基于三轴磁通门传感器的磁小模块系统
1.本发明涉及磁感探测领域,尤其涉及基于三轴磁通门传感器的磁小模块系统。
背景技术:
2.磁通门传感器是利用被测磁场中高导磁铁芯在交变磁场的饱和激励下,其磁感应强度与磁场强度的非线性关系来测量弱磁场的一种传感器,与其他类型测磁仪器相比,磁通门传感器具有分辨力高、测量弱磁场范围宽、可靠、能够直接测量磁场的分量和适于在速运动系统中使用等特点,随着磁通门传感器的广泛使用,基于全国产化器件和已有的三轴磁通门传感器产品的磁小模块系统也得到的相关领域人员的广泛研究与使用;
3.现有的磁小模块系统无法实现磁信号的采集、内部存储、数据读取,且功耗较高,工作时间短,其结构设计无法满足技术指标要求,为此,我们提出基于三轴磁通门传感器的磁小模块系统。
技术实现要素:
4.本发明的目的是为了解决现有技术中存在的缺陷,而提出的基于三轴磁通门传感器的磁小模块系统。
5.为了实现上述目的,本发明采用了如下技术方案:
6.基于三轴磁通门传感器的磁小模块系统,包括安装板,所述安装板上端四角分别固定安装有铜螺柱三,且四组所述铜螺柱三两两关于安装板中心轴对称,所述安装板上方通过铜螺柱三固定连接有基板,所述安装板前端固定连接有接插件。
7.作为本发明的进一步方案,所述安装板上端活动连接有电池,所述基板上端固定连接有四组铜螺柱一,所述基板上方通过铜螺柱一活动连接有探头控制电路板,所述基板上端左下角固定连接有探头座腔体,所述探头座腔体内部固定连接有三组磁通门探头,且三组所述磁通门探头之间为两两垂直正交的位置关系。
8.作为本发明的进一步方案,所述探头座腔体制作材料选用非金属工程塑胶材料psu,且所述探头座腔体内部正交交错分布三组孔,所述探头座腔体底部有两个螺纹孔,用于把探头座腔体固定在基板上,三组所述磁通门探头可与正交孔配合,互不干涉,并在一端预留线缆出线槽,同时三组所述磁通门探头采集的数据分别代表x轴磁场值、y轴磁场值、z轴磁场值,探头座腔体出线槽出来的信号线缆,水平向右连接到探头控制电路板。
9.作为本发明的进一步方案,所述探头控制电路板采用fr-4材料双层板设计,共由两块板组成,底层、顶层两层电路pcb板之间通过插排针连接,组装时通过辅助工装保证层与层之间间距,顶层pcb外形尺寸为70.5
×
22mm,所述探头控制电路板上有四个通孔,基板上对应有四个通孔,所述探头控制电路板通过四颗铜螺柱与基板连接,且所述探头控制电路板的pcb设计符合gjb362-87印制板通用规范要求,底层pcb与顶层pcb间隔为2.5mm。
10.作为本发明的进一步方案,所述基板上端左上角固定连接有l型支架,所述l型支架三组侧壁分别固定连接有四组铜螺柱二,所述l型支架三组侧壁通过铜螺柱二分别活动
连接有姿态传感器,所述基板上端靠近后侧固定连接有数据采集模块。
11.作为本发明的进一步方案,所述l型支架的两个侧面和台阶面作为安装面,两两正交,所述l型支架的三个正交安装面上分别有四个螺纹孔用于固定姿态传感器,且所述l型支架的底面有四个螺纹孔,对应基板上的四个通孔,用于进行安装固定。
12.作为本发明的进一步方案,所述姿态传感器具体型号为国产mems加速度传感器jfmz,其采用集成x-y-z三轴方案,与数据采集模块一同集成在电路板上,通过单片机自带ad采集输出模拟信号,计算得到产品整体的姿态角数据,所述数据采集模块设计采用全国产芯片。
13.作为本发明的进一步方案,所述接插件外部连接有单片机,所述单片机用于下发采集指令,并对采集的数据进行处理,其具体处理步骤如下:
14.步骤一:工作人员为单片机设置串口中断,当单片机接收到上位机的发送指令时,触发中断,进入到中断服务函数,等待上位机发送rtc初始化时间;
15.步骤二:接收到上位机发送的初始化时间后,单片机接解析为rtc初始化所需的bcd码格式以初始化rtc,初始化完成后,单片机发给上位机一个信息,表示rtc初始化完成;
16.步骤三:三组所述磁通门探头以及姿态传感器以定时器为时间基准,当磁通门探头采集一段时间的磁信号后,姿态传感器采集一次姿态数据,再将磁信号和姿态信息打包、存储,同时将本次姿态数据作为这段时间磁小模块的姿态信息,循环往复;
17.步骤四:挂载sd卡,并获取当前rtc时间,之后将rtc时间作为文件名,建立csv格式的文件以写入文件头,然后从小到大分别是时间标记、x轴磁场值、y轴磁场值、z轴磁场值和与磁小模块姿态角相关的俯仰角、横滚角以及航向角,并将数据以行的形式写入。
18.相比于现有技术,本发明的有益效果在于:
19.本发明通过选用非金属工程塑胶材料psu制作探头座腔体,并将三组磁通门探头封装于探头座腔体内正交的三个孔里,并涂胶封装,单片机接收上位机发送的初始化时间以初始化rtc,初始化完成后,三组磁通门探头以及姿态传感器以定时器为时间基准,当磁通门探头采集一段时间的磁信号后,姿态传感器采集一次姿态数据,再将磁信号和姿态信息打包、存储,同时将本次姿态数据作为这段时间磁小模块的姿态信息,循环往复,再挂载sd卡,并获取当前rtc时间,之后将rtc时间作为文件名,建立csv格式的文件以写入文件头,然后从小到大分别是时间标记、x轴磁场值、y轴磁场值、z轴磁场值和与磁小模块姿态角相关的俯仰角、横滚角以及航向角,并将数据以行的形式写入,能够实现磁信号的采集、内部存储、数据读取,加入了姿态传感器,可检测设备的动态情况,同时电子硬件设计满足使用要求和技术指标,结构设计满足技术指标要求,功耗控制得当,连续工作时间长,具有很高的实用价值。
附图说明
20.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。
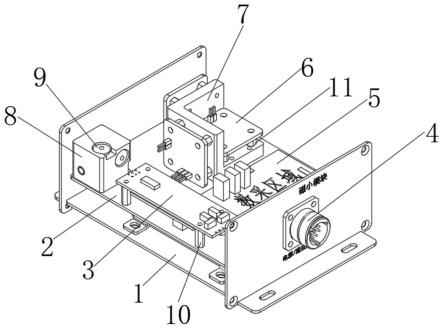
21.图1为本发明提出的基于三轴磁通门传感器的磁小模块系统的整体结构示意图;
22.图2为本发明提出的基于三轴磁通门传感器的磁小模块系统侧视图;
23.图3为本发明提出的基于三轴磁通门传感器的磁小模块系统的系统框图;
24.图4为本发明提出的基于三轴磁通门传感器的磁小模块系统的数据采集模块的设计框图;
25.图5为本发明提出的基于三轴磁通门传感器的磁小模块系统的数据采集模块正面电路设计图;
26.图6为本发明提出的基于三轴磁通门传感器的磁小模块系统的数据采集模块反面电路设计图。
27.图中:1、安装板;2、基板;3、探头控制电路板;4、接插件;5、数据采集模块;6、姿态传感器;7、l型支架;8、探头座腔体;9、磁通门探头;10、铜螺柱一;11、铜螺柱二;12、铜螺柱三;13、电池。
具体实施方式
28.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
29.参照图1-图6,基于三轴磁通门传感器的磁小模块系统,包括安装板1,安装板1上端四角分别固定安装有铜螺柱三12,且四组铜螺柱三12两两关于安装板1中心轴对称,安装板1上方通过铜螺柱三12固定连接有基板2,安装板1前端固定连接有接插件4。
30.安装板1上端活动连接有电池13,基板2上端固定连接有四组铜螺柱一10,基板2上方通过铜螺柱一10活动连接有探头控制电路板3,基板2上端左下角固定连接有探头座腔体8,探头座腔体8内部固定连接有三组磁通门探头9,且三组磁通门探头9之间为两两垂直正交的位置关系。
31.本实施例中,探头控制电路板3采用fr-4材料双层板设计,共由两块板组成,底层、顶层两层电路pcb板之间通过插排针连接,组装时通过辅助工装保证层与层之间间距,顶层pcb外形尺寸为70.5
×
22mm,探头控制电路板3上有四个通孔,基板2上对应有四个通孔,探头控制电路板3通过四颗铜螺柱与基板2连接,且探头控制电路板3的pcb设计符合gjb362-87印制板通用规范要求,底层pcb与顶层pcb间隔为2.5mm,探头座腔体8制作材料选用非金属工程塑胶材料psu,具有良好的耐热不变形及受热不老化的性能,能在-100℃~+160℃保持稳定,且探头座腔体8内部正交交错分布三组孔,探头座腔体8底部有两个螺纹孔,用于把探头座腔体8固定在基板2上,三组磁通门探头9可与正交孔配合,互不干涉,并在一端预留线缆出线槽,同时三组磁通门探头9采集的数据分别代表x轴磁场值、y轴磁场值、z轴磁场值,探头座腔体8出线槽出来的信号线缆,水平向右连接到探头控制电路板3。
32.基板2上端左上角固定连接有l型支架7,l型支架7三组侧壁分别固定连接有四组铜螺柱二11,l型支架7三组侧壁通过铜螺柱二11分别活动连接有姿态传感器6,基板2上端靠近后侧固定连接有数据采集模块5;接插件4外部连接有单片机,单片机用于下发采集指令,并对采集的数据进行处理。
33.需要进一步说明的是,l型支架7的两个侧面和台阶面作为安装面,两两正交,l型支架7的三个正交安装面上分别有四个螺纹孔用于固定姿态传感器6,且l型支架7的底面有四个螺纹孔,对应基板2上的四个通孔,用于进行安装固定,姿态传感器6具体型号为国产mems加速度传感器jfmz1002,其采用集成x-y-z三轴方案,与数据采集模块5一同集成在电路板上,通过单片机自带ad采集输出模拟信号,计算得到产品整体的姿态角数据,数据采集
模块5设计采用全国产芯片。
34.其中,需要说明的是,如图4-图6,数据采集模块5的pcb布线布局严格按照gjb362-87印制板通用规范,依据数据采集电路结构、可靠性设计要求,在结构要素都满足的情况下遵循电磁兼容性好、电子元器件分布均衡合理、外框与丝印清晰、空间利用率最大化、整体外形美观等原则,其pcb板的外形参数严格按照数据采集电路结构设计,背面无较高元器件,各端口全部以插针形式给出,与各传感器和上位机以杜邦线形式连接。
35.具体的,如图3所示,工作人员为单片机设置串口中断,当单片机接收到上位机的发送指令时,触发中断,进入到中断服务函数,等待上位机发送rtc初始化时间,接收到上位机发送的初始化时间后,单片机接解析为rtc初始化所需的bcd码格式以初始化rtc,初始化完成后,单片机发给上位机一个信息,表示rtc初始化完成,三组磁通门探头9以及姿态传感器6以定时器为时间基准,当磁通门探头9采集一段时间的磁信号后,姿态传感器6采集一次姿态数据,再将磁信号和姿态信息打包、存储,同时将本次姿态数据作为这段时间磁小模块的姿态信息,循环往复;再挂载sd卡,并获取当前rtc时间,之后将rtc时间作为文件名,建立csv格式的文件以写入文件头,然后从小到大分别是时间标记、x轴磁场值、y轴磁场值、z轴磁场值和与磁小模块姿态角相关的俯仰角、横滚角以及航向角,并将数据以行的形式写入。
36.其中,需要说明的是,操作人员需要做的包括:连接串口,波特率设置9600;发送“set-time”指令;发送初始化时间,时间格式为:年-月-日-时-分-秒,中间以
“‑”
隔开;等待初始化完成信息,信息为“rtc-set success”。就可以自行设置rtc时间。
37.需要进一步说明的是,文件头分别为分别为time、magx(nt)、magy(nt)、magz(nt)、angx、angy以及angz。
38.需要进一步说明的是,由于ttl串口与水密接口连接,所以将串口直接与上位机连接,上位机即可实时显示数据,而磁小模块的数据保存在sd卡中,也可通过usb访问sd卡,从而读取数据,这个过程通过fatfs文件系统和usb通信协议实现,在单片机复位后,初始化sd卡通信的sdio接口和usb接口,在采集开始进行之前,建立所需的数据文件,采集过程中同步文件,采集完毕后关闭文件,将usb与上位机连接读取文件。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1