基于阵列信息改进的多径环境下2D-DOA和极化联合估计方法
本发明属于阵列信号处理的,其涉及一种对多径信源进行参数的方法,特别是一种基于极化阵列信息改进的多径环境下2d-doa和极化联合估计方法。
背景技术:
1、二维波达方向(two-dimensional direction-of-arrival,2d-doa)估计是阵列信号处理所研究的主要问题之一。其主要原理是利用传感器阵列对来波信号进行空域采样,通过阵元间的相位差进行角度估计。目前,已涌现出大量的2d-doa估计算法,如liu和mendel的(t.h.liu,j.m.mendel,“azimuth and elevation direction finding usingarbitrary array geometries,”ieee transactions on signal processing,1998,46(7):2061-2065.)算法;wu和liao的(y.wu,g.liao,“a fast algorithm for 2-ddirection-of-arrival estimation,”signal processing,2003,83(8):1827-1831.)算法;xi和liping的(n.xi,l.liping,“a computationally efficient subspace algorithmfor 2-d doa estimation with l-shaped array,”ieee signal processing letters,2014,21(8):971-974.)算法。然而,上述算法一般仅考虑非相干源的应用背景。在实际应用中,阵列接收信号一般存在严重的多径效应,即源信号是相干的。相干源会引起接收信号的秩亏效应,从而引起算法性能衰退甚至失效。已有部分算法关注2d-doa估计中的多径效应问题,典型的解决策略主要有空域平滑算法,如chen的(y.m.chen,“on spatial smoothingfor two-dimensional direction-of-arrival estimation of coherent signals,”ieeetransactions on signal processing,1997,45(7):1689-1696.)算法;协方差矩阵重构算法,如chen和kwong的(f.j.chen,s.kwong,“esprit-like two-dimensional doaestimation for coherent signals”ieee transactions on aerospace and electronicsystems,2010,46(3):1477-1484.)算法。然而上述算法存在一定缺陷,chen的方案在需要阵列是线性的同时也损失了阵列的有效孔径;kwong和chen的方案对阵列的要求必须是均匀的。
2、电磁矢量传感器(electromagnetic vector sensor,emvs)作为一类新型的传感器,是阵列信号处理的新分支。emvs通过相互正交的偶极子和磁环感知来波信号,单个emvs不仅能感知来波的2d-doa信息,还能感知来波信号的极化特征。与传统标量传感器组成的阵列相比,emvs组成的阵列在理论上具有明显的优势,体现在较高分辨率、较强抗干扰、较稳定检测能力和极化多址能力这四个方面,因而引起国内外学术界和工程界的广泛关注。2d-doa和极化估计也相应成为目前电磁矢量传感器阵列研究的热点问题之一。经过近30年的发展,已涌现大量优秀的估计算法,有基于旋转不变技术的参数估计(estimationmethod of signal parameters via rotational,esprit)算法,比如ren和ma的(s.ren,x.ma,“2-d unitary esprit-like direction-of-arrival(doa)estimation forcoherent signals with a uniform rectangular array,”sensors,2013,13(4):4272-4288.);平行因子(parallel factor,parafac)算法,比如ahmed和xiaofei的(t.ahmed,z.xiaofei,“rectangular array of electromagnetic vector sensors:tensormodelling/decomposition and doa-polarisation estimation,”iet signalprocessing,2019,13(7):689-699.)。此外,也已有部分算法关注emvs阵列中的相干源问题,如空间平滑(spatial smoothing)算法,徐和刘的(徐友根,刘志文,“电磁矢量传感器阵列相干信号源波达方向和极化参数的同时估计:空间平滑方法,”通信学报.05(2004):28-38.);极化平滑(polarization smoothing)算法,如rahamim和tabrikian的(d.rahamim,j.tabrikian,“source localization using vector sensor array in a multipathenvironment,”ieee transactions on signal processing,2004,52(11):3096-3103.);极化差分平滑(polarization difference smoothing)算法,如he和jiang的(j.he,s.jiang,“polarization difference smoothing for direction finding of coherentsignals,”ieee transactions on aerospace and electronic systems,2010,46(1):469-480.)等。但徐的算法阵列形状受限于均匀线型,且算法的精度受阵列孔径限制;rahamim的算法由于对极化信息进行了平滑,导致最后不能对极化状态进行估计;he的算法也因为对极化信息进行了做差处理,导致最后不能对极化状态进行估计。综合上述各种算法的不足,亟待一种改进新方法突破在算法精度,复杂度和阵元间距等方面的不足。
技术实现思路
1、本发明所要解决的技术问题是提供一种基于阵列信息改进的多径环境下2d-doa和极化联合估计方法,能够适于平行的阵列流型,能够解决由相干源造成的缺秩问题,并使用接近实际工程中应用的ura阵列场景,结合空间旋转不变性及矢量叉乘技术获得2d-doa和极化联合估计。
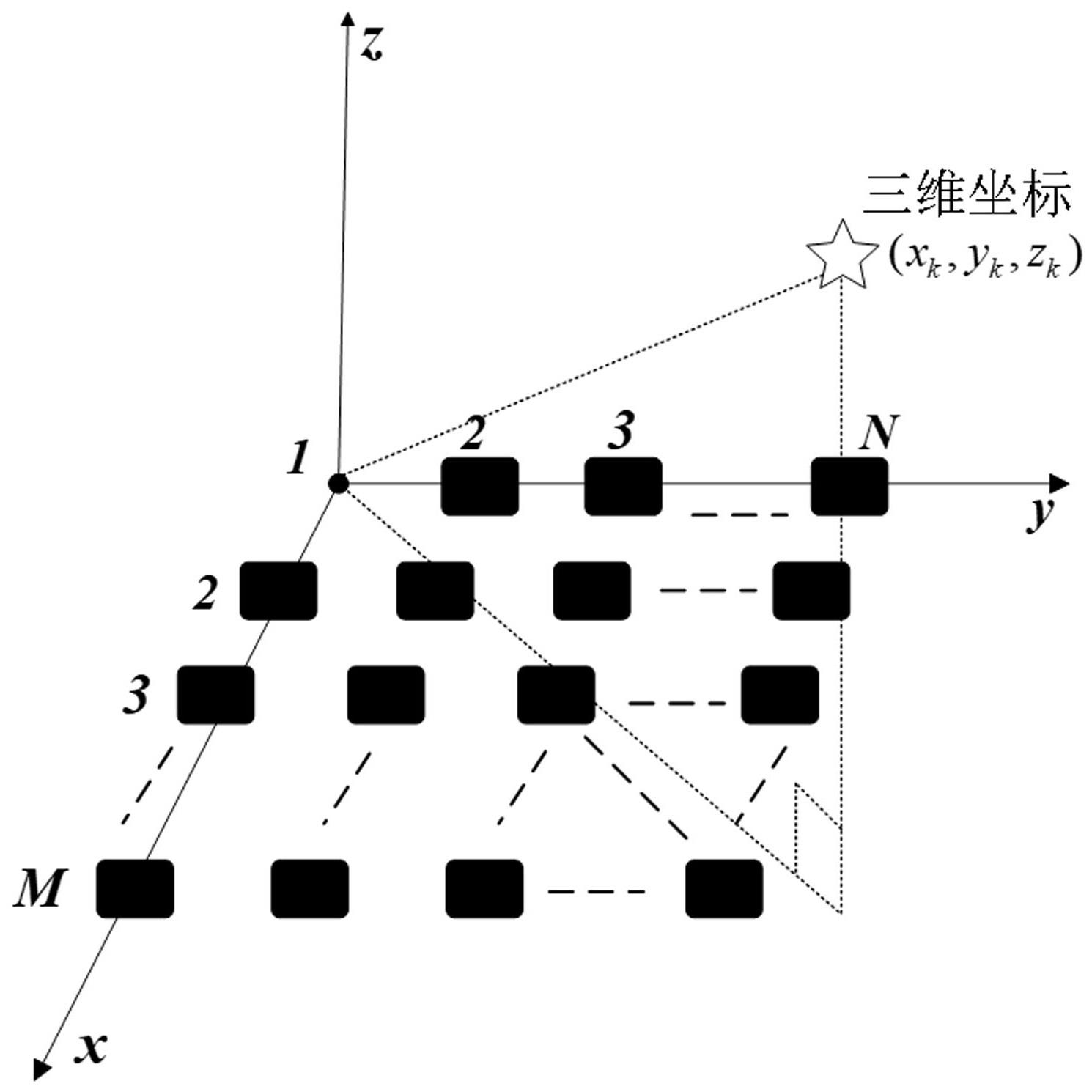
2、为解决上述技术问题,本发明所采用的技术方案是:一种基于阵列信息改进的多径环境下2d-doa和极化联合估计方法,包括阵列流型由平行的阵列构成的接收天线,每个阵元均由完备的电磁矢量传感器(electro-magnetic vector sensor,emvs)构成,发射阵列由m×n个emvs组成ura阵列几何结构,emvs间距分别为dx=dxλ/2,dy=dyλ/2,其中λ为远场信号波长,dx和dy为大于或者等于1的整数;
3、采用上述装置进行2d-doa和极化联合估计包括如下步骤:
4、s1、对原有模型的输出数据进行重新排列,构造无秩亏效应的数据模型:并对重排的数据的协方差矩阵进行特征值分解,得到信号子空间;
5、s2、结合矢量叉乘技术和最小二乘技术获得2d-doa和极化联合估计。
6、优选的方案中,步骤s1中包括以下步骤:
7、s11、对原有模型的输出数据重新排列构成新的模型;
8、用m和n(m,n为整数)表示接收阵列emvs的行数和列数,用λ表示信号波长,用dx=dxλ/2和dy=dyλ/2分别表示行阵元间距和列阵元间距,dx和dy为为大于或者等于1的整数;接收阵元用k(k为正整数)表示远场信号的个数,令θk,φk,γk,ηk分别为第k个(k=1,2,...k)信源相对于接收阵列的俯仰角、方位角、辅助极化角和极化相位差,接收阵列输出公式为:
9、
10、上式中,表示克罗内克积,表示khatrirao积,和分别为x轴和y轴的接收阵列对第k个信号的空域响应矢量,为相应的极化响应矢量,sk为第k个信号的复包络;ax=[ax,1,ax,2,…,ax,k]t,ay=[ay,1,ay,2,…,ay,k]t,为噪声样本;上标t表示转置;定义uk=sinθk cosφk,vk=sinθk sinφk,响应矢量的公式分别如下:
11、
12、
13、
14、
15、
16、定义by=ay⊙b,重排接收输出y后所构造的模型如下:
17、x=by(st⊙ax)t+nz(3)
18、式中,x为重排后的数据矩阵,为数据经过重新排列后的对应噪声。
19、优选的方案中,步骤s1中还包括以下步骤:
20、s12、对所构造的新模型进行特征值分解,得到信号子空间;
21、x相应的协方差矩阵r为:
22、r=by(st⊙ax)t(st⊙ax)by+rnz(4)
23、接着对协方差矩阵r进行特征分解,得到信号子空间es,由于by满秩则:
24、es=byt(5)
25、式中t为某一维度为k×k的满秩矩阵。
26、优选的方案中,步骤s2中包括以下步骤:
27、s21、构造极化选择性矩阵并估计旋转不变的极化因子,定义式中:in表示维度为n×n的单位矩阵,i6,q表示维度为1×6的i6的第q行,得到:
28、jqest-1=j1est-1d(q,1) (6)
29、其中,上标-1表示矩阵的逆,极化域旋转不变因子构造计算
30、
31、其中,上标*表示共轭运算。通过上式获得的即为uk、vk的估计值,▲为矢量叉积运算;
32、s22、获得信源2d-doa和极化联合估计,2d-doa估计为
33、
34、极化估计为:
35、
36、
37、
38、式中表示中的第q个元素,||为取模运算,angle[]表示取主幅角值。
39、本发明提供的一种基于阵列信息改进的多径环境下2d-doa和极化联合估计方法,适用于平行的阵列流型,通过采用矩阵重构的方法解决由相干源造成的缺秩问题。不仅能提供相干源的高分辨的2d-doa估计,而且能够提供源信号的极化特征。本发明专利针对相干源即多径背景技术效果较佳。本发明的算法还适用于任意阵元间距的阵列结构。
- 还没有人留言评论。精彩留言会获得点赞!