,并将所采集的加速度信号进行傅里叶计算展开;为了验证由于角动量的加入桁架结构出现涡动的现象,增加直线桁架固定点的运动轨迹实验,以激振器激振法进行桁架固定点的运动轨迹实验,在固定方向施加单方向激励。
22.实施例
23.一种测量含均布转子桁架结构涡动现象的实验装置,主要包括外转子无刷电机、pmma电机连接十字板与保护壳、钢转子和pmma制桁架。
24.本专利所描述的桁架结构为一种直线型可展开桁架结构,该结构的横杆、竖杆、斜杆均为圆杆,材料为pmma;直线桁架的连接件为pvc;外转子无刷电机通过一个pmma的十字型方板与桁架连接,并在外部加一层保护外壳防止转子脱落;外转子无刷电机通过电机连接板与桁架固定;根据外转子无刷电机最大功率选取转子为结构钢材质。
25.首先搭建本发明所述直线桁架结构,选取直径为6mm的pmma实心圆杆作为直线桁架结构的横杆、竖杆、斜杆,长度分别为70mm、70mm、93mm。连接件为长和高为20mm,宽30mm,壁厚2mm。四种不同的连接件分别与杆件依靠过盈配合连接,并在搭建结束后使用树脂胶二次固定。
26.本发明所述陀螺转子系统包括无刷电机、转子,所述转子和无刷电机通过螺栓连接,质量块和无刷电机经过高精度动平衡处理后组成转子系统;电机连接板与电机保护壳使用树脂胶绑定,并通过电机连接板上的孔洞与桁架的横杆、竖杆过盈配合固定。
27.进一步地,本发明所述转子与无刷电机通过转子上的通孔,无刷电机顶部的螺纹孔,使用m2螺钉连接。
28.所述陀螺转子系统还包括信号分析系统,信号分析系统包括:信号接收器、信号放大器、激振器、桁架主体结构、电脑、信号接收器、传感器、信号分析软件。首先由信号发生器选择并设置合适的信号,通过信号放大器将电信号放大至适配激振器与实验环境的电信
号,通过激振器顶部的螺纹孔与可展开桁架结构连接,给予桁架主体结构相对应的激励。传感器通过热熔胶与桁架主体结构相连。采集各类信号,如加速度大小、力的大小、速度大小等信号。信号接收器通过传感器采集信号,并将信号发送至电脑端,使用电脑内部的分析软件,经过傅里叶变换等信号处理方法,将所采集到的信号处理到所需数据,便可对实验中的桁架主体结构进行分析以及后续结构优化等。
29.模态分析的主要流程为:激振器给予桁架主体结构预定激励,通过数据采集系统测得桁架主体结构的响应与时间里程,对所得响应数据处理后确定系统的物理参数。
30.以上所述仅为本发明的一种实施方式,本发明的保护范围并不以上述实施方式为限,但可认为在这里揭示原理的各种方式仍在权利要求的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1