一种双机器人自动测量打磨系统中的坐标转换方法及系统与流程
本发明属于机器人打磨测量,更具体地,涉及一种双机器人自动测量打磨系统中的坐标转换方法及系统。
背景技术:
1、风洞、船舶、高铁、风电叶片等大型复杂构件,其尺寸大、难以移动、待加工型面可达性差、加工要求高,然而现阶段主要采用人工加工方式对其表面进行加工处理,存在着劳动强度大、效率低、加工质量不稳定、作业环境差等问题。因此,需要采用三维测量技术和机器人自动化打磨已成为当前产业实现升级换代的理想解决方案。三维测量技术具有检测速度快、柔性好、量程大等优点,通过三维测量技术测量出的数据轮廓与标准模型轮廓进行数模对比,识别出缺陷区域,生成缺陷区域合适的打磨路径和打磨参数,自动化打磨工件,实现大型构件的快速在线测量、打磨路径规划和精确加工一体化的机器人智能化打磨加工,提高打磨质量和效率,保证工件表面加工质量一致性。
2、为了提高工件在进行自动化加工时的余量分析和打磨的精度和效率,急需一种快速且高精度的坐标转换方法,实现从自动化测量系统获取的工件测量坐标系到自动打磨系统坐标系的转换。
技术实现思路
1、针对现有技术的以上缺陷或改进需求,本发明提供一种双机器人自动测量打磨系统中的坐标转换方法及系统,直接通过靶标坐标系建立扫描仪测量坐标系和打磨机器人基座标之间的转换关系,不需要建立测量机器人的手眼标定模型,标定扫描仪测量坐标系和测量机器人基座标之间的转换关系,减少引入测量机器人手眼标定误差,提高了标定精度,简化了标定操作。
2、为实现上述目的,按照本发明的一方面,提供一种双机器人自动测量打磨系统中的坐标转换方法,包括:
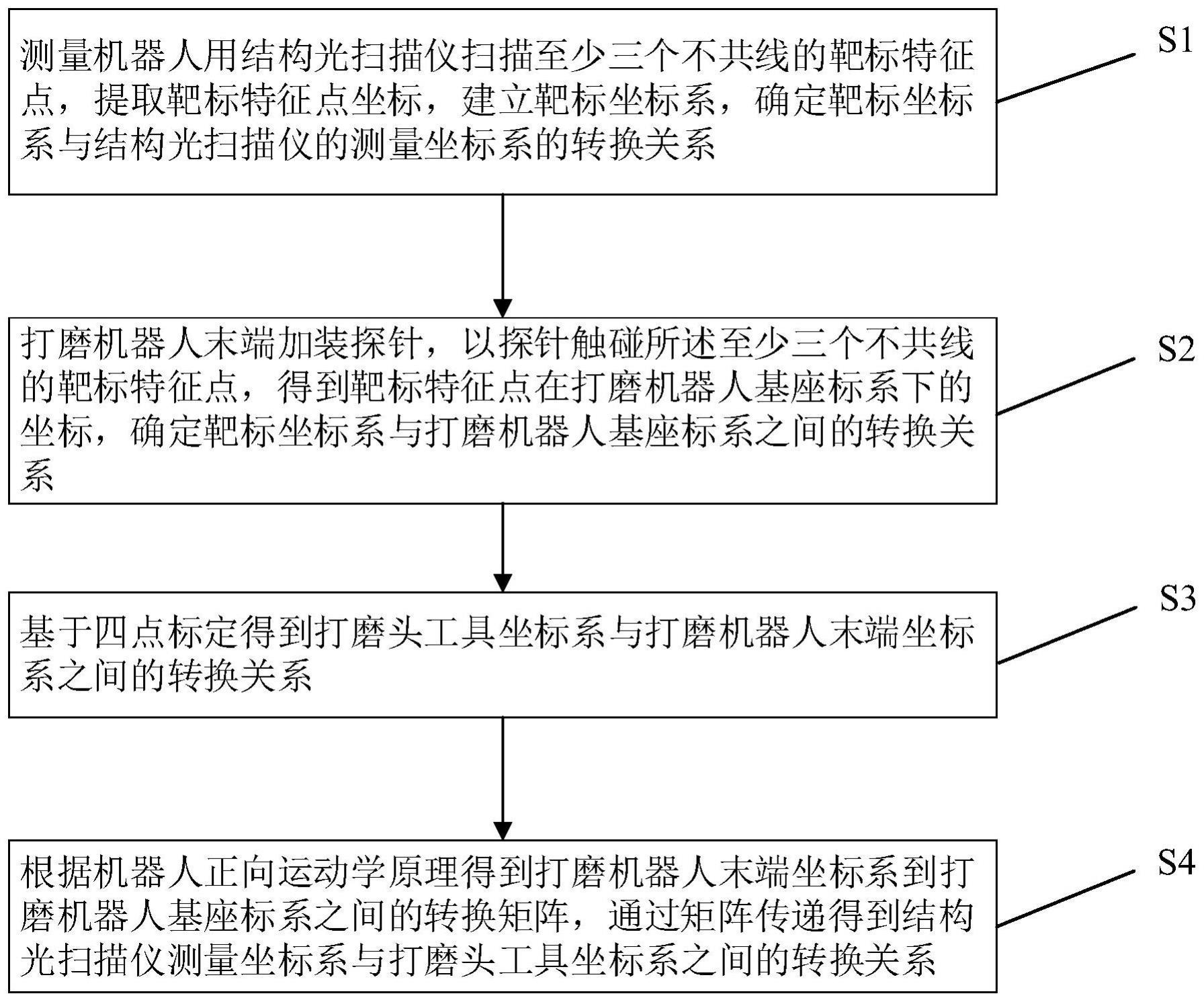
3、测量机器人用结构光扫描仪扫描至少三个不共线的靶标特征点,提取靶标特征点坐标,建立靶标坐标系,确定靶标坐标系与结构光扫描仪的测量坐标系的转换关系;
4、打磨机器人末端加装探针,以探针触碰所述至少三个不共线的靶标特征点,得到靶标特征点在打磨机器人基座标系下的坐标,确定靶标坐标系与打磨机器人基座标系之间的转换关系;
5、基于四点标定得到打磨头工具坐标系与打磨机器人末端坐标系之间的转换关系;
6、根据机器人正向运动学原理得到打磨机器人末端坐标系到打磨机器人基座标系之间的转换矩阵,通过矩阵传递得到面结构光扫描仪测量坐标系与打磨头工具坐标系之间的转换关系。
7、进一步地,所述提取靶标特征点坐标,建立靶标坐标系,包括:
8、任选一点a为靶标坐标系原点,以原点到其余两点中任一点b的方向为x轴,得到x轴单位矢量α;
9、记剩余一点为c,则矢量与矢量交叉乘积,然后归一化得到垂直点a、b、c所在平面的向量,记为y轴单位向量β;
10、记x轴单位矢量α与y轴单位向量β叉乘得到的单位矢量γ为z轴单位矢量,即得到靶标坐标系。
11、进一步地,所述结构光扫描仪可选为面结构光扫描仪、单目线结构光、双目线结构光、单目面结构光扫描仪,双目面结构光扫描仪和多目面结构光扫描仪中的任意一种。
12、进一步地,所述靶标特征点可选为三棱锥、四棱锥、五棱锥、任意棱锥、圆锥、标准球或任一有特征点的靶标的特征点。
13、进一步地,所述确定靶标坐标系与结构光扫描仪的测量坐标系的转换关系,包括:
14、根据测量坐标系下所述至少三个不共线的靶标特征点的坐标,确定所述靶标坐标系相对于结构光扫描仪测量坐标系的旋转矩阵:
15、
16、其中,分别为靶标坐标系相对于结构光扫描仪测量坐标系的x、y、z三个坐标轴方向;
17、根据靶标坐标系原点的坐标,确定测量坐标系原点指向靶标坐标系原点的向量,即为靶标坐标系相对于结构光扫描仪测量坐标系的平移矩阵
18、根据所述旋转矩阵和平移矩阵确定靶标坐标系和测量坐标系之间的转换关系:
19、
20、进一步地,所述靶标坐标系与打磨机器人基座标系之间的转换关系为:
21、
22、其中,为靶标坐标系相对于打磨机器人基座标系的旋转矩阵;为靶标坐标系相对于打磨机器人基座标系的平移矩阵。
23、进一步地,所述基于四点标定得到打磨头工具坐标系与打磨机器人末端坐标系之间的转换关系,包括:
24、打磨机器人夹持打磨头,所述打磨机器人附近放置有一激光位移传感器,调整打磨机器人姿态,得到四个打磨机器人姿态使得打磨头圆形打磨盘中心与激光位移传感器发射的光斑重合且打磨盘中心与激光位移传感器的距离相同,基于四点标定原理得到从打磨头工具坐标系到打磨机器人末端坐标系的转换关系
25、进一步地,所述根据机器人正向运动学原理得到打磨机器人末端坐标系到打磨机器人基座标系之间的转换矩阵,通过矩阵传递得到面结构光扫描仪测量坐标系与打磨头工具坐标系之间的转换关系,包括:
26、根据打磨机器人末端坐标系到打磨机器人基座标系之间的转换矩阵和打磨头工具坐标系到打磨机器人末端坐标系的转换关系得到打磨头工具坐标系到打磨机器人基坐标系的转换关系
27、通过靶标坐标系与结构光扫描仪的测量坐标系的转换关系和靶标坐标系与打磨机器人基座标系之间的转换关系得到结构光扫描仪的测量坐标系与打磨机器人基座标系之间的转换关系
28、根据打磨头工具坐标系到打磨机器人基坐标系的转换关系和结构光扫描仪的测量坐标系与打磨机器人基座标系之间的转换关系得到结构光扫描仪测量坐标系与打磨机器人工具坐标系之间的转换关系
29、进一步地,所述结构光扫描仪测量坐标系与打磨机器人工具坐标系之间的转换关系为:
30、
31、其中,为打磨机器人末端坐标系到打磨机器人基座标系之间的转换矩阵;为打磨头工具坐标系到打磨机器人末端坐标系的转换关系;为靶标坐标系与打磨机器人基座标之间的转换关系;为靶标坐标系和结构光扫描仪测量坐标系之间的转换关系。
32、按照本发明的第二方面,提供一种双机器人自动测量打磨系统中的坐标转换系统,包括:
33、第一主模块,用于测量机器人用结构光扫描仪扫描至少三个不共线的靶标特征点,提取靶标特征点坐标,建立靶标坐标系,确定靶标坐标系与结构光扫描仪的测量坐标系的转换关系;
34、第二主模块,用于打磨机器人末端加装探针,以探针触碰所述至少三个不共线的靶标特征点,得到靶标特征点在打磨机器人基座标系下的坐标,确定靶标坐标系与打磨机器人基座标系之间的转换关系;
35、第三主模块,用于基于四点标定得到打磨头工具坐标系与打磨机器人末端坐标系之间的转换关系;
36、第四主模块,用于根据机器人正向运动学原理得到打磨机器人末端坐标系到打磨机器人基座标系之间的转换矩阵,通过矩阵传递得到面结构光扫描仪测量坐标系与打磨头工具坐标系之间的转换关系。
37、总体而言,通过本发明所构思的以上技术方案与现有技术相比,能够取得下列有益效果:
38、1.本发明的方法,直接通过靶标坐标系建立扫描仪测量坐标系和打磨机器人基座标之间的转换关系,不需要建立测量机器人的手眼标定模型,标定扫描仪测量坐标系和测量机器人基座标之间的转换关系,减少引入测量机器人手眼标定误差,提高了标定精度,简化了标定操作。
39、2.本发明的方法,使用三个灵活且方便加工,简单易用的小靶标构建靶标坐标系,对靶标之间的相对位置关系没有约束,不需要借助高精度复杂的靶标,适合于复杂的工业现场应用。
40、3.本发明的方法,引入了激光位移传感器替代标定针,通过四点标定原理标定工具坐标系,降低了工具坐标系标定难度,提高了标定效率。
41、4.本发明的方法,操作简单,效率高,对于多机器人协同测量打磨系统,任意两台机器人的相对位姿都会经常变化,标定频繁,本发明可以实现快速标定,同时保证标定的准确性和稳定性,从而提高工件在进行自动化加工时的余量分析和打磨的精度和效率。
- 还没有人留言评论。精彩留言会获得点赞!