基于惯性导航的高速磁悬浮轨道不平顺检测系统及方法与流程
1.本发明涉及高速磁悬浮轨道检测技术领域,尤其涉及一种基于惯性导航的高速磁悬浮轨道不平顺检测系统及方法。
背景技术:
2.高速磁浮列车是一种与轨道无接触并高速运行的新型地面交通工具,其轨道由预应力混凝土梁、连接件、功能件以及具有齿槽结构分段拼接的长定子组成。列车通过悬浮电磁铁和导向电磁铁实现主动控制,利用长定子轨道上的长定子电机获取牵引动力,轨道与电磁铁的间隙约为12 mm。在高速磁浮的运营期间,轨道的几何参数会因螺栓松动、基础沉降及外力等因素会发生变化,该变化直接影响着车辆运营的安全性、稳定性和舒适性。为减少轨道对列车运营的影响,需保持轨道的良好状态,对轨道定期检测和维护是十分重要的。
3.针对高速磁浮列车轨道检测监测,目前只有德国、日本和中国开展了相关研究。其中,日本采用的是超导排斥悬浮技术,轨道结构与德国和中国的不同。轨道的不平顺可采用静态检测方式,主要检测设备为全站仪,该设备在120 m 内的测距精度可达0.5 mm
±
1 ppm,但是该设备的测量基准是地面以及轨道平台,因此只能在夜间无列车运营时进行检测,在测量过程中需要3 名工作人员一同操作,该测量系统及方法含较多人为因素且检测周期较长,测量效率很低。
4.上海磁浮交通发展有限公司设计了一种常导电磁悬浮式轨道巡检车,采用长定子直线电机和支撑轮结构的混合牵引模式,最高检测速度为200km/h,专用的高速磁悬浮轨检车和综合检测列车价格昂贵,技术复杂,要保持整个系统正确稳定地工作代价高昂。目前上海高速磁浮示范线的列车将车载悬浮间隙传感器、悬浮加速度传感器和测速定位传感器的数据传送到车头上的2台专用计算机中,在车载计算机中完成整个数据的采集工作,然后将数据传输至诊断系统,离线处理得到轨道不平顺信息。然而,该系统存在着设备的可移植性较差、车载传感器和车载计算机不易移植等不足。
5.上述高速磁悬浮轨道动态检测技术的发展主要是采用了惯性基准法,主要是将加速度计、陀螺仪和激光测距传感器等设备安装在机车的不同部位用于直接或间接地采集位移和加速度等信息,进而推断轨道的几何状态。其基本原理为:通过加速度传感器的测量值在运动的列车电磁铁上建立一个惯性参考基准,再利用间隙传感器测量电磁铁与轨道之间的间隙值计算出相对于基准的位置,计算得到轨道垂向不平顺和导向不平顺。基于惯性基准法的磁悬浮轨道测量系统及方法直接对惯性器件的原始测量值进行处理,然而惯性器件的测量精度受到多种因素的影响而不断发散,最主要的因素是加速计零偏、陀螺零偏等惯性传感器误差,并且传感器误差会随时间累积,测量精度随时间下降,这种系统及方法未能实现对惯性器件原始测量信息的最优化处理,难以有效估计和补偿惯性传感器误差。
技术实现要素:
6.针对高速磁悬浮轨道静态检测技术和基于惯性基准法的动态检测技术所存在的
缺陷,本发明提出了一种基于惯性导航的高速磁悬浮轨道不平顺检测系统及方法,采用基于惯性导航的多传感器组合导航测量技术,高精度和高效率的完成高速磁悬浮轨道不平顺精密测量。
7.为了实现上述目的,本发明的一种基于惯性导航的高速磁悬浮轨道不平顺检测系统,包括:轻型移动测量车体、安装于所述轻型移动测量车体的传感器和数据采集模块,所述传感器包括ins/gnss组合惯性导航系统、激光测距传感器、里程计和倾角传感器;其中,ins/gnss组合惯性导航系统和激光测距传感器安装于轻型移动测量车体的搭载平台上,ins/gnss组合惯性导航系统包含惯性测量单元、gnss接收机与天线,所述惯性测量单元包含三轴陀螺仪和三轴加速度计,用来测量轻型移动车体的三维角速度和三维加速度,gnss接收机与天线用来提供绝对位置坐标;所述轻型移动测量车体的左右车轮各安装一个里程计,用来测量轻型移动车体沿轨道方向的行走里程并相互检核;所述轻型移动测量车体的搭载平台的左右各安装一个激光测距传感器,用于同时测量搭载平台与高速磁悬浮轨道定子面间的距离。
8.在进行不平顺检测时,按照如下过程对惯性测量单元进行初始化:提取轻型移动测量车体的精确里程,按照提取的里程查找高速磁悬浮轨道的设计参数中的所属平曲线段落、方位角d、偏向p、段落起点和终点的曲率半径r1和r
2 以及段落起点和终点的里程l;按照如下公式计算初始化的姿态参数:航向角为;俯仰角为;横滚角为;ln为轻型移动测量车体的当前位置距离段落起点的距离;为位于前直坡段的俯仰角;为位于竖曲线段的俯仰角;为位于后直坡段的俯仰角;s1为前直坡段;s2为后直坡段;lv为轻型移动测量车体当前所在里程的纵断面的段落长度;ls为轻型移动测量车体的当前位置距离段落起点的距离;e和g分别为当前轻型移动测量车体所在里程处的超高、轨距。
9.进一步优选的,所述搭载平台采用螺丝杠杆与轻型移动测量车体连接,实现搭载平台在一定范围内的自由升降。
10.进一步优选的,所述轻型移动测量车体通过万向轮在高速磁悬浮轨道上移动,左右两侧万向轮使装置前进方向和轨道方向一致。
11.本发明还提供一种基于惯性导航的高速磁悬浮轨道不平顺检测方法,采用上述检测系统,对高速磁悬浮轨道进行检测,包括以下步骤:s1、对惯性测量单元、gnss、里程计、倾角传感器和激光测距传感器进行同步校时;s2、根据陀螺输出的角速度、加速度计输出的比力和里程计速度数据;对车体是否处于静止状态进行判断,当角速度、比力、里程计速度均小于阈值时,可判定车体处于静止状态;s3、采用基于卡尔曼滤波的松组合将gnss和ins定位结果进行融合,融合前将卫星定位结果进行状态转移后再与组合导航系统进行融合解算:融合后建立微分状态方程,同
时根据微分状态方程的定位结果,对定位结果和车体运动状态建立观测方程;s4、获取惯导的三维位置和姿态,计算搭载平台的三维位置和姿态;s5、根据获取的行走里程和姿态角对搭载平台的高程进行重构,计算高速磁悬浮轨道定子面高程:其中,为定子面高程,h
p
为重构后的高程;sz为激光测距传感器进行处理后测得的搭载平台到定子面距离;s6、根据定子面高程进行纵断面线形拟合,线形拟合以定子面高程到拟合线形的几何距离平方和最小为原则,采用最小二乘进行参数估计。由拟合线形和定子面高程计算得到轨道偏差量,由偏差量计算高速磁悬浮轨道的不平顺性。
12.进一步优选的,在s3中,还包括采用如下公式将卫星定位结果进行状态转移后再与组合导航系统进行融合解算:其中,表示延迟前的卫星定位结果,表示状态转移后与惯性导航系统同步的位置结果,表示y时刻到x时刻的状态转移矩阵,表示y时刻到x时刻的状态转移矩阵的转置矩阵;表示状态转移前的误差向量,表示状态转移后的误差向量,为中间变量;表示协方差矩阵;为j时刻到x时刻的状态转移矩阵;为j时刻到x时刻的状态转移矩阵的转置矩阵;x为状态转移后与惯性导航系统同步的采样历元;y为延迟前卫星采样历元。
13.进一步优选的,在s3中,所述微分状态方程采用如下公式建立:其中,c系为计算坐标系,p系为平台坐标系,i系为惯性坐标系,e系为地球坐标系,b系为传感器坐标系,为速度误差,fc是加速度计比力测量值,ψ为姿态角误差,w
iec
为c系下e系相对于i系的旋转角速度,w
ecc
为c系下e系相对于c系的旋转角速度,δgc为重力加速度误差, 是系与p系之间坐标变换的方向余弦矩阵,δfb为是加速度计的输出误差向量,w
icc
为 c系下c系相对于i系的旋转角速度 ,δw
ibb
是陀螺的输出误差向量,为位置误差,、、分别表示速度误差、姿态角误差和位置误差的微分。
14.进一步优选的,还包括当gnss观测环境良好时,采用基于载波相位的动态后处理gnss定位结果对惯导进行约束,根据卡尔曼信息对gnss定位结果进行抗差检测,剔除gnss粗差数据,当途经卫星遮挡环境时,采用非完整性约束、里程计辅助和判断出的磁悬浮轨道检测小车静止状态对惯导进行约束。
15.进一步优选的,在s5中,采用如下公式根据获取的行走里程和姿态角对搭载平台的高程进行重构:其中:hs是搭载平台初始高程,t为起点s到测点p的采样总数,θi为搭载平台的俯仰角,
∆
li为水平距离增量;
进一步优选的,在s5中,还包括对激光测距传感器的采集信号进行处理,根据数据的阶跃值,消除信号中的齿槽纹波。
16.本发明相比于现有技术,至少具有以下优点:1、本发明不依赖地面控制点,充分利用惯导的相对测量能力和车体沿轨道运动的运动特点,可以实现高速磁悬浮轨道不平顺的快速、高精度的测量,在保证测量精度的同时,可以大大提升测量效率。
17.2、本发明可以独立进行工作,也可挂载于综合检测车,不受运动牵引设备的测量速度限制,系统的可移植性强,便于上线作业。
18.3、本发明ins/gnss组合惯性导航系统可以提供厘米级的轨道绝对位置坐标,可以精确确定高速磁悬浮轨道不平顺发生的位置,不存在里程累计误差问题,同时还可实现高精度的磁悬浮轨道不平顺相对测量。
19.4、本发明复杂程度低、计算效率高,且易于实现,系统可以容易实现高精度时间同步。
附图说明
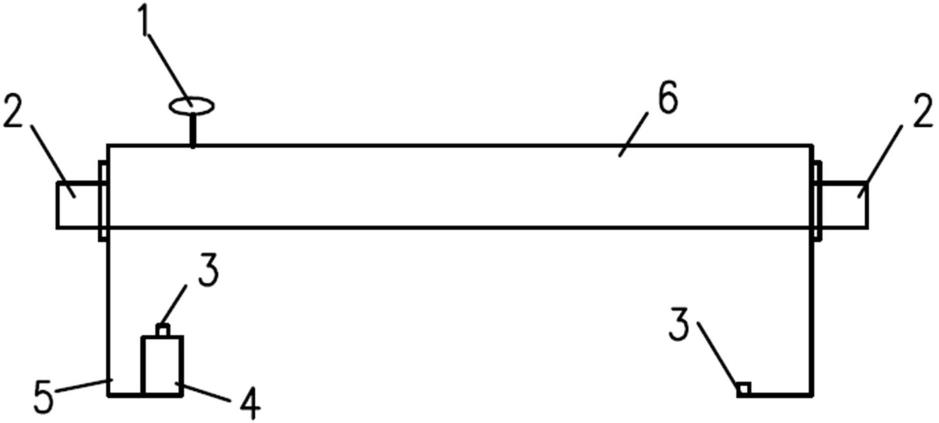
20.图1为本技术基于惯性导航的高速磁悬浮轨道不平顺检测系统正视图;图2为本技术基于惯性导航的高速磁悬浮轨道不平顺检测方法流程图;图3为本技术惯导、里程计、gnss等多传感器组合导航定位定姿流程图。
21.图中:1、gnss天线;2、万向轮;3、激光测距传感器;4、惯性导航系统;5、搭载平台;6、轻型移动测量车体。
具体实施方式
22.以下通过附图和具体实施方式对本发明作进一步的详细说明。
23.如图1所示,本发明一方面实施例提供的一种基于惯性导航的高速磁悬浮轨道不平顺检测系统,包含测量设备和数据采集模块,测量设备和数据采集模块均安装于轻型移动测量车体,轻型移动测量车体可采用自移动方式或者挂载于综合检测车,不受测量速度限制。如图1所示,轻型移动测量车体6上设有gnss天线1;轻型移动测量车体6下方安装万向轮2,测量时万向轮和轨道时刻保持刚性接触,搭载平台5的高度可在一定范围内进行自由调节。激光测距传感器3,在搭载平台5左右各安装一个。惯性导航系统4可选用高精度光纤惯导或者激光惯导,陀螺零偏稳定性不大于0.01deg/h,gnss接收机板卡可内置于惯导中,也可分体式安装于车体内部。里程计与万向轮相连,左右车轮各安装一个,用于检核。本发明车体不限于“t”形、“h”形或者其它形状的高速磁悬浮轨道不平顺检测轻型移动测量小车。
24.惯性导航系统、gnss、里程计、激光测距传感器、倾角传感器组成车体测量设备,惯性导航系统由三轴陀螺仪和三轴加速度组成,三轴陀螺仪用来测量三维角速度,三轴加速度计用来测量三维加速度,gnss用来测量轨道的绝对位置,里程计用来测量轻型移动车体沿轨道方向的行走里程,误差不大于千分之二,即行走1公里,误差不超过2m。左右两侧搭载平台各安装一个激光测距传感器,分别测量两侧搭载平台与高速磁悬浮轨道定子面间的距
离。里程计、gnss相位中线、搭载平台、惯导中心、激光测距传感器间的位置关系和姿态关系已事先测量或标定。
25.在进行不平顺检测时,按照如下过程对惯性测量单元进行初始化:提取轻型移动测量车体的精确里程,按照提取的里程查找高速磁悬浮轨道的设计参数中的所属平曲线段落、方位角d、偏向p、段落起点和终点的曲率半径r1和r
2 以及段落起点和终点的里程l;按照如下公式计算初始化的姿态参数:航向角为;俯仰角为;横滚角为;其中ln为轻型移动测量车体的当前位置距离段落起点的距离;s1为前直坡段;s2为后直坡段;为位于前直坡段的俯仰角;为位于竖曲线段的俯仰角;为位于后直坡段的俯仰角;lv为轻型移动测量车体当前所在里程的纵断面的段落长度;ls为轻型移动测量车体的当前位置距离段落起点的距离;e和g分别为当前轻型移动测量车体所在里程处的超高、轨距。
26.本发明还提供一种基于惯性导航的高速磁悬浮轨道不平顺检测方法是将上述系统采集模块采集的里程计、倾角传感器、惯导、激光测距传感器、gnss等传感器的数据进行数据融合和数据解算,从而进一步评估评估高速磁悬浮轨道的不平顺性,如图2所示。
27.步骤1、多传感器的时间同步可以通过gnss秒脉冲或者同一晶体振荡器实现,通过各传感器输出数据打上统一的gnss时间标签或者晶体振荡器的时间标签,来将个各传感器的数据输出进行时间同步。虽然数据采集系统的晶体振荡器可能存在系统偏差和时间的不稳定性,但这一绝对误差对于所有的传感器来说都是系统性的,并不影响传感器相互间的时间同步。特别地,对于gnss 与惯导之间的时间同步,gnss 数据与惯导数据同步提取技术通过秒脉冲使gnss 数据和惯导数据处于完全相同的时间域。
28.步骤2、采集多段磁悬浮轨道检测小车处于完全静止状态的数据,计算陀螺输出的三轴角速度、加速度计输出的三轴比力和里程计数据的均方根,并根据此均方根设计七个阈值,当三轴角速度、三轴比力、里程计数据均小于阈值时,可判定车体处于静止状态,根据误判率和漏判率可以对阈值进行一定调整。
29.步骤3、采用基于卡尔曼滤波的松组合将惯导、里程计、gnss等数据进行融合,融合前将卫星定位结果进行状态转移后再与组合导航系统进行融合解算:融合后建立惯性传感器误差方程如下:式中,c系为计算坐标系,p系为平台坐标系,i系为惯性坐标系,e系为地球坐标系,b系为传感器坐标系,为速度误差,fc是加速度计比力测量值,ψ为姿态角误差,w
iec
为c系下e系相对于i系的旋转角速度,w
ecc
为c系下e系相对于c系的旋转角速度,δgc为重力加速度误差, 是b系与p系之间坐标变换的方向余弦矩阵,δfb为是加速度计的输出误差向量,w
icc
为 c系下c系相对于i系的旋转角速度 ,δw
ibb
是陀螺的输出误差向量,为位置误差;、、
分别表示速度误差、姿态角误差和位置误差的微分。
30.采用如下公式将卫星定位结果进行状态转移后再与组合导航系统进行融合解算:其中,表示延迟前的卫星定位结果,表示状态转移后与惯性导航系统同步的位置结果,表示y时刻到x时刻的状态转移矩阵,表示y时刻到x时刻的状态转移矩阵的转置矩阵;表示状态转移前的误差向量,表示状态转移后的误差向量,为中间变量;表示协方差矩阵;为j时刻到x时刻的状态转移矩阵;为j时刻到x时刻的状态转移矩阵的转置矩阵;x为状态转移后与惯性导航系统同步的采样历元;y为延迟前卫星采样历元。
31.还包括将状态转移后的高精度卫星定位结果与惯性导航系统进行融合解算获取惯导的三维位置和姿态,采用最优平滑算法进一步提高高速运动状态下的位置和姿态精度,式中,λ取值m-1,m-2,...0;m表示总的历元时刻;k表示反向平滑的增益矩阵,表示最优平滑后的组合导航定位结果,表示λ时刻的导航定位结果;表示m时刻到λ+1时刻的导航定位结果;表示λ到λ+1时刻的导航定位结果;d表示误差协方差阵;表示λ时刻的状态转移矩阵的转置矩阵。
32.根据惯导和搭载平台的固定杆臂、安装角度关系和最优平滑后的组合导航定位结果来计算搭载平台的三维位置和姿态。
33.最后,将里程计比例因子建模为随时游走,将其增广到微分状态方程,同时根据gnss定位结果和车体运动状态建立观测方程:其中,为系中imu中心到天线相位中心矢量,c
bn
为传感器坐标系与导航坐标系之间坐标变换的方向余弦矩阵,c
bv
为传感器坐标系与载体坐标系之间坐标变换的方向余弦矩阵,c
en
为地球坐标系与导航坐标系之间坐标变换的方向余弦矩阵,为惯导获得e系下的位置,为惯导获得系下的位置,为gnss坐标在e系下的投影,er为gnss测量误差,ψ为姿态角误差。
34.里程计的输出即为磁悬浮轨道检测小车前进方向的速度,里程计速度可以用来辅助惯导系统,系下的观测方程表示为:式中,为imu计算推导出的车轮估计速度,为里程计输出速度,为里程计杆臂,为里程计输出误差,为惯导获得系下的速度,为传感器坐标系与载体坐标系之间坐标变换的方向余弦矩阵;为速度误差;是陀螺的输出误差向量;ψ为姿态角误差。
35.步骤4、如图3所示,当gnss观测环境较好时,采用基于载波相位的动态后处理(post processedkinematic,ppk)gnss定位结果对惯导进行约束,并利用惯导短时高精度的特点,根据卡尔曼信息对gnss定位结果进行抗差检测,剔除gnss粗差数据,当经过隧道等
卫星遮挡环境时,采用非完整性约束、里程计辅助和判断出的磁悬浮轨道检测小车静止状态对惯导进行约束,用此组合定位方式获取惯导的三维位置和姿态,进行反向平滑进一步提高位置和姿态精度,并根据惯导和搭载平台的固定杆臂和安装角度关系来计算搭载平台的三维位置和姿态。
36.步骤5、使用获取的姿态角对搭载平台的高程进行重构:其中是搭载平台初始高程,t为起点s到测点p的采样总数,θi为搭载平台的俯仰,
∆
li为水平距离增量;步骤6、高速磁悬浮轨道定子面具有齿槽结构的几何特性,虽然定子面安装了长定子线缆,但是定子面仍然不是完整的平面,因此使用激光测距传感器测量的数据会有“齿槽纹波”,根据数据的阶跃值对数据进行处理来消除“齿槽效应”,但需保证空间采样率足够高,本发明采用的激光测距传感器空间采样间隔为2mm。
37.步骤7、获取高速磁悬浮轨道定子面高程:其中,为定子面高程,为重构后的高程;为激光测距传感器进行处理后测得的搭载平台到定子面距离。
38.步骤8、根据定子面高程进行纵断面线形拟合,计算得到轨道偏差量,由偏差量计算高速磁悬浮轨道的不平顺性,当存在原始设计曲线及轨道要素时,也可不进行线形拟合,由原始设计资料计算轨道偏差量。
39.显然,上述实施例仅是为清楚地说明所作的举例,而并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引伸出的显而易见的变化或变动仍处于本发明创造的保护范围之中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1
- 中低速磁浮交通工程双线填方地段桩基托梁式承轨梁过渡段结构的制造方法与工艺
- 中低速磁浮单线填方地段桩基复合式承轨梁过渡段结构的制造方法与工艺
- 中低速磁浮交通工程单线挖方地段桩基复合式承轨梁结构的制造方法与工艺
- 中低速磁浮单线挖方地段桩基复合式承轨梁过渡段结构的制造方法与工艺
- 中低速磁浮交通工程单线填方地段桩基托梁式承轨梁结构的制造方法与工艺
- 中低速磁浮交通工程双线填方地段桩基托梁式承轨梁结构的制造方法与工艺
- 中低速磁浮双线填方地段桩基复合式承轨梁过渡段结构的制造方法与工艺
- 中低速磁浮双线挖方地段桩基复合分幅式承轨梁过渡段结构的制造方法与工艺
- 中低速磁浮交通工程双线挖方地段桩基复合式承轨梁结构的制造方法与工艺
- 中低速磁浮双线挖方地段桩基托梁式承轨梁过渡段结构的制造方法与工艺