一种自动识别工程机械工作状态的装置及其方法与流程
1.本发明涉及车辆识别技术领域,具体涉及一种自动识别工程机械工作状态的装置及其方法。
背景技术:
2.水泥罐车又称散装水泥车,粉罐车,罐车,粉粒物料运输车,由专用汽车底盘、散装水泥车罐体、气管路系统、自动卸货装置等部分组成。适用于粉煤灰、水泥、石灰粉、矿石粉、颗粒碱等颗粒直径不大于0.1mm粉粒干燥物料的散装运输。
3.目前使用最多的就是正反转传感器,它是通过霍尔原理检测的,需要在轴、轮上固定两片相对应的磁铁。采用这种方式必须接电到驾驶室,布线,还得要求专业人员去现场支持安装,对于我们就花费大量的精力在安装,对客户很不友好。
技术实现要素:
4.为解决上述技术问题,本发明提供一种自动识别工程机械工作状态的装置,包括底座,所述底座上端固定连接盒体,所述盒体的开口处设置有盒盖,所述盒体内部设置有姿态检测仪,所述姿态检测仪包括陀螺仪传感器。
5.优选的:所述陀螺仪传感器为mems陀螺仪传感器,可以识别旋转方向,在顺时针旋转是输出的正值,在逆时针旋转时是负值。
6.优选的:所述陀螺仪传感器两端固定连接主轴,主轴两端转动连接内环。
7.优选的:所述内环通过内环轴转动连接外环,外环远离内环轴的外壁固定连接外环轴。
8.优选的:所述外环轴转动连接套管,套管固定连接盒体内壁。
9.一种自动识别工程机械工作状态的方法,其操作步骤如下:
10.s1、将内置陀螺仪传感器的盒体安装于罐体表面;
11.s2、姿态检测仪在罐体旋转时,采集陀螺仪传感器大量数据;
12.s3、对数据进行分析处理,确定其绕的哪个轴旋转。
13.优选的:所述步骤s2中盒体水平安装在罐体的侧面,此时姿态检测仪的长平行于地面,当罐体旋转时,y轴数据会有正负数据,而x轴和z轴为0。
14.优选的:所述步骤s2中盒体垂直安装在罐体的侧面,此时姿态检测仪的长垂直于地面,当罐体旋转时,x轴数据会有正负数据,而y轴和z轴为0。
15.优选的:所述步骤s2中盒体既不是水平安装也不是垂直安装在侧面,当罐体旋转时,x、y轴都有可能在变化,采集到的陀螺仪数据是x、y轴符号是一致的,基于正负值判断其正反转。
16.优选的:所述步骤s2中盒体安装于端面,无论是水平还是垂直,当罐体旋转时,z轴数据会有正负数据,而y轴和x轴为0。
17.本发明的技术效果和优点:
18.mems陀螺仪传感器,可以识别旋转方向,在顺时针旋转是输出是正值,在逆时针旋转时是负值,我们只要把姿态检测仪(长方体盒子,内置mems陀螺仪)贴在罐体的任何位置,我们都用检测出罐体的旋转方向。这样方便我们的交付工作,客户也能够轻易安装。
附图说明
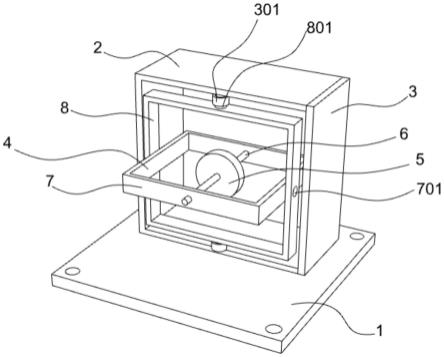
19.图1是本申请实施例提供的自动识别工程机械工作状态的装置的结构示意图;
20.图2是本申请实施例提供的自动识别工程机械工作状态的装置的内部结构示意图。
21.图中:1、底座;2、盒体;3、盒盖;301、套管;4、姿态检测仪;5、陀螺仪传感器;6、主轴;7、内环;701、内环轴;;8、外环;801、外环轴。
具体实施方式
22.下面结合附图和具体实施方式对本发明作进一步详细的说明。本发明的实施例是为了示例和描述起见而给出的,而并不是无遗漏的或者将本发明限于所公开的形式。很多修改和变化对于本领域的普通技术人员而言是显而易见的。选择和描述实施例是为了更好说明本发明的原理和实际应用,并且使本领域的普通技术人员能够理解本发明从而设计适于特定用途的带有各种修改的各种实施例。
23.实施例1
24.请参阅图1,在本实施例中提供一种自动识别工程机械工作状态的装置,包括底座1,底座1上端固定连接盒体2,盒体2的开口处设置有盒盖3,盒体2内部设置有姿态检测仪4,姿态检测仪4包括陀螺仪传感器5,陀螺仪传感器5为mems陀螺仪传感器,可以识别旋转方向,在顺时针旋转是输出的正值,在逆时针旋转时是负值,陀螺仪传感器5两端固定连接主轴6,主轴6两端转动连接内环7,内环7通过内环轴701转动连接外环8,外环8远离内环轴701的外壁固定连接外环轴801,外环轴801转动连接套管301,套管301固定连接盒体2内壁。
25.对于混凝土罐体有三个面,包括侧面、底面和端面,端面为靠近驾驶室的一面。
26.本装置水平安装在罐体的侧面,此时姿态检测仪的长平行于地面,当罐体旋转时,y轴数据会有正负数据,而x轴和z轴为0;
27.本装置垂直安装在罐体的侧面,此时姿态检测仪的长垂直于地面,当罐体旋转时,x轴数据会有正负数据,而y轴和z轴为0;
28.既不是水平安装也不是垂直安装在侧面,当罐体旋转时,x、y轴都有可能在变化,采集到的陀螺仪数据是x、y轴符号是一致的,基于正负值判断其正反转;
29.安装于端面,无论是水平还是垂直,当罐体旋转时,z轴数据会有正负数据,而y轴和x轴为0。
30.所谓的自动识别,就是姿态检测仪在机器工作后,采集陀螺仪大量数据,对这些数据进行分析处理,确定其绕的哪个轴旋转。
31.实施例2
32.请参阅图2,在本实施例中,提供一种自动识别工程机械工作状态的方法,包括陀螺仪传感器,陀螺仪传感器是基于自动空间进行移动的控制系统,有三个x、y、z轴,其轴向的方向是固定的,+x轴水平地面向右,+y轴水平地面向上,+z轴垂直地面向上,-x、-y、-z则
相反,不改变其方向,每个轴都会输出正负角速度值,基于这三个输出值进行自动识别其旋转方向,在静止时,三轴的角速度都会输出为0,通过姿态检测仪自动识别,采集陀螺仪大量数据,并对这些数据进行分析处理,确定陀螺仪绕哪个轴旋转,进而识别罐体的旋转方向。
33.本发明的工作原理是:
34.采用mems陀螺仪传感器来检测的技术孕育而出,对于mems陀螺仪传感器,可以识别旋转方向,在顺时针旋转是输出是正值,在逆时针旋转时是负值。对于安装,我们只要把姿态检测仪(长方体盒子,内置mems陀螺仪)贴在罐体的任何位置,我们都用检测出罐体的旋转方向。这样方便我们的交付工作,客户也能够轻易安装。
35.显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域及相关领域的普通技术人员在没有作出创造性劳动的前提下所获得的所有其他实施例,都应属于本发明保护的范围。本发明中未具体描述和解释说明的结构、装置以及操作方法,如无特别说明和限定,均按照本领域的常规手段进行实施。
技术特征:
1.一种自动识别工程机械工作状态的装置,包括底座(1),其特征在于,所述底座(1)上端固定连接盒体(2),所述盒体(2)的开口处设置有盒盖(3),所述盒体(2)内部设置有姿态检测仪(4),所述姿态检测仪(4)包括陀螺仪传感器(5)。2.根据权利要求1所述的一种自动识别工程机械工作状态的装置,其特征在于,所述陀螺仪传感器(5)为mems陀螺仪传感器,可以识别旋转方向,在顺时针旋转是输出的正值,在逆时针旋转时是负值。3.根据权利要求2所述的一种自动识别工程机械工作状态的装置,其特征在于,所述陀螺仪传感器(5)两端固定连接主轴(6),主轴(6)两端转动连接内环(7)。4.根据权利要求3所述的一种自动识别工程机械工作状态的装置,其特征在于,所述内环(7)通过内环轴(701)转动连接外环(8),外环(8)远离内环轴(701)的外壁固定连接外环轴(801)。5.根据权利要求4所述的一种自动识别工程机械工作状态的装置及其方法,其特征在于,所述外环轴(801)转动连接套管(301),套管(301)固定连接盒体(2)内壁。6.一种自动识别工程机械工作状态的方法,其操作步骤如下:s1、将内置陀螺仪传感器的盒体安装于罐体表面;s2、姿态检测仪在罐体旋转时,采集陀螺仪传感器大量数据;s3、对数据进行分析处理,确定其绕的哪个轴旋转。7.根据权利要求6所述的一种自动识别工程机械工作状态的装置及其方法,其特征在于,所述步骤s2中盒体水平安装在罐体的侧面,此时姿态检测仪的长平行于地面,当罐体旋转时,y轴数据会有正负数据,而x轴和z轴为0。8.根据权利要求6所述的一种自动识别工程机械工作状态的装置及其方法,其特征在于,所述步骤s2中盒体垂直安装在罐体的侧面,此时姿态检测仪的长垂直于地面,当罐体旋转时,x轴数据会有正负数据,而y轴和z轴为0。9.根据权利要求6所述的一种自动识别工程机械工作状态的装置及其方法,其特征在于,所述步骤s2中盒体既不是水平安装也不是垂直安装在侧面,当罐体旋转时,x、y轴都有可能在变化,采集到的陀螺仪数据是x、y轴符号是一致的,基于正负值判断其正反转。10.根据权利要求6所述的一种自动识别工程机械工作状态的装置及其方法,其特征在于,所述步骤s2中盒体安装于端面,无论是水平还是垂直,当罐体旋转时,z轴数据会有正负数据,而y轴和x轴为0。
技术总结
本发明公开了一种自动识别工程机械工作状态的装置及其方法,包括底座,底座上端固定连接盒体,盒体的开口处设置有盒盖,盒体内部设置有姿态检测仪,姿态检测仪包括陀螺仪传感器,所述陀螺仪传感器为MEMS陀螺仪传感器,可以识别旋转方向,在顺时针旋转是输出的正值,在逆时针旋转时是负值,所述陀螺仪传感器两端固定连接主轴,主轴两端转动连接内环,MEMS陀螺仪传感器,可以识别旋转方向,在顺时针旋转是输出是正值,在逆时针旋转时是负值,我们只要把姿态检测仪(长方体盒子,内置MEMS陀螺仪)贴在罐体的任何位置,我们都用检测出罐体的旋转方向。这样方便我们的交付工作,客户也能够轻易安装。轻易安装。轻易安装。
技术研发人员:李梁勋 陈苏飞 任华杰
受保护的技术使用者:湖南黑鲸数据科技有限公司
技术研发日:2022.11.17
技术公布日:2023/3/24
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1