一种激光非接触式物体振动检测及监测方法与流程
本发明涉及物体振动检测,特别是涉及一种激光非接触式物体振动检测及监测方法。
背景技术:
1、目前,非接触式光学测振方式应用广泛,但仍存在许多问题,例如:
2、(一)部分激光非接触式测振方法对测试环境有较高的要求,需要暗室照相方式以获取携带振动信息图像,不便于一般工作环境下物体振动的测量;例如:全息法、散斑法、云纹干涉法。
3、(二)另一部分激光非接触式测振方法由于光源与检测物体工作距离接近几毫米至几十毫米,极大限制了测量装置安装距离,且多光路光学测量装置存在成本高、光路复杂难操作、量程小等问题;例如:离焦法、外差干涉法。
4、(三)传统的激光三角法是测量光束照射在检测物后反射的像光点的位置,根据入射光束经检测物振动反射时引起的像光点在光电探测器感光面上位移而致使光电探测器电信号变化,分析信号的实时变化以得到检测物振动情况。但检测像光点位移须使用光电传感器阵列,该方式成本高,且对光学探头灵敏度的一致性要求也极高,使用场景苛刻。
技术实现思路
1、为解决上述问题,本发明提供了一种激光非接触式物体振动检测及监测方法,基于传统激光三角法测量,利用光栅衍射和单个点阵面光电传感器来获取振动像光点的位移信息,根据三角函数关系建立数学模型以推导出振幅与振动像光点位移等信息的关系,从而得到检测物振动信息,对物体振动进行检测及监测。具体的,本发明的目的是这样实现的:
2、一种激光非接触式物体振动检测及监测方法,包括以下步骤:
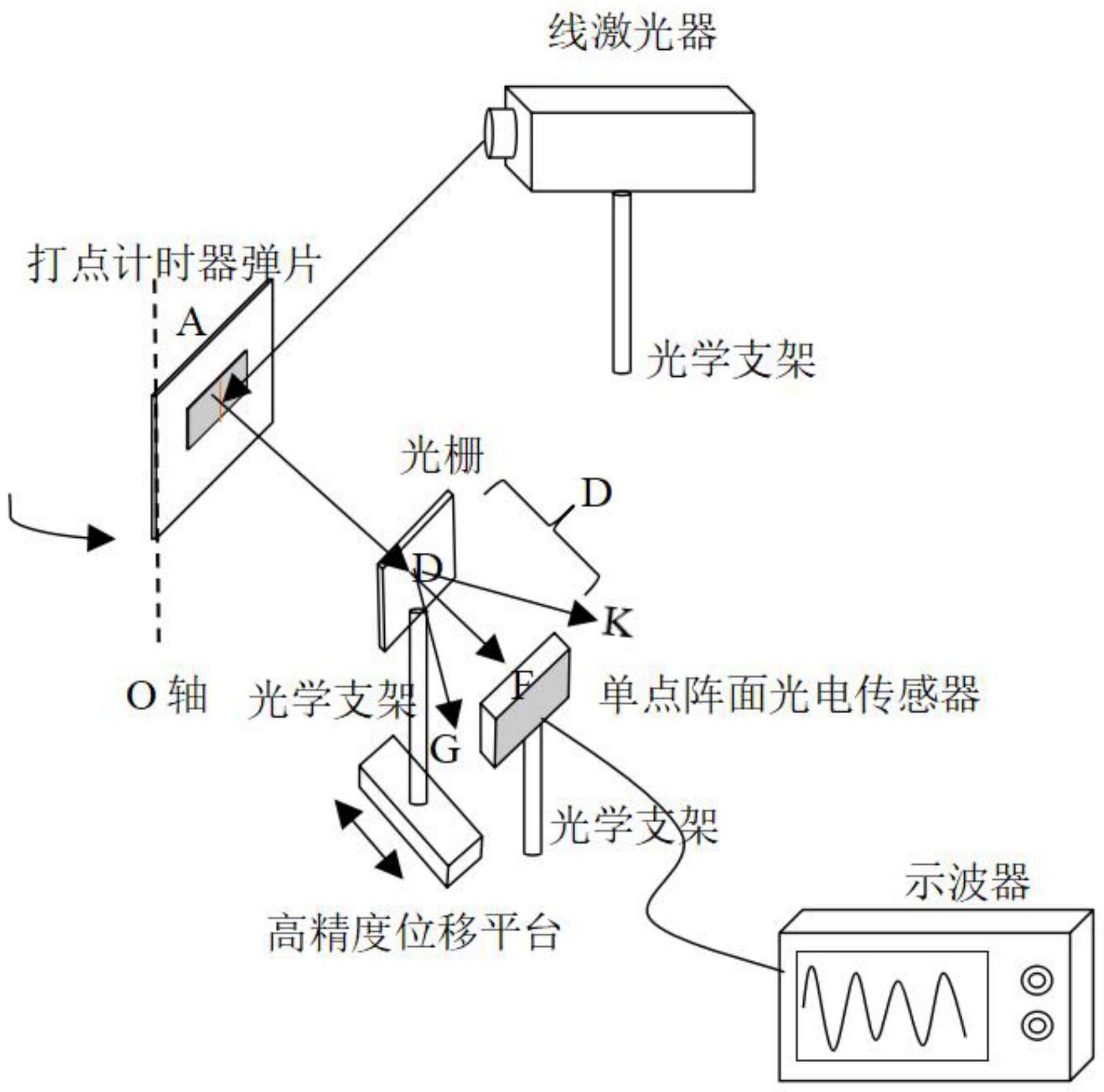
3、s1,布置光路,将线激光器、光栅、单点阵面光电传感器和检测物布置于同一平面上,使线激光器出射光照射在检测物表面后所产生的反射光经过光栅到达单点阵面光电探测器;调整各部件角度使检测物静止状态下所反射的反射光穿过光栅后产生的第零级衍射条纹垂直进入单点阵面光电传感器;
4、s2,数据采集,将单点阵面光电传感器信号接入示波器,采集检测物静止时反射光穿过光栅产生的第零级衍射条纹与第一级衍射条纹照射在单点阵面光电传感器平面上的距离x;检测物绕固定点o振动,检测物静止时反射光点为a,测量ao间的距离为h;检测物静止时反射光穿过光栅产生的第零级衍射条纹到单点阵面光电传感器的接收点为f,测量点a到点f的距离为l;然后振动检测物,调整光栅与单点阵面光电传感器之间的距离,直至检测物振动时反射光穿过光栅后产生的第一级衍射条纹刚好进入单点阵面光电传感器;记录此刻光栅与单点阵面光电传感器之间的距离d;
5、s3,振动计算,包括振动角度计算和振动频率计算,通过所采集的数据d、h、l、x计算出检测物振动时相对于静止状态产生的振动角度;通过振动状态下检测物反射光穿过光栅后的第一级衍射条纹摆入或摆出单点阵面光电传感器时接收到的实时信号得到检测物振动频率。
6、进一步地,所述步骤s1中检测物静止状态下,通过调整线激光器、光栅、单点阵面光电传感器和检测物间的角度差以保证光路中入射光束与经检测物反射光束间夹角成90°;所述步骤s3中所述振动角度计算分为以下步骤,
7、s3.1,计算衍射角,已知入射激光波长λ和光栅栅距d,通过衍射公式dsinθ=λ计算出检测物静止时反射光线穿过光栅产生的第一级衍射条纹和第零级衍射条纹之间的衍射角θ;
8、s3.2,所述距离x和距离d与衍射角θ之间的三角函数关系为x=dtanθ;
9、s3.3,检测物振动时相对于静止状态产生的振动角度记为α,根据三角函数三角关系利用如下公式计算得出振动角度α:
10、
11、进一步地,所述步骤s3中所述振动频率的计算为根据示波器测振信号周期波形的时间间隔t,由振动频率f=1/t即可得到检测物振动频率。
12、进一步地,将所述光栅置于高精度位移平台之上;在检测物表面设置镜面反射配件,增强入射光的反射。
13、进一步地,步骤s2中当检测物振动,但还没有调整光栅与单点阵面光电传感器之间的距离时,仅有第零级衍射条纹在单点阵面光电传感器上晃动,因此示波器波形中仅有对应检测物振动时反射光穿过光栅产生的第零级衍射条纹摆入摆出的周期特征峰u0;当调整光栅直至检测物振动时反射光穿过光栅后产生的的第一级衍射条纹刚好进入单点阵面光电传感器,示波器中除第零级衍射条纹对应特征峰u0,同时出现第一级衍射条纹对应信号特征峰v0;通过单点阵面光电传感器接收光电信号在示波器上显示的特征峰v0判断检测物反射光穿过光栅后产生的第一级衍射条纹是否刚好进入单点阵面光电传感器;之后通过观察u0和v0判断检测物是否处于非正常振动状态。
14、进一步地,所述非正常振动状态包括检测物振动幅度非正常和检测物振动频率非正常。
15、进一步地,将检测物正常振动时特征峰v0峰值大小p为标准,当p变化值δp≥0.1p或δp≤-0.1p或p=0时,检测物处于振动幅度非正常状态。
16、进一步地,两个特征峰u0间隔时间为t,当t变化值δt≥0.01t或δt≤-0.01t时,检测物处于振动频率非正常状态。
17、本发明工作原理如下:
18、该方案仅考虑光栅的零级与一级衍射条纹。如图3所示,检测物静止状态,线激光器出射光束即入射光经振动源上a处后反射,反射光射入光栅d处而后产生衍射,其中df为检测物静止时第零级衍射条纹光束、dk与dg为检测物静止时第一级衍射条纹光束,第零级衍射条纹光束df直射进入单点阵面光电传感器,单点阵面光电传感器与示波器相接。
19、如图4所示,检测物振动状态,检测物此时相对于静止状态发生∠aob=α角度变化。注意此前检测物静止状态下的光路用虚线进行表示,静止状态下测量光路要求入射光束与出射光束间夹角为90°,通过摆放静止状态检测物入射光束与反射光束成90°,便于通过建立三角相似关系求解物体振幅相关∠aob=α角度变化。激光器出射光束经检测物b处反射,反射光后经光栅e处产生衍射,其中eg为检测物振动状态下第零级衍射条纹光束,ej与ef为检测物振动状态下第一级衍射条纹光束,静止状态反射光与振动状态反射光之间的交点为c。
20、入射光穿过光栅后衍射的第零级、第一级衍射条纹间具有固定的衍射角θ,根据衍射公式dsinθ=λ可以求出衍射角θ,其中λ为入射激光的波长,d为光栅的栅距。∠gdf、∠kdf均为检测物静止状态第零级衍射条纹与第一级衍射条纹之间的衍射角,∠feg、∠jeg均为检测物振动状态第零级衍射条纹与第一级衍射条纹之间的衍射角,由衍射公式dsinθ=λ可知如上四个衍射角数值均为θ,θ=∠gdf=∠kdf=∠feg=∠jeg。
21、检测物静止状态第零级衍射条纹dk与第一级衍射条纹df在单点阵面光电传感器平面上的距离x可通过单点阵面光电传感器与光栅间距离df=d和第零级衍射条纹与第一级衍射条纹衍射角θ用公式x=dtanθ进行求解。通过调节光栅与单点阵面光电传感器间的距离df=d大小,可改变静止状态第零级衍射条纹df与第一级衍射条纹光束dk在单点阵面光电传感器平面上距离x的大小。此时调节光栅与单点阵面光电传感器间的距离为合适值后,检测物振动状态下第一级衍射条纹光束ef刚好进入单点阵面光电传感器,即原先静止状态第零级衍射条纹df入射单点阵面光电传感器的位置。而振动状态下第一级衍射条纹ef相对于静止状态第一级衍射条纹光束dk发生向左偏移,在单点阵面光电传感器平面上的偏移量用fk进行表示。此刻光栅与单点阵面光电传感器距离df=d为合适值时,单点阵面光电传感器平面上,检测物静止状态下第一级衍射条纹dk与第零级衍射条纹df间距离x等于振动状态第一级衍射条纹ef相对于静止状态第一级衍射条纹光束dk发生的偏移量fk。因此当光栅与单点阵面光电传感器间距离df=d为合适值时所得到检测物静止状态第零级衍射条纹df与第一级衍射条纹dk在单点阵面光电传感器平面上的距离x能够等效替代检测物振动状态下反射光束第一级衍射条纹ef相对于其静止状态反射光束第一级衍射条纹dk在单点阵面光电传感器表面发生的位移fk,即x=dtanθ=dtan∠kdf=fk。通过如上方式所得检测物振动反射像光电点在单点阵面光电传感器平面上的位移,与检测物振动时相对于静止状态发生∠aob=α角度变化有关。根据激光三角法可求解得到检测物振动状态相对于静止状态发生的角度变化。
22、至此,测量静止状态下检测物反射光点与单点阵面光电传感器间的距离af=l,物体绕o点振动,振源反射光点与o点间的距离ao=h。测量振动状态下,第一级衍射条纹光束ef刚好进入单点阵面光电传感器,光探头与光栅间的距离df=d。
23、物体振幅通过∠boa=α角度变化进行表示,根据如上测量的距离af=l,ao=h,df=d以及光栅栅距及激光器波长得到的第一级衍射条纹与第零级衍射条纹间的衍射角θ,由图4中的三角函数、三角相似关系,得到如下振动相关角度∠boa=α的关系式,求解即可得到检测物周期振动的角度α:
24、
25、通过振源反射后的像光源摆入或摆出光探头传感器接收实时信号得到检测物振动频率f,根据示波器测振信号周期波形的时间间隔t,由f=1/t即可得到检测物振动频率。
26、判断第一级衍射条纹光束ef刚好进入单点阵面光电传感器的方式:
27、如图5、图6所示,单点阵面传感器接收光电信号显示在示波器上能够分辨出第一级衍射条纹光束是否刚好进入单点阵面光电传感器。检测物振动时,当光栅与单点阵面光电传感器间的距离df=d未调至适当值时,此时仅有第零级衍射条纹在单点阵面光电传感器上晃动,因此示波器波形中仅有对应第零级衍射条纹摆入摆出的周期特征峰u0;检测物振动时,当光栅与单点阵面光电传感器间的距离df=d调至适当值时,此时除第零级衍射条纹在单点阵面光电传感器上晃动,第一级衍射条纹也刚好摆入单点阵面光电传感器,因此示波器波形中不仅有对应第零级衍射条纹摆入摆出的周期特征峰u0,同时会出现对应第一级衍射条纹刚好摆入摆出的周期特征峰v0,由于第零级衍射条纹光强比第一级衍射条纹光强要强,因此从波形特征峰值能够看出u0>v0。因此通过调节光栅与单点阵面光电传感器间的距离df=d,当示波器中出现第一级衍射条纹摆入摆出对应特征峰v0时,此时即为第一级衍射条纹光束ef刚好进入单点阵面光电传感器的时刻,也表明此时光栅与单点阵面光电传感器的距离调整至合适位置。
28、本发明有益效果如下:
29、(一)引入光栅进行测量,根据检测物静止状态下反射光穿过光栅后形成的第零级与第一级衍射条纹照射在单点阵面光电传感器上光点间距离来等效替代激光三角法测量中像光点在传感器阵列上的位移,转而使用单点面阵光电传感器,解决了三角法使用线阵光电传感器测量时导致成本过高的问题和使用场景苛刻的问题。
30、(二)线光源测量,使光路简单易调节,可在多种环境中使用。装置具有工作距离大、分辨力高、可测振动位移范围大以及可测频率范围宽的特点。
31、(三)通过高精度位移平台来调整光栅与光电探测器间的距离,保证等效替代像光点位移的准确性。
- 还没有人留言评论。精彩留言会获得点赞!