一种飞机机轮速度精准可靠测量方法与流程
1.本发明属于飞机刹车控制技术领域,尤其涉及一种飞机机轮速度精准可靠测量方法。
背景技术:
2.飞机刹车控制系统作为飞机机载设备中的核心子系统,承担着飞机安全起降的重要作用,其主要功能是实现飞机刹车过程中刹车和防滑的控制。而在刹车和防滑的过程中,控制器需要实时采集所有机轮的速度信号,用于刹车系统的反馈闭环控制。因此,飞机刹车控制系统必须获取精准可靠的机轮速度信号。
3.现有机轮速度测量方法通常由基于fpga的频率计数直接测量,或者基于频率/电压转换电路获取的电压值间接测量。基于fpga的频率计数的方法利用周期法来采集速度信号,但其由fpga,dsp和采集电路构成,采集链路长。而基于频率/电压转换电路的方法,首先将采集的速度频率信号转换为电压信号,再利用dsp的采集模块将电压信号回采,这种速度采集方法由于元器件性能和模拟电路结构问题,采集的信号精度往往较差,需要进行软件的修正。
4.经检索,在公开号为cn106802355a的发明中提出基于现场可编程逻辑阵列+数字信号处理器设计+速度采集电路来避免环境变化产生采集误差,从而提高飞机刹车系统速度采集的精度,但其采集链路长,增大了故障的可能性,且没有多余度设计,可靠性不高。
5.经检索,在公开号为cn106645776b的发明中提出通过在一个采集周期内重复读取双余度轮速信号多次,来避免因干扰和延时导致轮速信号的误取,以保证飞机刹车系统轮速信号采集的精准性,但由于其采集重复次数过多,实时性较弱,虽然采用了双余度轮速采集的设计,但其均是基于采集的方波信号,一旦方波采集模块故障,则两路信号均会丢失。
技术实现要素:
6.本发明的目的是:为解决传统刹车控制系统速度采集过程中的精度较差,抗干扰能力较弱和可靠性不高的问题。本发明提出了一种飞机机轮速度精准可靠测量方法。
7.本发明的技术方案是:
8.一种飞机机轮速度精准可靠测量方法,飞机机轮速度传感器输出的正弦频率信号,所述方法包括:
9.s1,根据速度传感器输出的正弦频率信号,分别采集到与正弦频率信号大小相对应的电压值,记为第一路电压信号,以及与正弦频率信号大小相对应的频率方波信号,记为第二路频率信号;
10.s2,对所述第一路电压信号和第二路频率信号分别进行中值滤波;
11.s3,对中值滤波后的信号进行变方差信息融合计算,得到飞机机轮速度。
12.本发明技术方案的特点和进一步的改进为:
13.(1)s3之后,所述方法还包括:s4,所述第一路电压信号或第二路频率信号故障时,
采用预设规则计算飞机机轮速度。
14.(2)s1具体为:第一路速度信号采集方法是将速度传感器输出的正弦频率信号通过迟滞比较电路和频压转换电路得到与正弦频率信号大小相对应的电压值,然后通过dsp的adc端口将电压值采集;第二路速度信号采集方法是将速度传感器输出的正弦频率信号通过迟滞比较电路和高速光耦器件输出与正弦频率信号大小相对应的频率方波信号,然后通过dsp的ecap端口进行采集。
15.(3)s2中,对所述第一路电压信号进行中值滤波具体为:
16.对于第一路电压值信号u,首先进行限幅,如果第一路电压值信号u大于3v,则当前值等于3v,然后进行中值滤波。
17.(4)s2中,对所述第二路频率信号进行中值滤波具体为;
18.对于第二路频率信号f,如果第二路频率信号f小于4550hz,则当前值设定为4550hz,然后进行中值滤波。
19.(5)s3,对中值滤波后的信号进行融合计算,得到飞机机轮速度,具体为:
[0020][0021]
其中,v
w,k
为k时刻融合后的速度,v
1,k
为k时刻第一路电压值所对应的速度,v
2,k
为k时刻第二路频率值所对应的速度,kk为两路速度信号的融合系数,p
k-1
为k-1时刻第一路速度信号的测量方差,q为第二路速度信号的测量方差,b为方差变化系数。
[0022]
(6)s4中,所述第一路电压信号或第二路频率信号故障具体为:
[0023]
无论电路发生短路或断路故障,dsp的adc端口只能采集到一个恒定不变的低电压值或高电压值,而没有高低电压的跳变则ecap端口采集到的频率值就为0;
[0024]
第一路速度信号存在高电压和低电压两种故障模式,而第二路速度信号只存在低电压一种故障模式。
[0025]
(7)s4具体为:
[0026]
s41,设置一段采样周期t,令k时刻两路速度信号之间的差值为δvk=|v
1,k-v
2,k
|,设置速度门限v
t1
和速度误差门限v
t2
,设置v
t1
的目的是为了通过轮速来间接判断飞机状态,设置v
t2
的目的是为了判断两路轮速信号是否差异过大;
[0027]
s42,如果在k时刻δvk≤v
t2
,则认为两轮速度信号均没有故障,将s3得到的k时刻融合后的速度作为最终的速度计算结果,vk=v
w,k
;
[0028]
s43,如果在k时刻δvk>v
t2
,且在k时刻之前的t个周期内[v
k-t
,
…
,v
k-1
]都小于v
t1
,则认为当前飞机速度较小,由于第二路速度信号只存在低电压一种故障模式,因此,如果v
1,k
>v
t1
则认为第一路速度信号有故障,则vk=v
2,k
;如果v
1,k
≤v
t1
则无法判断出具体哪路速度信号故障,但由于飞机速度小,不需要参与防滑计算,则令vk=v
w,k
,等待下次上电检测出具体哪路速度信号故障;
[0029]
s44,如果在k时刻δvk>v
t2
,且在k时刻之前的t个周期内[v
k-t
,
…
,v
k-1
]不是都小于v
t1
,则认为当前飞机速度较大,由于第二路速度信号只存在低电压一种故障模式,因此,如果v
2,k
>v
t1
则认为第一路速度信号有故障,则vk=v
2,k
;如果v
2,k
≤v
t1
则认为第二路速度信号有故障,则vk=v
1,k
。
[0030]
与现有的传统方法相比较,本发明具备如下优点:
[0031]
本发明分别使用硬件电路和dsp两种不同原理的采集方式进行速度信号采集,通过硬件模拟电路和软件程序逻辑双余度设计来获取机轮速度信号。同时使用限幅中值滤波算法将产品采集的速度信号进行降噪处理,再利用所提出的变方差信息融合算法将采集到的两路信号进行融合,以保证可以获取更精准的速度数据。此外,能够在飞机的整个刹车过程中实时进行轮速信号的故障检测,并保证在单路故障的情况下仍然可以获取机轮速度信号,提高了速度信号获取的可靠性。解决了传统刹车控制系统速度采集过程中的精度较差,抗干扰能力较弱和可靠性不高的问题。
附图说明
[0032]
图1是发明所提出的两路速度信号采集方法的原理图;
[0033]
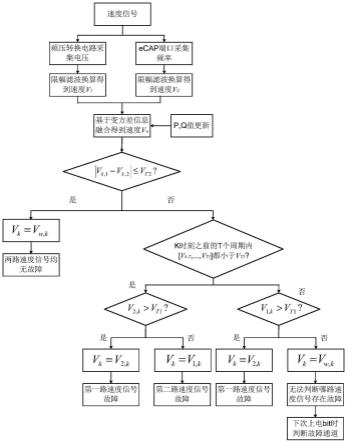
图2是发明所提出的两路速度信号的滤波与故障情况下轮速计算方法示意图;
[0034]
图3是发明所提出飞机机轮速度精准可靠测量方法的效果示意图。
具体实施方式
[0035]
下面结合附图对本发明的具体实施方式作进一步说明。
[0036]
本发明旨在通过模拟电路和软件程序逻辑双余度的方法,并通过所提出变方差信息融合方法和故障情况下轮速计算方法最终获取精准可靠的速度信号。
[0037]
如图2所示,本发明提供的一种飞机机轮速度精准可靠测量方法包括如下步骤:
[0038]
步骤一:两路速度信号的采集
[0039]
设计两路速度信号采集电路,第一路速度信号采集方法是将速度传感器输出的正弦频率信号通过迟滞比较电路和频压转换电路得到与正弦频率信号大小相对应的电压值,然后通过dsp的adc端口将电压值采集;第二路速度信号采集方法是将速度传感器输出的正弦频率信号通过迟滞比较电路和高速光耦器件输出与正弦频率信号大小相对应的频率方波信号,然后通过dsp的ecap端口进行采集。
[0040]
步骤二:两路速度信号的滤波与融合计算
[0041]
对于第一路采集的电压值u,首先进行限幅,所有采集的数据应该小于等于3v,如果大于3v,则当前值等于3v,然后进行中值滤波。对于第二路采集的频率方波信号f,所有采集的数据应该大于等于4550hz,如果小于4550hz,则当前值设定为4550hz,然后进行中值滤波。
[0042]
根据工程经验发现,第一路采集的电压所对应的速度信号v1初期误差小,而后期误差会变大,然而第二路采集的频率方波信号所对应的速度信号v2在整个周期误差比较稳定。因此,本发明提出变方差信息融合方法进行速度信号的融合,具体融合策略如下:
[0043][0044]
其中,v
w,k
为k时刻融合后的速度,v
1,k
为k时刻第一路采集的电压所对应的速度,v
2,k
为k时刻第二路采集的频率方波信号所对应的速度,kk为两路速度信号的融合系数,p
k-1
为k-1时刻第一路速度信号的测量方差,q为第二路速度信号的测量方差,b为方差变化系
数。
[0045]
步骤三:故障情况下轮速的计算
[0046]
通常情况下轮速的故障检测是给一个速度信号输入以检测采集到的输出是否和输入相等,但其仅在刹车控制盒上电时进行检测,而在飞机的整个刹车过程中不进行检测。本发明所提出的方法能够实时判断出两路速度信号哪一路有故障,且能在单路故障情况下可以采集到轮速信号。由于两路信号采集方式的不同,使得第一路速度信号存在高电压和低电压两种故障模式,而第二路速度信号只存在低电压一种故障模式。这是因为无论电路发生短路或断路哪种故障,dsp的ecap端口只能采集到一个恒定不变的低电压值或高电压值,而没有高低电压的跳变则ecap端口采集到的频率值就为0。基于上述原因,本专利设计下述的轮速计算方法。
[0047]
设置一段采样周期t,令k时刻两路速度信号之间的差值为δvk=|v
1,k-v
2,k
|,设置速度门限v
t1
和速度误差门限v
t2
,设置v
t1
的目的是为了通过轮速来间接判断飞机状态,设置v
t2
的目的是为了判断两路轮速信号是否差异过大。
[0048]
如果在k时刻δvk≤v
t2
,则认为两轮速度信号均没有故障,将步骤二k时刻融合后的速度作为最终的速度计算结果,vk=v
w,k
。
[0049]
如果在k时刻δvk>v
t2
,且在k时刻之前的t个周期内[v
k-t
,
…
,v
k-1
]都小于v
t1
,则认为当前飞机速度较小,由于第二路速度信号只存在低电压一种故障模式,因此,如果v
1,k
>v
t1
则认为第一路速度信号有故障,则vk=v
2,k
。如果v
1,k
≤v
t1
则无法判断出具体哪路速度信号故障,但由于飞机速度小,不需要参与防滑计算,则可以令vk=v
w,k
,等待下次上电bit检测出具体哪路速度信号故障。
[0050]
如果在k时刻δvk>v
tz
,且在k时刻之前的t个周期内[v
k-t
,
…
,v
k-1
]不是都小于v
t1
,则认为当前飞机速度较大,由于第二路速度信号只存在低电压一种故障模式,因此,如果v
2,k
>v
t1
则认为第一路速度信号有故障,则vk=v
2,k
。如果v
2,k
≤v
t1
则认为第二路速度信号有故障,则vk=v
1,k
。
[0051]
为证明本发明的效果,以某型号飞机刹车系统为例,结合附图和具体实施方式,按照以下步骤进行实施:
[0052]
步骤一:两路速度信号的采集
[0053]
设计两路速度信号采集电路如图1所示。将速度信号进行4v的偏置,高速运放和r6组成正反馈电路,结合r6和r4分压电路后可形成施密特触发器特性电路,输出矩形方波信号到后端两路速度信号采集电路。
[0054]
第一路速度信号采集方法:矩形方波信号经过频压转换电路得到与正弦频率信号大小相对应的电压值,然后通过dsp的adc端口将电压值采集;
[0055]
第二路速度信号采集方法:矩形方波信号经过开关特性为上升时间小于30ns的高速光耦器件将信号整形,输出0到3.3v的矩形波速度信号到dsp的ecap端口进行采集。
[0056]
步骤二:两路速度信号的滤波与融合计算
[0057]
1)采集两路信号。
[0058]
2)对采集信号进行限幅,第一路采集的电压值应该小于等于3v,如果大于3v,则当前值设定为3v。第二路采集的频率方波信号,其周期应该小于等于4550hz,如果大于4550hz,则当前值设定为4550hz。
[0059]
在k时刻将两路采集到的速度信号进行上下限约束,并分别按照下式进行计算。
[0060][0061]
其中,uk代表k时刻第一路采集的电压值,单位为v。v
1,k
为电压uk经转换后所得速度值,单位为km/h。
[0062][0063]
其中,fk代表k时刻第二路采集的频率值,单位为hz。v
2,k
为频率f经转换后所得速度值,单位为km/h。
[0064]
对于采集到的电压值uk和频率值fk,分别先对两路信号进行中值滤波,再按照公式(1)和公式(2)进行换算后分别得到一路与电压值相关的速度信号v
1,k
和与频率值相关的速度信号v
2,k
。
[0065]
3)按照本发明提出变方差信息融合方法进行速度信号的融合,具体融合策略如下:
[0066][0067]
其中,v
w,k
为k时刻融合后的速度,v
1,k
为k时刻第一路采集的电压所对应的速度,v
2,k
为k时刻第二路采集的频率方波信号所对应的速度,kk为两路速度信号的融合系数,p
k-1
为k-1时刻第一路速度信号的测量方差,q为第二路速度信号的测量方差,b为方差变化系数。基于对采集到的速度数据的分析,本实施例中,第一路速度信号的测量方差的初始值p0=8km/h,b=0.022,第二路速度信号的测量方差q=2km/h。
[0068]
步骤三:故障情况下轮速的计算
[0069]
设置一段采样周期t=5,令δvk=|v
1,k-v
2,k
|,设置速度门限v
t1
=26km/h和轮速间误差门限v
t2
=6km/h,设置v
t1
的目的是为了通过轮速来间接判断飞机状态,设置v
t2
的目的是为了判断两路轮速信号是否差异过大。
[0070]
如果在k时刻δv≤6km/h,则认为两轮速度信号均没有故障,将步骤二k时刻融合后的速度作为最终的速度计算结果,v=v
w,k
。
[0071]
如果在k时刻δv>6km/h,且在k时刻之前的5个周期内[v
k-t
,
…
,v
k-1
]都小于26km/h,则认为当前飞机速度较小,由于第二路速度信号只存在低电压一种故障模式,因此,如果v
1,k
>26km/h则认为第一路速度信号有故障,则vk=v
2,k
。如果v
1,k
≤26km/h则无法判断出具体哪路速度信号故障,但由于飞机速度小,不需要参与防滑计算,则可以令vk=v
w,k
,等待下次上电bit检测出具体哪路速度信号故障。
[0072]
如果在k时刻δv>6km/h,且在k时刻之前的5个周期内[v
k-t
,
…
,v
k-1
]不是都小于26km/h,则认为当前飞机速度较大,由于第二路速度信号只存在低电压一种故障模式,因此,如果v
2,k
>26km/h则认为第一路速度信号有故障,则vk=v
2,k
。如果v
2,k
≤26km/h则认为第二路速度信号有故障,则vk=v
1,k
。
[0073]
从图3仿真结果可以看出,在6s之前,综合速度信号等于第一路速度信号和第二路速度信号的融合值。在6s时第一路速度信号发生故障之后,综合速度信号就等于第二路速度信号的大小。综上所述,本发明提出变方差信息融合方法和故障情况下轮速计算方法能够获取精准可靠的速度信号。
[0074]
与现有的传统方法相比较,本发明具备如下优点:
[0075]
本发明分别使用硬件电路和dsp两种不同原理的采集方式进行速度信号采集,通过硬件模拟电路和软件程序逻辑双余度设计来获取机轮速度信号。同时使用限幅中值滤波算法将产品采集的速度信号进行降噪处理,再利用所提出的变方差信息融合算法将采集到的两路信号进行融合,以保证可以获取更精准的速度数据。此外,能够在飞机的整个刹车过程中实时进行轮速信号的故障检测,并保证在单路故障的情况下仍然可以获取机轮速度信号,提高了速度信号获取的可靠性。解决了传统刹车控制系统速度采集过程中的精度较差,抗干扰能力较弱和可靠性不高的问题。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1