多频多模非组合精密单点定位瞬时窄巷模糊度固定方法
本发明涉及全球卫星导航系统精密定位,尤其是一种多频多模非组合精密单点定位瞬时窄巷模糊度固定方法。
背景技术:
1、在精密单点定位(global navigation satellite system,ppp)中,要实现瞬时单历元厘米级定位精度,必须实现瞬时的窄巷模糊度固定。通过首先固定一系列波长较长、噪声较小的宽巷模糊度,进而加速窄巷模糊度的固定,实现多频多模非组合ppp的快速收敛。此外,只利用瞬时宽巷模糊度固定还可以实现全球单历元分米级定位。然而,要实现瞬时单历元厘米级定位,窄巷模糊度固定是必须的。而传统的单系统窄巷模糊度计算方法,得到的窄巷模糊度精度较差,致使定位结果较低。但随着北斗3系统星座的部署完成,全球范围内播发多频信号的卫星数目得以极大增加,极大地改善了全球用户的空间几何构型。通过使用当前的gps、galileo、bds-2和bds-3系统的全频信号,有望在实现全球范围内瞬时窄巷模糊度固定。
技术实现思路
1、本发明实施例的一个目的是解决至少上述问题和/或缺陷,并提供至少后面将说明的优点。
2、本发明实施例提供了多频多模ppp全球瞬时窄巷模糊度固定方法,其可以实现对于窄巷模糊度的瞬时固定,实现瞬时厘米级定位。
3、第一方面,提供了一种多频多模ppp全球瞬时窄巷模糊度固定方法,包括:
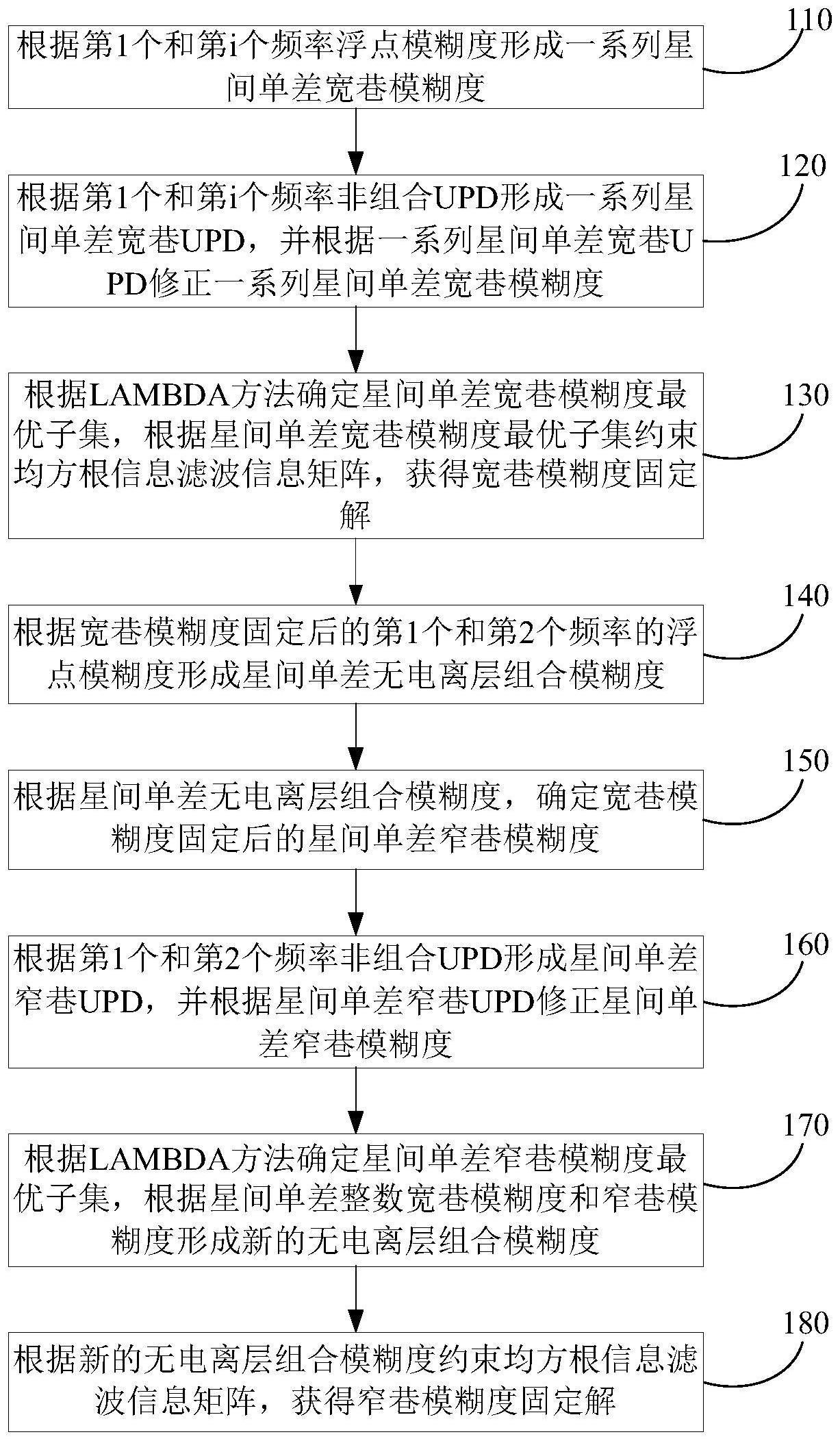
4、根据第1个和第i个频率浮点模糊度形成一系列星间单差宽巷模糊度;
5、根据第1个和第i个频率非组合upd形成一系列星间单差宽巷upd,并根据一系列星间单差宽巷upd修正一系列星间单差宽巷模糊度;
6、根据lambda方法确定星间单差宽巷模糊度最优子集,根据星间单差宽巷模糊度最优子集约束均方根信息滤波信息矩阵,获得宽巷模糊度固定解;
7、根据宽巷模糊度固定后的第1个和第2个频率的浮点模糊度形成星间单差无电离层组合模糊度;
8、根据星间单差无电离层组合模糊度,确定宽巷模糊度固定后的星间单差窄巷模糊度;
9、根据第1个和第2个频率非组合upd形成星间单差窄巷upd,并根据星间单差窄巷upd修正星间单差窄巷模糊度;
10、根据lambda方法确定星间单差窄巷模糊度最优子集,根据星间单差整数宽巷模糊度和窄巷模糊度形成新的无电离层组合模糊度;
11、根据新的无电离层组合模糊度约束均方根信息滤波信息矩阵,获得窄巷模糊度固定解。
12、可选地,所述根据第1个和第i个频率浮点模糊度形成一系列星间单差宽巷模糊度,包括:
13、根据第1个和第i个频率模糊度之差,确定一系列星间单差宽巷模糊度;
14、所述根据第1个和第i个频率非组合upd形成一系列星间单差宽巷upd,并根据一系列星间单差宽巷upd修正一系列星间单差宽巷模糊度,包括:
15、根据第1个和第i个频率非组合upd形成一系列星间单差宽巷upd,对一系列星间单差宽巷模糊度修正,确定修正之后的一系列星间单差宽巷模糊度。
16、可选地,所述根据lambda方法确定星间单差宽巷模糊度最优子集,根据星间单差宽巷模糊度最优子集约束均方根信息滤波信息矩阵,获得宽巷模糊度固定解,包括:
17、根据lambda方法的部分模糊度固定策略搜索星间单差宽巷模糊度最优子集,将所得的星间单差宽巷模糊度最优子集作为精确的距离观测值对信息矩阵进行强约束,基于householder变换对信息矩阵重新上三角化,采用求逆运算获得宽巷模糊度固定解。
18、可选地,所述利用宽巷模糊度固定后的第1频率和第2频率的浮点模糊度,确定星间单差无电离层组合模糊度,包括:
19、通过以下公式计算星间单差无电离层组合模糊度:
20、
21、其中,是导航系统s中第1频率和第2频率所构成的星间单差无电离层组合模糊度,和分别是宽巷模糊度固定后的导航系统s中的第1频率和第2频率浮点模糊度,和分别为第1频率和第2个频率的频率值。
22、可选地,所述根据第1个和第2个频率非组合upd形成星间单差窄巷upd,并根据星间单差窄巷upd修正星间单差窄巷模糊度,包括:
23、根据第1个和第2个频率非组合upd形成星间单差窄巷upd;
24、根据星间单差窄巷upd修正星间单差窄巷模糊度,通过以下公式计算星间单差窄巷模糊度:
25、
26、
27、其中,是导航系统s中改正后的星间单差窄巷模糊度,是导航系统s中第1频率和第2频率所组成星间单差宽巷模糊度固定解,是导航系统s中宽巷模糊度固定后的星间单差无电离层组合模糊度,和分别为第1频率和第2频率的频率值,是导航系统s中星间单差窄巷upd,和分别是第1频率和第2频率的upd。
28、可选地,所述根据lambda方法确定星间单差窄巷模糊度最优子集,根据星间单差整数宽巷模糊度和窄巷模糊度形成新的无电离层组合模糊度,包括:
29、根据lambda方法的部分模糊度固定策略搜索星间单差窄巷模糊度最优子集;
30、根据星间单差整数宽巷模糊度和窄巷模糊度形成新的无电离层组合模糊度;
31、通过以下公式计算新的星间单差无电离层组合模糊度:
32、
33、其中,是导航系统s中重构后的星间单差无电离层组合模糊度。
34、可选地,所述根据新的无电离层组合模糊度约束均方根信息滤波信息矩阵,获得窄巷模糊度固定解,包括:
35、利用新的无电离层组合模糊度对的信息矩阵进行约束,通过householder变换实现对信息矩阵的重新上三角化,采用逆运算获得窄巷模糊度固定解。
36、本发明实施例至少包括以下有益效果:
37、本发明实施例提供的多频多模ppp全球瞬时窄巷模糊度固定方法,,包括:根据第1个和第i个频率浮点模糊度形成一系列星间单差宽巷模糊度;根据第1个和第i个频率非组合upd形成一系列星间单差宽巷upd,并根据一系列星间单差宽巷upd修正一系列星间单差宽巷模糊度;根据lambda方法确定星间单差宽巷模糊度最优子集,根据星间单差宽巷模糊度最优子集约束均方根信息滤波信息矩阵,获得宽巷模糊度固定解;根据宽巷模糊度固定后的第1个和第2个频率的浮点模糊度形成星间单差无电离层组合模糊度;根据星间单差无电离层组合模糊度,确定宽巷模糊度固定后的星间单差窄巷模糊度;根据第1个和第2个频率非组合upd形成星间单差窄巷upd,并根据星间单差窄巷upd修正星间单差窄巷模糊度;根据lambda方法确定星间单差窄巷模糊度最优子集,根据星间单差整数宽巷模糊度和窄巷模糊度形成新的无电离层组合模糊度;根据新的无电离层组合模糊度约束均方根信息滤波信息矩阵,获得窄巷模糊度固定解。基于上述方法,其通过导航系统的多频信号,瞬时固定至少一个频率组合的宽巷模糊度,再基于宽巷模糊度固定解计算窄巷模糊度固定解,加速了窄巷模糊度的固定过程,实现了对于窄巷模糊度的瞬时固定,从而可以达到瞬时厘米级定位精度。
38、本发明实施例的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本发明实施例的研究和实践而为本领域的技术人员所理解。
- 还没有人留言评论。精彩留言会获得点赞!