基于内河船舶经纬度数据的弯道识别方法
本发明属于船舶能源管理领域,具体涉及一种能源管理方法中内河船舶航速优化前期,用于航线分段的一种弯道识别方法。
背景技术:
1、节能减排是当今时代的重要主题。船舶作为大宗商品的运载工具,世界贸易总额的80%以上是由其进行,在国际贸易以及区域经济发展中具有重要的支撑作用,但因此船舶也被认为是交通运输业燃料消耗的最大贡献者。根据相关的研究,将船舶航行速度在设计速度的基础上降低2~3节,会很大程度上减少船舶燃油消耗,降低运营成本,因此航速优化是更简洁高效的船舶能效提高方法。
2、对于内河船舶而言,航线基本固定、重复性高,内河水文周期性变化明显,尤其是集装箱船和大宗货物运输,需求量稳定,发送时间稳定,因此对内河船舶固定航线下进行降低航速的优化管理是有重要意义的。在固定航线下,在满足航期要求下,通过对航速的优化管理,可以达到航次总油耗量最低、二氧化碳排放最少的目的,进而实现内河船舶节能减排、降低燃油成本的目的。
3、基于此,内河船舶固定航线下进行降低航速的优化管理,需要内河船舶航速优化前期的航线分段进行支撑,其中,内河弯道识别是支撑的重要技术路线,对更准确识别的弯道处,要求船舶减速过弯,不仅提高船舶过弯安全性,也可以根据弯道情况进行降低航速的优化管理。以往学者在内河船舶航线优化的航线分段中,通常采用手动根据途径城市分段:如航线武汉至上海,分为武汉至九江段、九江至南京段和南京至上海段。或采用手动根据航线图中弯道分段。这种方式下,内河弯道识别通常需要进行人工标记,标记效率不高,且准确性受主观影响大。
技术实现思路
1、为了解决内河船舶航线弯道的全自动识别的问题,根据本技术一些实施例的基于内河船舶经纬度数据的弯道识别方法,包括
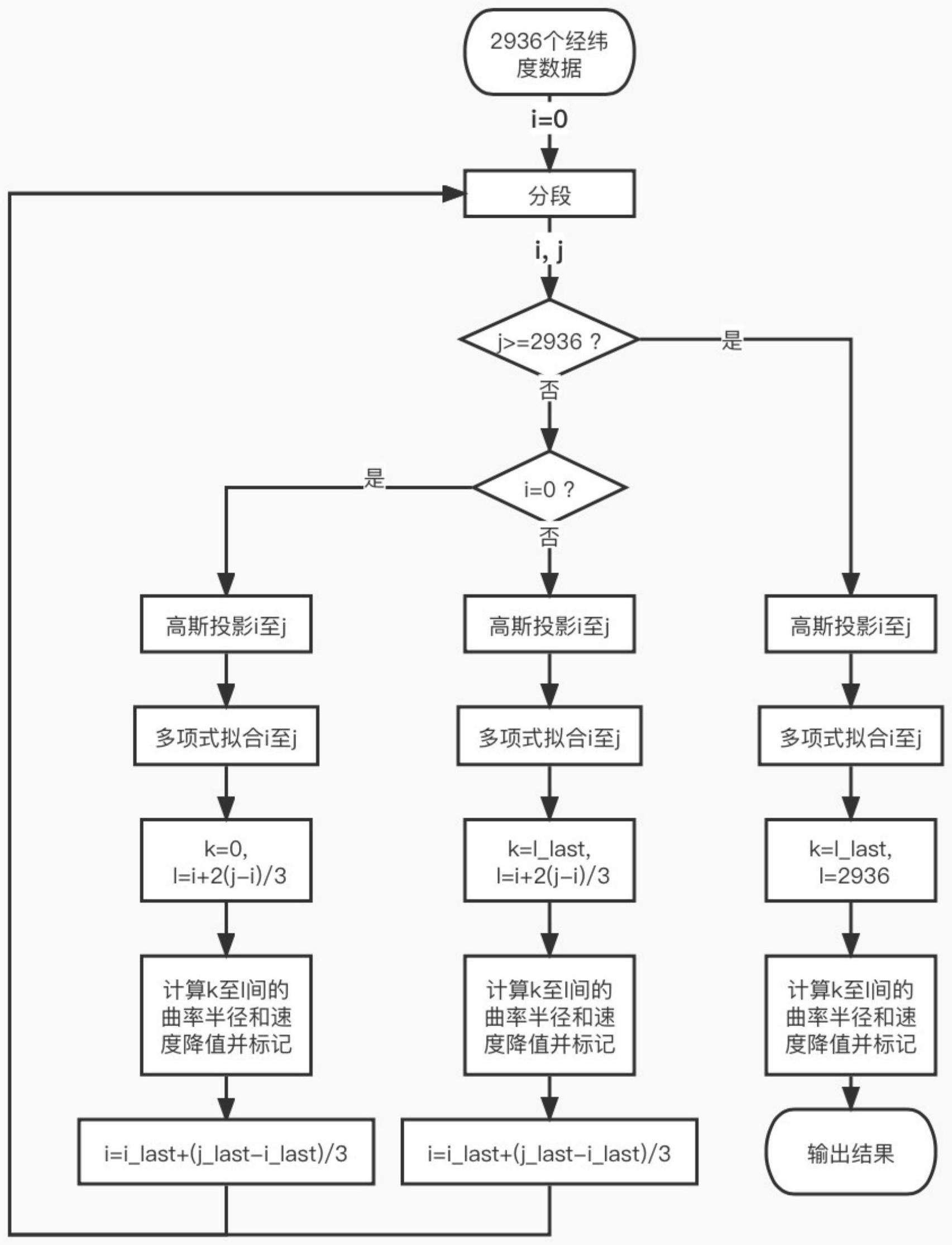
2、步骤1:将通过航行获取n个顺序的经纬度数据的索引设置为从0到n-1;
3、步骤2:根据起始索引i的经纬度数据,将经纬度数据进行分段,分段结果包括索引i和索引j以及索引i和索引j之间的全部索引所对应的经纬度数据;
4、步骤3:将包括索引i和索引j以及索引i和索引j之间的全部索引所对应的经纬度数据投影成平面坐标,平面坐标的索引与经纬度数据的索引相同;
5、步骤4:对所述平面坐标进行多项式拟合;
6、步骤5:根据索引i和索引j的序号i和j,确定索引序号k和l;通过所述平面坐标的多项式拟合结果,计算包括索引k和索引l以及索引k和索引l之间的全部索引所对应的经纬度数据的平面坐标的曲率半径;
7、根据索引k和索引l以及索引k和索引l之间的全部索引所对应的经纬度数据的平面坐标的曲率半径,计算曲率半径对应的内河船舶过弯速度降值;
8、根据内河船舶过弯速度降值对索引k和索引l以及索引k和索引l之间的全部索引所对应的经纬度数据的弯道进行标记;
9、步骤6:根据索引i和索引j的序号i和j,重新确定起始索引i,所述重新确定的起始索引的标记序号大于起始索引的标记序号;
10、步骤7:重复步骤2-步骤6,直至完成全部经纬度数据的弯道标记。
11、根据本技术一些实施例的基于内河船舶经纬度数据的弯道识别方法,所述步骤2的分段的方法,包括
12、从起始索引i的经纬度数据开始,索引j的序号从i+1开始增加,每增加一个,检查索引i到索引j的全部索引所对应的经纬度数据的最小经度与最大经度之差,其中,最小经度与最大经度之差的值设定为x,固定个数最小值为y,固定个数最大值为z;
13、s2.1.如果所述最小经度与最大经度之差大于x度,则索引j的序号停止增加,此时若j-i小于y,则序号j=i+y,若j-i大于y则不做操作,得到索引j的序号;
14、如果所述最小经度与最大经度之差不大于x度,则索引j的序号继续增加,直到满足所述最小经度与最大经度之差大于x度,则索引j的序号停止增加,此时若j-i小于y,则序号j=i+y,若j-i大于y则不做操作,得到索引j的序号;
15、如果索引j的序号增加到超过i+z仍未满足满足所述最小经度与最大经度之差大于x度,则索引j的序号停止增加并且序号j=i+z,得到索引j的序号;
16、s2.2.对所得到的索引j的序号和所述起始索引i的序号计算,通过(j-i)÷3的余数,使序号j加一或减一或不变,使(j-i)能被3整除,得到最终索引j的序号,从而得到包括索引i和索引j以及索引i和索引j之间的全部索引所对应的经纬度数据。
17、根据本技术一些实施例的基于内河船舶经纬度数据的弯道识别方法,所述步骤3中将索引i和索引j以及索引i和索引j之间的全部索引所对应的经纬度数据投影成平面坐标的方法,包括
18、s3.1.提取分段后索引i和索引j以及索引i和索引j之间所有经纬度数据中的最小经度和最大经度;
19、s3.2.将高斯克吕格投影中的投影带的中央经线等于二分之一乘最小最大经度之和;
20、s3.3.通过所述中央经线将索引i和索引j以及索引i和索引j之间的经纬度数据投影为平面坐标(x,y)。
21、根据本技术一些实施例的基于内河船舶经纬度数据的弯道识别方法,所述步骤4中对所述平面坐标进行多项式拟合的方法,包括
22、s4.1.对所述中央经线将索引i和索引j以及索引i和索引j之间的经纬度数据投影的平面坐标(x,y)进行平移操作;
23、s4.2.对所述平移操作后的平面坐标(x,y)通过abcd四种方式分别进行多项式拟合:
24、a将所述平移操作后的平面坐标(x,y)直接进行多项式拟合;
25、b将所述平移操作后的平面坐标(x,y)的x和y的值互换之后进行多项式拟合;
26、c将述平移操作后的平面坐标(x,y)沿坐标原点向右旋转45度之后进行多项式拟合;
27、d将述平移操作后的平面坐标(x,y)的沿坐标原点向左旋转45度之后进行多项式拟合;
28、s4.3.计算abcd四种方式拟合结果r平方,选取r平方最大的拟合结果为最终拟合结果,若r平方中最大拟合结果合格则进行步骤5;若r平方中最大拟合结果均不合格,则进行第五种方式进行多项式拟合:
29、e从所述平移操作后的平面坐标(x,y)开始,以坐标原点为中心以30度为单位顺时针旋转坐标点,共生成12组平面坐标,并对每组平面坐标进行多项式拟合,得到12组你和结果;
30、s4.4.计算e方式中的12组拟合结果r平方,选取r平方最大的拟合结果为最终拟合结果,若r平方中最大拟合结果合格则进行步骤5;若r平方中最大拟合结果不合格,则拟合失败,选择拟合结果中r平方中最大拟合结果进行步骤5。
31、根据本技术一些实施例的基于内河船舶经纬度数据的弯道识别方法,所述步骤s4.1具体包括将索引i和索引j以及索引i和索引j之间经纬度数据投影的平面坐标(x,y)的x和y值都减去这一分段内的x最小值和y最小值,再各自加上10,使这一分段的平面坐标向坐标原点平移靠拢;
32、所述步骤s4.2中将述平移操作后的平面坐标(x,y)沿坐标原点向右旋转45度操作的方法包括
33、先将笛卡尔坐标(x,y)值转换为极坐标(ρ,θ);
34、接着将极坐标中θ加上π/4;
35、然后极坐标转换为笛卡尔坐标(x,y)值;
36、最后每个坐标的x和y值都减去所有坐标的x最小值和y最小值,保证所有值为正;
37、所述步骤s4.2中将述平移操作后的平面坐标(x,y)沿坐标原点向左旋转45度操作的方法包括
38、先将笛卡尔坐标(x,y)值转换为极坐标(ρ,θ);
39、接着将极坐标中θ减去π/4;
40、然后极坐标转换为笛卡尔坐标(x,y)值;
41、最后每个坐标的x和y值都减去所有坐标的x最小值和y最小值,保证所有值为正。
42、根据本技术一些实施例的基于内河船舶经纬度数据的弯道识别方法,拟合结果评价指标使用r平方决定系数,r平方大于0.999代表拟合合格;
43、所述多项式拟合具体为:从5次多项式拟合开始,若拟合结果r平方合格则结束多项式拟;若拟合结果r平方不合格则多项式次数加一,再次拟合,拟合结果r平方合格则结束;若多项式次数增加至20,拟合结果r平方仍未合格,则强制结束多项式拟合。
44、根据本技术一些实施例的基于内河船舶经纬度数据的弯道识别方法,所述步骤步骤5中根据索引序号i和j,确定索引序号k和l的方法包括
45、当起始索引i的序号等于0时,表示这一分段是起始段,此时索引k的序号等于索引i的序号等于0,索引l的序号等于i+(j-i)÷3×2;
46、当索引j的序号大于等于n-1时,表示这一分段是结尾段,此时索引k的序号等于上一次迭代中的索引l的序号,本次迭代索引l的序号等于n-1;
47、当索引i的序号和索引j的序号不满足上述两种条件时,表示这一分段是中间段,此时索引k的序号等于上一次迭代中索引l的序号,本次迭代索引l的序号等于i+(j-i)÷3×2。
48、根据本技术一些实施例的基于内河船舶经纬度数据的弯道识别方法,所述步骤步骤5中根据索引k和索引l以及索引k和索引l之间的全部索引所对应的经纬度数据的平面坐标的曲率半径,计算曲率半径对应的内河船舶过弯速度降值的方法,包括
49、根据步骤步骤中的合格的r平方中最大拟合结果,计算索引k到索引l的所对应的经纬度数据的各个平面坐标的曲率半径;
50、通过费尔索夫速度降公式,计算曲率半径对应的速度降具体数值,使用该数值作为平面坐标点所对应经纬度数据的弯道标记,其中,费尔索夫速度降公式:
51、
52、式中:vc为船舶在回转过程中速度;v0为船舶回转初速,r为回转曲率半径,l为船长。
53、根据本技术一些实施例的基于内河船舶经纬度数据的弯道识别方法,速度降具体数值越接近1表示弯道曲率半径越大,越接近直线,过弯阻力越小;速度降具体数值越小代表弯道曲率半径越小,过弯阻力越大,要减速过弯。
54、根据本技术一些实施例的基于内河船舶经纬度数据的弯道识别方法,步骤6中根据索引i和索引j的序号i和j,重新确定起始索引i的方法,包括通过对当前迭代中索引i和索引j的序号计算,重新确定的起始索引i的序号增加(j-i)÷3。
55、有益效果:
56、本发明通过经度差进行分段可以保证将后续投影的形变可控在非常小的范围。
57、本发明以固定经度差方式为主、固定个数方式为辅的分段策略保证了少数南北方向(经度变化小的方向)的内河航线也能分段成功。通过调节分段的经度差和最大最小个数,可以适应不同采集频率的航航行数据和弯道过于密集的航线。
58、本发明使用每段经度最大最小值之和的二分之一为中央经线,形成局部高斯克吕格投影带,而不是使用标准投影带,进一步减少了高斯克吕格投影的形变。
59、本发明通过abcde五种方式进行多项式拟合,在保证航线没有形变的前提下,大大提升了多项式拟合的成功率。
60、本发明通过特定的多项式拟合方式,在保证成功率的前提下,大大提升了运算速度。
61、本发明通过每段只计算中间份曲率半径而不考虑两端,消除了弯道出现在某一段两端而造成拟合及曲率半径计算不准确的特殊情况。
62、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!